Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
ROS常用知识点总结——Cmakelist
2023-05-16
Cmakelist编译规则
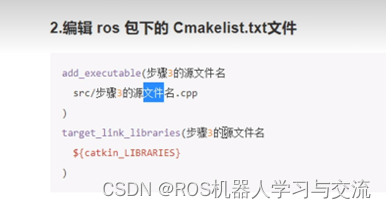
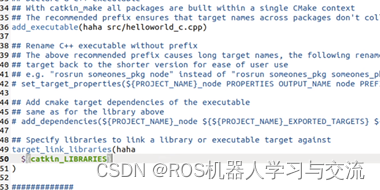
1、Cmakelist通常需要添加可执行文件名称,并且指定编译的源文件即可
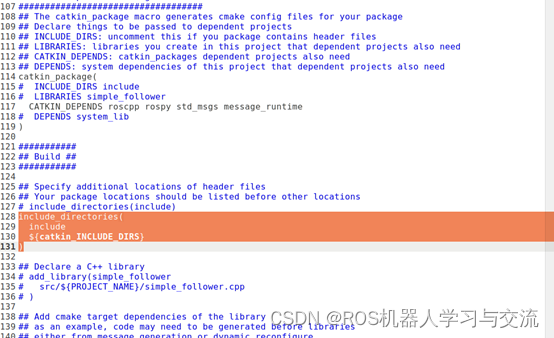
2、添加头文件编译时候,应当在Cmakelist文件中打开以下标记出的部分,否则编译找不到头文件
Cmakelist规则详解:
链接: Cmakelist详解
链接: Cmakelist详解
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
ROS常用知识点总结——Cmakelist 的相关文章
APM-3.5.2-EKF2笔记(未完待续)
20180704 xff1a 一 EKF2 InitialiseFilter 全过程 1 记录开始时间 xff0c 预期步长时间 frameTimeUsec 61 2500 xff0c 每次融合读取IMU次数 framesPerPredic
在K8s上部署Go服务
目标 镜像名 xff1a foxliang go v 镜像内容 xff1a 二进制文件 xff0c 跑起来是个http服务 xff0c 监听8080端口 xff0c 接到请求会打印 This is version v running in
Java中可以直接调用类中静态方法,不用实例化
先说结论 xff1a 可以不实例化一个类的情况 xff0c 使用一个类中的静态方法静态方法里 xff0c 只能调用静态方法 先通俗的分析下 xff0c 我们把类看作是一个房子 房子里面有家具 xff0c 桌椅板凳之类的 xff0c 房子里面
【Linux】深入理解线程(线程同步、互斥量mutex、死锁、读写锁、条件变量、信号量)
一 同步概念 1 线程同步 xff1a 同步即协同步调 xff0c 按预定的先后次序运行 线程同步 xff0c 只一个线程发出某一功能调用时 xff0c 在没有得到结果之前 xff0c 该调用不返回 同时 xff0c 其他线程为保证数据一致
pytorch得到模型的计算量和参数量
文章目录 方法1 自带方法2 编写代码方法3 thop方法4 torchstat方法5 ptflops方法6 torchsummary 方法1 自带 pytorch自带方法 xff0c 计算模型参数总量 total span class t
slam、高精地图、定位之间的关系
高精度地图一般都是指slam 43 卫惯共同制作的区域地图 xff0c 只有卫惯只能得到位置信息 xff0c 没办法得到地物信息 卫惯给绝对位置 xff0c slam给地物 地形信息和相对距离 xff0c 然后融合制作等 2 使用激光雷达或
慕课《如何写好科研论文》期末考试题及答案
多选 论文写作前的积累包括哪些 实验细节 Idea 专业知识 讲座学术论文质量标准包括 形式标准 内容标准和学术期刊打交道的最大好处是 编辑部聘请的审稿人的专业意见 编辑部提出的技术方面的建议什么情况下 xff0c 应果断放弃一些题目 已经
docker学习笔记(七)docker-swarm
目录 搭建Swarm环境 swarm基本操作 swarm实战 docker swarm服务发布模式 docker stack 官网 https docs docker com swarm overview Docker Swarm is n
【前端】ajax 接口返回图片文件流,将图片保存至自己服务器,并展示该图片
一 解决前 1 1 问题描述 ajax 调用第三方接口 xff0c 接口没有返回图片链接 xff0c 直接返回的图片 现在要将文件保存至服务器 xff0c 并返回自身的链接 span class token comment 解决前的代码 s
http请求带用户名和密码验证
发送http请求往往需要带用户名和密码 xff0c 服务端进行授权验证 实现方式是将将用户名和密码放到请求头里面 xff0c 采用Basic Authentication Scheme xff0c 译为基本授权方案 xff0c 想要了解的可
【TPM2.0原理及应用指南】 1-3章
码字不易 xff0c 求求点个赞呗 第一章 TPM的历史 可信平台模块 xff08 TPM xff09 是一种加密协处理器 可信计算组织 xff08 TCG xff09 直接匿名认证 DAA 认证可迁移密钥 xff08 Certified
QGC通过网络连接飞控(树莓派+ROS桥接MavLink)
1 为树莓派刷ubuntu 因为无界面的ubuntu在连接无线 设置自动登录等方面的设置比较复杂 我经过各种百度尝试后 均没有成功 所以我放弃了 转而又刷了ubuntu mate 带界面 然后连接了无线 设置了自动登录 静态IP 自此树莓派
大厂大数据岗位面试随笔
大厂面试简要记录 1 腾讯2 阿里 1 腾讯 腾讯PCG事业部 大数据开发岗 问题回忆 xff1a spark数据分发机制Hadoop集群高可用机制阐述Spark Streaming给个具体视频应用场景阐述开发思路及任务架构 xff08 期
南京邮电大学C++实验三(多态性实验)
文章目录 一 实验目的和要求二 实验环境 实验设备 三 实验原理及内容 xff08 一 xff09 实验题目1 xff1a 1 题目2 代码3 程序运行结果 4 实验解答过程 xff1a 1 类Point的构造函数 xff1a 2 用成员函
ROS package.xml教程
文章目录 总览标准格式2 xff08 推荐格式 xff09 基本结构必要标签依赖元包其他标签 标准格式1 xff08 遗留格式 xff09 总览 ROS的package包使用package xml文件来描述 xff0c 该描述文件必须放置在
如何从论文中实现算法复现(译)
原文地址 xff1a http xff1a codecapsule com 2012 01 18 how to implement a paper 作者 xff1a Emmanuel Goossaert 翻译 xff1a Joseph Ar
CMakeList.txt
一个视频讲解 http v youku com v show id XMjc1MjE0MjEwNA 61 61 html cmake 语法设置路径 xff0c 配置库 xff0c 编译器标记 xff1a https www cnblogs
GPS ROS包
NMEA GPS数据读取 span class hljs label http span wiki span class hljs preprocessor ros span span class hljs preprocessor org
Arduino Atmega328P烧写bootloader及熔丝
Arduino Atmega328P烧写bootloader及熔丝 Cc1924的博客 CSDN博客 亲测成功
云服务器 搭建 AWTRIX 服务器
Java 环境 首先检查 java 版本 如果没有 安装 openjdk 后再执行 sh脚本 yum list java 1 8 yum install java 1 8 0 openjdk y wget N https blueforce
随机推荐
esp8266对接天猫精灵(1)前言
本系列文章小狂决定一步步来完成其他智能设备与天猫精灵的对接 xff0c 简单粗暴的目的就是使用ESP8266或者其他的wifi设备制造一个智能设备 xff0c 完成一次天猫精灵智能音箱对我们自己制造的智能设备的控制 xff0c 以来验证天猫
牢记公式,ardupilot EKF2就是纸老虎(二)!
版权声明 xff1a 本文为博主原创文章 xff0c 转载请附上博文链接 xff01 二 扩展卡尔曼滤波器 因为卡尔曼滤波器针对的是线性系统 xff0c 状态转移模型 xff08 说的白话一点就是知道上一时刻被估计量的值 xff0c 通过状
esp8266对接天猫精灵(3)原理
这一篇文章主要讲解服务器端的设置 xff0c 这里我使用的是腾讯云 xff0c 当时学生价1块钱一个月买的 xff0c 现在的学生价涨到了10块 xff0c 为我当时的机智点赞 为什么一定要使用服务器呢 xff0c 这个是因为天猫精灵协议的
esp8266对接天猫精灵(8)开发者网关地址
洋洋洒洒六七千字已经搭进去了 xff0c 终于把服务器篇写的差不多了 xff0c 当然小狂不是专业的写手 xff0c 有些东西写的凑合看吧 xff0c 只是说明过程 xff0c 并不修饰言辞 xff0c 看的舒服就点个赞 xff0c 不舒服
esp8266对接天猫精灵(10)nodumcu固件编译
一 下载编译器 进入这个网站 xff0c https esp8266 ru esplorer xff0c 找到这个地方 xff0c 可以直接下载 xff0c 下载完成后双击红框中的内容就能打开 打开后的截图如下图所示 xff0c 左边为代码
esp8266对接天猫精灵(11)终端编程
一 编写lua脚本获取控制信息 xff08 8266 xff09 前边也说过 xff0c 这个脚本要实现的步骤可以分三步 xff0c 第一步是联网 xff0c 第二步是使用http get到数据 xff0c 然后控制要控制的设备 我们的lu
Altium Designer -- 精心总结
如需转载请注明出处 xff1a http blog csdn net qq 29350001 article details 52199356 以前是使用DXP2004来画图的 xff0c 后来转行 想来已经有一年半的时间没有画过了 突然转
Arduino点亮ws2812
先加载ws2812库文件 span style color rgb 68 68 68 font family none font size 14px background color rgb 255 255 255 a target bla
Arduino 旋转编码器ky-040
int pinA 61 3 Connected to CLK on KY 040 CLK接 pin3 int pinB 61 4 Connected to DT on KY 040 DT接pin4 SW是按键 xff0c 不用接 int e
Dockerfile
Dockerfile文件 xff0c 自创镜像 一 概念 xff1a 二 案例 xff1a 1 先创建一个Dockerfile文件2 编写内容3 构建镜像4 运行 三 指令 xff1a FROM xff1a MAINTAINER xff1a
关于嵌入式无人机之模型创建-使用3D打印装配体01
做嵌入式的同学离不开硬件的支撑 那么无人机作为一套综合性工程 span class token punctuation span 涉及软件 span class token punctuation span 嵌入式 span class t
牢记公式,ardupilot EKF2就是纸老虎(三)!
版权声明 xff1a 本文为博主原创文章 xff0c 转载请附上博文链接 xff01 三 掀开EKF2的神秘面纱 EKF2是EKF算法在ardupilot上的代码实现 读到这里你也许已经忘了 xff0c EKF的5大公式 虽然下面是7个公式
ROS节点 报错process has died [pid 3322522, exit code -11
偶尔出现 我的情况是两个节点 ros span class token double colon punctuation span span class token function init span span class token p
JS的冒泡函数
今天下午学习了冒泡函数的加载和运行 一 var a 61 20 30 40 20 15 5 25 for var i 61 0 i lt a length i 43 43 for var j 61 1 j lt a length j 43
ubuntu server 版安装桌面
安装xfce4 xff08 或其他桌面 xff09 amp xinit sudo apt install xfce4 xinit安装Display Manager 安装xdm xff0c 虽然有着古早的界面 xff0c 但是不会安装任何依赖
ubuntu下gazebo加载很慢解决办法
ubuntu下gazebo加载很慢解决办法 前言 刚安装好 r o s ros r o s 后 xff0c 在终端输入命令 gazebo 启动 g
从用户态是怎么切换到核心态的?
此文章参考了 Linux 用户态通过中断切换到内核态详解 简答来说 xff0c 用户态和核心态的区别就是 xff1a 两者的操作权限不同 xff0c 用户态的进程能够访问的资源受到了极大的控制 xff0c 而运行在内核态的进程可以 为所欲为
将rgbd数据集制作成rosbag,并发布图片和camera_info消息
因为最近做的项目需要和别的开源项目做一些对比 xff0c 比如rgbdslamV2 xff0c 但是rdgbslamV2使用的输入是rosbag xff0c 并且他必须要订阅四个话题才能运行 xff0c 这四个话题分别是 xff1a cam
PX4添加自定义日志消息
固件版本 xff11 11 一 将要观察的数据声明成uORB消息 xff0c 并发布 我这里随便添加了一个 在logged topics cpp里的add default topics函数里加上一行add topic fanbu 100 或
ROS常用知识点总结——Cmakelist
Cmakelist编译规则 1 Cmakelist通常需要添加可执行文件名称 xff0c 并且指定编译的源文件即可 2 添加头文件编译时候 xff0c 应当在Cmakelist文件中打开以下标记出的部分 xff0c 否则编译找不到头文件 C
热门标签
滚珠螺杆
实用R语言技能
Python语法基础
可观测
数明深力科
深力科隔离门极驱动器
环境配置与搭建
EDI
电子数据交换
系统对接方式
知行edi
cLiteDB
CoCode项目管理
CC探究
目标检测算法改进系列
Windows系列
菜谱