1、简介
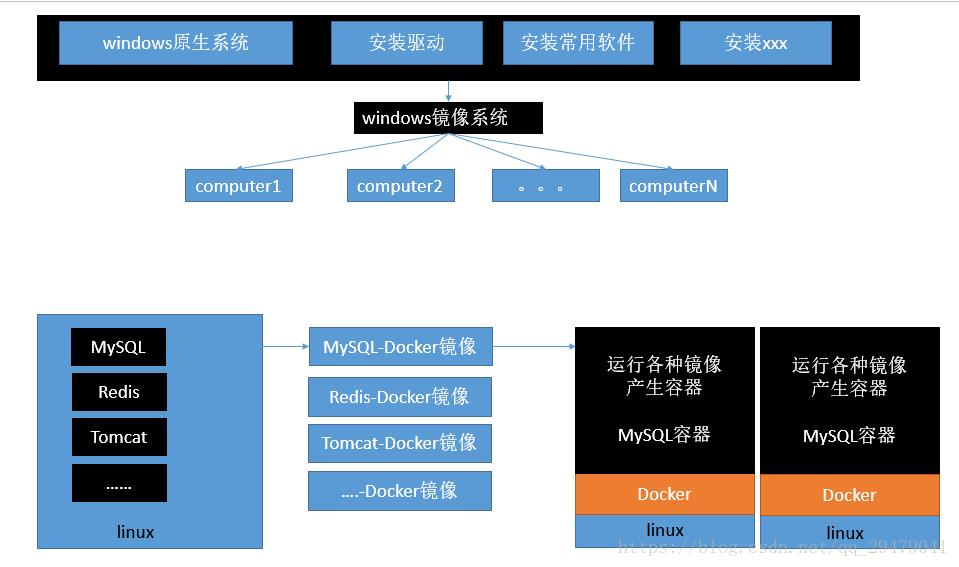
Docker是一个开源的应用容器引擎;是一个轻量级容器技术;
Docker支持将软件编译成一个镜像;然后在镜像中各种软件做好配置,将镜像发布出去,其他使用者可以直接使用这个镜像;
运行中的这个镜像称为容器,容器启动是非常快速的。
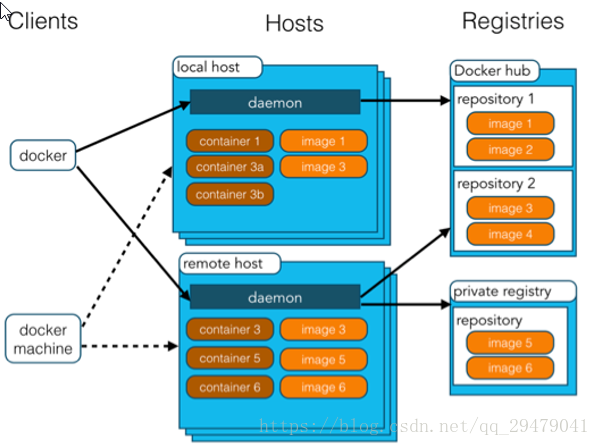
2、核心概念
docker主机(Host):安装了Docker程序的机器(Docker直接安装在操作系统之上);
docker客户端(Client):连接docker主机进行操作;
docker仓库(Registry):用来保存各种打包好的软件镜像;
docker镜像(Images):软件打包好的镜像;放在docker仓库中;
docker容器(Container):镜像启动后的实例称为一个容器;容器是独立运行的一个或一组应用
使用Docker的步骤:
- 安装Docker
- 去Docker仓库找到这个软件对应的镜像;
- 使用Docker运行这个镜像,这个镜像就会生成一个Docker容器;
- 对容器的启动停止就是对软件的启动停止;
3、安装docker步骤:
1、检查内核版本,必须是3.10及以上
uname -r
2、安装docker
yum install docker
3、输入y确认安装
4、启动docker
[root@localhost ~]# systemctl start docker
[root@localhost ~]# docker -v
Docker version 1.12.6, build 3e8e77d/1.12.6
5、开机启动docker
[root@localhost ~]# systemctl enable docker
Created symlink from /etc/systemd/system/multi-user.target.wants/docker.service to /usr/lib/systemd/system/docker.service.
6、停止docker
systemctl stop docker
7、重启docker服务
service docker restart
4、镜像操作
1、检索
docker search 关键字
2、拉取
docker pull 镜像名:tag
:tag是可选的,tag表示标签,多为软件的版本,默认是latest
3、查看所有本地镜像
docker images
4、删除指定的本地镜像
docker rmi image-id
https://hub.docker.com/
5、容器操作
软件镜像(QQ安装程序)----运行镜像----产生一个容器(正在运行的软件,运行的QQ);
1、搜索镜像
[root@localhost ~]# docker search tomcat
2、拉取镜像
[root@localhost ~]# docker pull tomcat
3、根据镜像启动容器
docker run --name mytomcat -d tomcat:latest
4、docker ps
查看运行中的容器
5、 停止运行中的容器
docker stop 容器的id
6、查看所有的容器
docker ps -a
7、启动容器
docker start 容器id
8、删除一个容器
docker rm 容器id
9、启动一个做了端口映射的tomcat
[root@localhost ~]# docker run -d -p 8888:8080 tomcat
-d:后台运行
-p: 将主机的端口映射到容器的一个端口 主机端口:容器内部的端口
10、为了演示简单关闭了linux的防火墙
service firewalld status ;查看防火墙状态
service firewalld stop:关闭防火墙
11、查看容器的日志
docker logs container-name/container-id
更多命令参看
https://docs.docker.com/engine/reference/commandline/docker/
可以参考每一个镜像的文档
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)