一、USB简介
USB(Universal Serial BUS)通用串行总线,是一个外部总线标准,用于规范电脑与外部设备的连接和通讯。是应用在 PC 领域的接口技术。USB 接口支持设备的即插即用和热插拔功能。USB 是在 1994 年底由英特尔、康柏、IBM、Microsoft 等多家公司联合提出的。
USB 发展到现在已经有 USB1.0/1.1/2.0/3.0 等多个版本。目前用的最多的就是 USB1.1 和 USB2.0,USB3.0 目前已经开始普及。STM32F103 自带的 USB 符合 USB2.0 规范,不过 STM32F103 的 USB 都只能用来做设备,而不能用作主机。
标准 USB 共四根线组成,除 VCC/GND 外,另外为 D+,D-; 这两根数据线采用的是差分电压的方式进行数据传输的。在 USB 主机上,D-和 D+都是接了 15K 的电阻到低的,所以在没有设备接入的时候,D+、D-均是低电平。而在 USB 设备中,如果是高速设备,则会在 D+上接一个 1.5K 的电阻到 VCC,而如果是低速设备,则会在 D-上接一个 1.5K 的电阻到 VCC。这样当设备接入主机的时候,主机就可以判断是否有设备接入,并能判断设备是高速设备还是低速设备。
STM32F103 的 MCU 自带 USB 从控制器,符合 USB 规范的通信连接;PC 主机和微控制器之间的数据传输是通过共享一专用的数据缓冲区来完成的,该数据缓冲区能被 USB 外设直接访问。这块专用数据缓冲区的大小由所使用的端点数目和每个端点最大的数据分组大小所决定,每个端点最大可使用 512 字节缓冲区(专用的 512 字节,和 CAN 共用),最多可用于 16 个单向或 8 个双向端点。USB 模块同 PC 主机通信,根据 USB 规范实现令牌分组的检测,数据发送/接收的处理,和握手分组的处理。整个传输的格式由硬件完成,其中包括 CRC 的生成和校验。
1.1 USB DFU简介
DFU全称为Download Firmware Update,是ST官方推出的一个通过USB接口进行IAP升级的方案,同串口ISP一样,他们都集成在了芯片内部的Bootloader区段,可以通过配置boot引脚来启动。(具体可参照ST文档:AN2606)。不过内置DFU的芯片大部分型号都比较新,如果你用的型号没有内置DFU程序,没关系我们也可以通过CubeMX来快速生成和移植一个DFU功能程序到你的Flash中来使用。
由于DFU是USB差分传输,相对而言速率和通讯稳定性上相当于UART更加快与稳定,但是由于设备端不知道待接收文件的大小,何时传输结束,只为传输而传输,相比较带有完整文件传输协议而言(Ymodem、Xmodem等)这个差太多,不过CDC可以替代解决这个问题。
二、新建工程
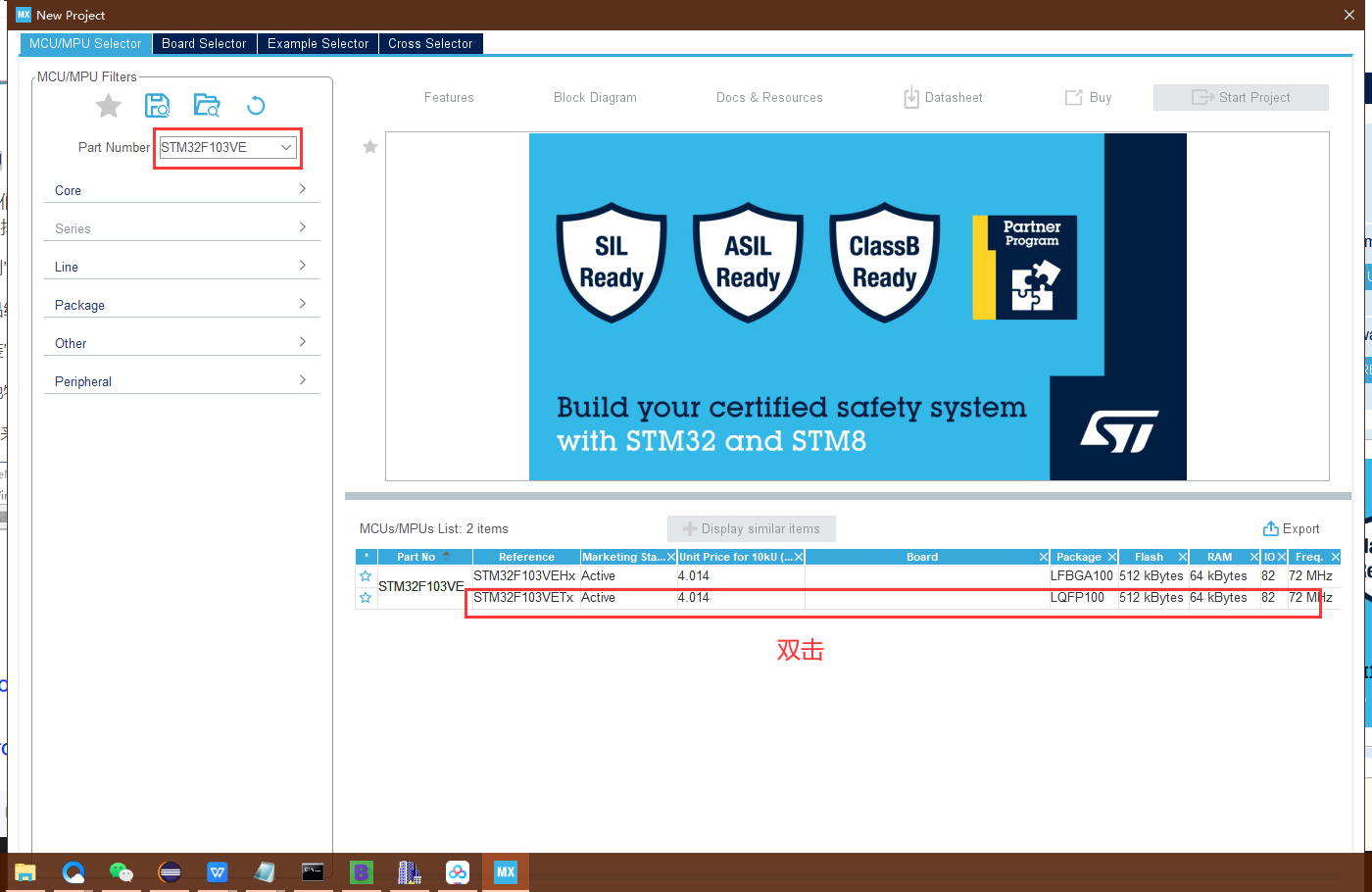
1. 打开 STM32CubeMX 软件,点击“新建工程”

2. 选择 MCU 和封装
3. 配置时钟
RCC 设置,选择 HSE(外部高速时钟) 为 Crystal/Ceramic Resonator(晶振/陶瓷谐振器)

选择 Clock Configuration,配置系统时钟 SYSCLK 为 72MHz
修改 HCLK 的值为 72 后,输入回车,软件会自动修改所有配置

4. 配置调试模式
非常重要的一步,否则会造成第一次烧录程序后续无法识别调试器
SYS 设置,选择 Debug 为 Serial Wire

三、USB
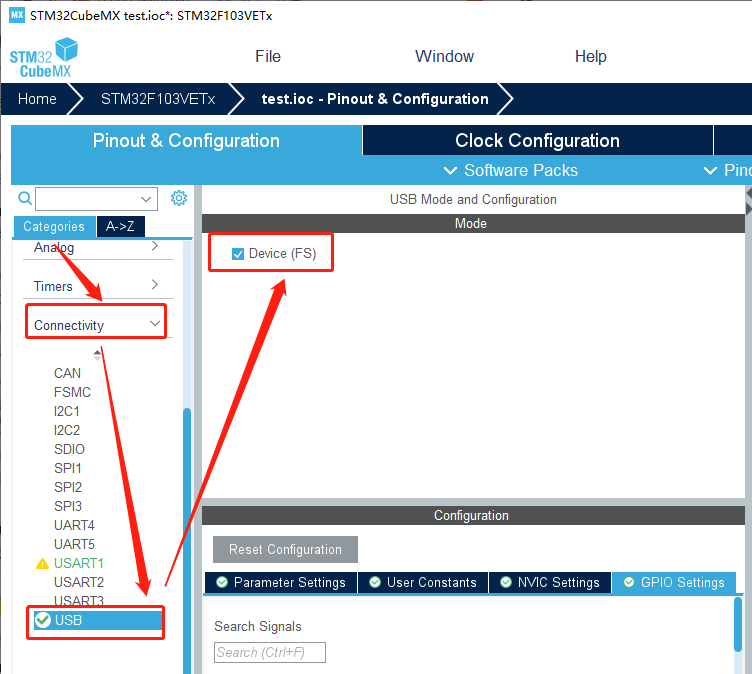
3.1 参数配置
在 Connectivity 中选择 USB 设置,并勾选 Device(FS) 激活 USB 设备。
在 Parameter Settings 进行具体参数配置。
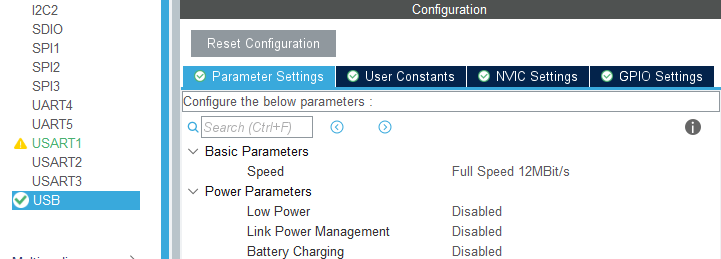
- Speed:
Full Speed 12MBit/s(固定为全速) - Low Power: 默认
Disabled(在任何不需要使用usb模块的时候,通过写控制寄存器总可以使usb模块置于低功耗模式(low power mode ,suspend模式)。在这种模式下,不产生任何静态电流消耗,同时usb时钟也会减慢或停止。通过对usb线上数据传输的检测,可以在低功耗模式下唤醒usb模块。也可以将一特定的中断输入源直接连接到唤醒引脚上,以使系统能立即恢复正常的时钟系统,并支持直接启动或停止时钟系统。)
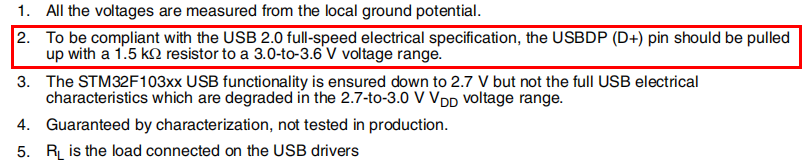
3.2 引脚配置
USB 的 DP 引脚必须上拉 1.5K 欧的电阻,电脑才能检测到 USB,否则检测不到。
查看野火指南者开发板原理图可知,需要将 PD6 配置为低电平使能 USB。

在右边图中找到 PD6 引脚,选择 GPIO_Output。
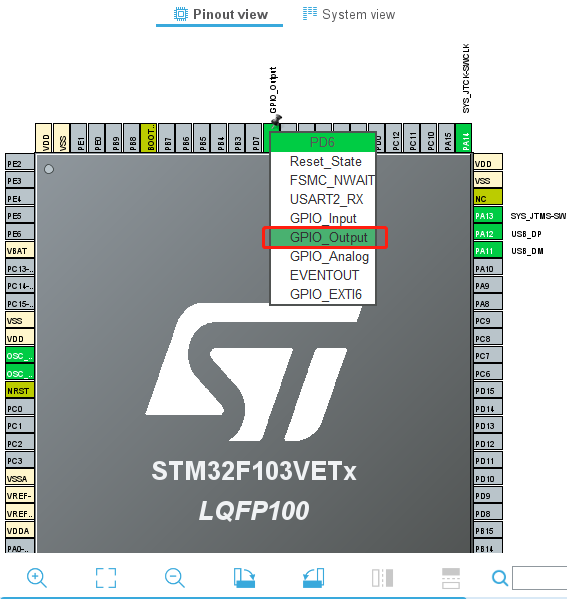
在GPIO output level 中选择 Low 输出低电平。

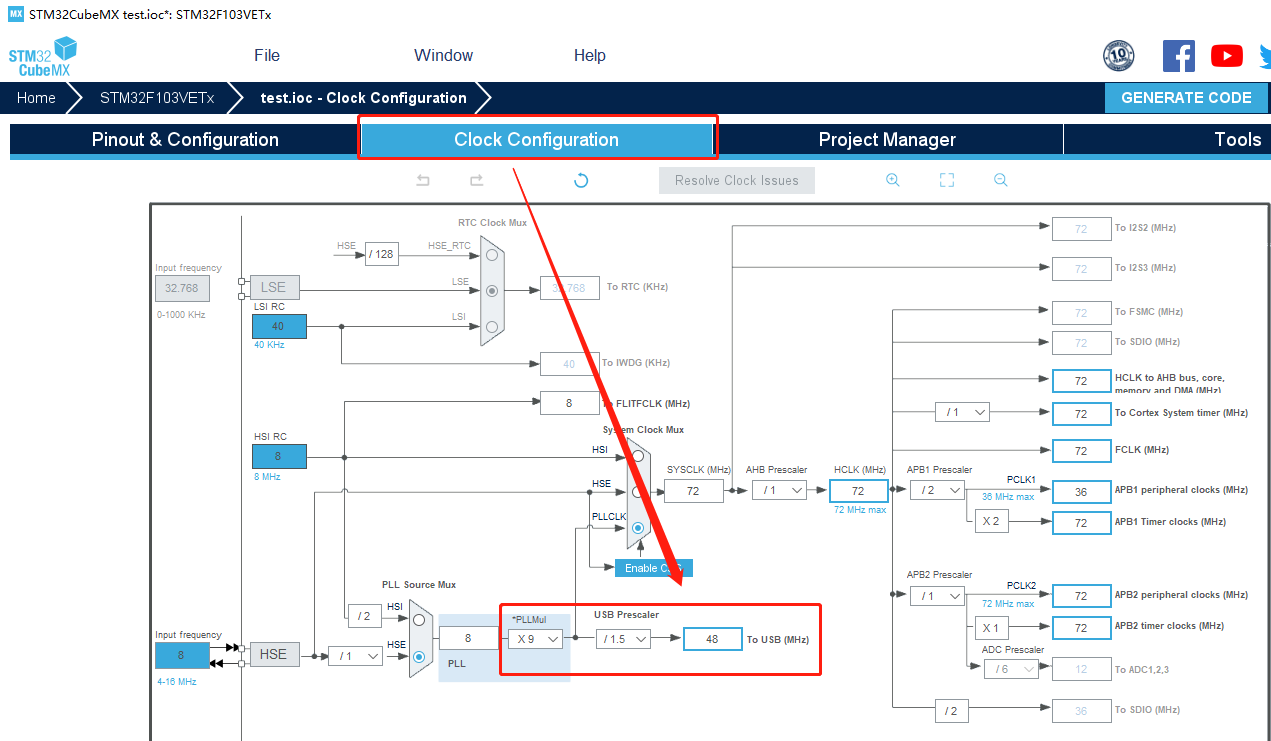
3.3 配置时钟
选择 Clock Configuration,USB 时钟配置为 48MHz,且来源最好是外部晶振分频得到。
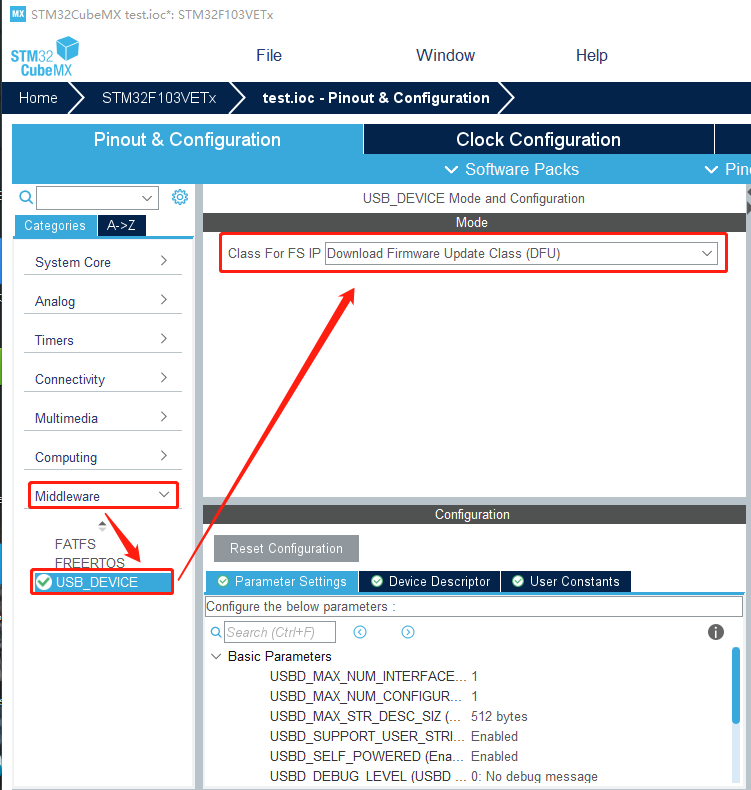
3.4 USB Device
USB有主机(Host)和设备(Device)之分。一般电脑的USB接口为主机接口,而键盘、鼠标、U盘等则为设备。
部分型号的STM32芯片有1~2个USB接口。像STM32F103系列的有一个USB Device接口,STM32F407系列的有2个USB接口,既可以作为HOST,又可以作为Device,还可以作为OTG接口。
在 Middleware 中选择 USB_DEVICE 设置,在 Class For FS IP 设备类别选择 Download Firmware Update Class(DFU) 固件升级类。
修改参数配置。

- USBD_DFU_XFER_SIZE(每次传输的最大字节数):
1024 Bytes - USBD_DFU_APP_DEFAULT_ADD (Base Address 0x)(升级时存入Application程序的起始地址):
0x08005800
根据下面 六、编写Bootloader程序 编译后 .map 文件大小,可以了解程序存储到了哪些区域。来设置Application程序起始地址,避开Bootloader程序地址范围。

打开 map 文件后,查看文件最后部分的区域,可以看到一段以 “Memory Map of the image” 开头的记录(若找不到可用查找功能定位)

Bootloader程序的基地址是 0x08000000,大小为 0x00004a84,可知它占用的最高的地址空间为 0x08004a84。0x08000000~0x08005800 的 0x5800/1024=22KB 存储空间存储DFU程序。USBD_DFU_APP_DEFAULT_ADD 设置的起始地址就要避开这个范围。
- USBD_DFU_MEDIA Interface(对芯片Flash使用的描述):
@Internal Flash /0x08000000/11*002Ka,245*002Kg【这个参数是DfuSeDemo这个DFU升级软件需要识别的参数】
- 0x08000000,表示起始地址
- “a”代表的是Read-only,表示所指明的区域应该为Bootloader程序的空间不可擦除或者修改
- “g”代表Read/Write/Erase,表示所指明的区域应该为Application程序的空间,大小由前面的数字决定
- “*”前面的为Sector的个数,后面的为Sector的大小,这里的意思就是从0x08000000开始,前面11个Sector(每个Sector为2k字节)为Read-only,后面245个Sector(每个Sector为2k字节)为Read/Write/Erase等等。
注意:由于芯片不同,芯片的内部 Flash 分布情况也不一定相同,故请参考使用的芯片参考手册。
STM32F103VET6 型号芯片的参数,即 STM32F1 系列大容量产品。Flash 分为 256 页,每页大小为 2KB,共 512KB。

设备描述符保持默认。

四、添加按键
4.1 GPIO配置
在 System Core 中选择 GPIO 设置。

在右边图中找到按键对应引脚,选择 GPIO_Input。

五、生成代码
输入项目名和项目路径
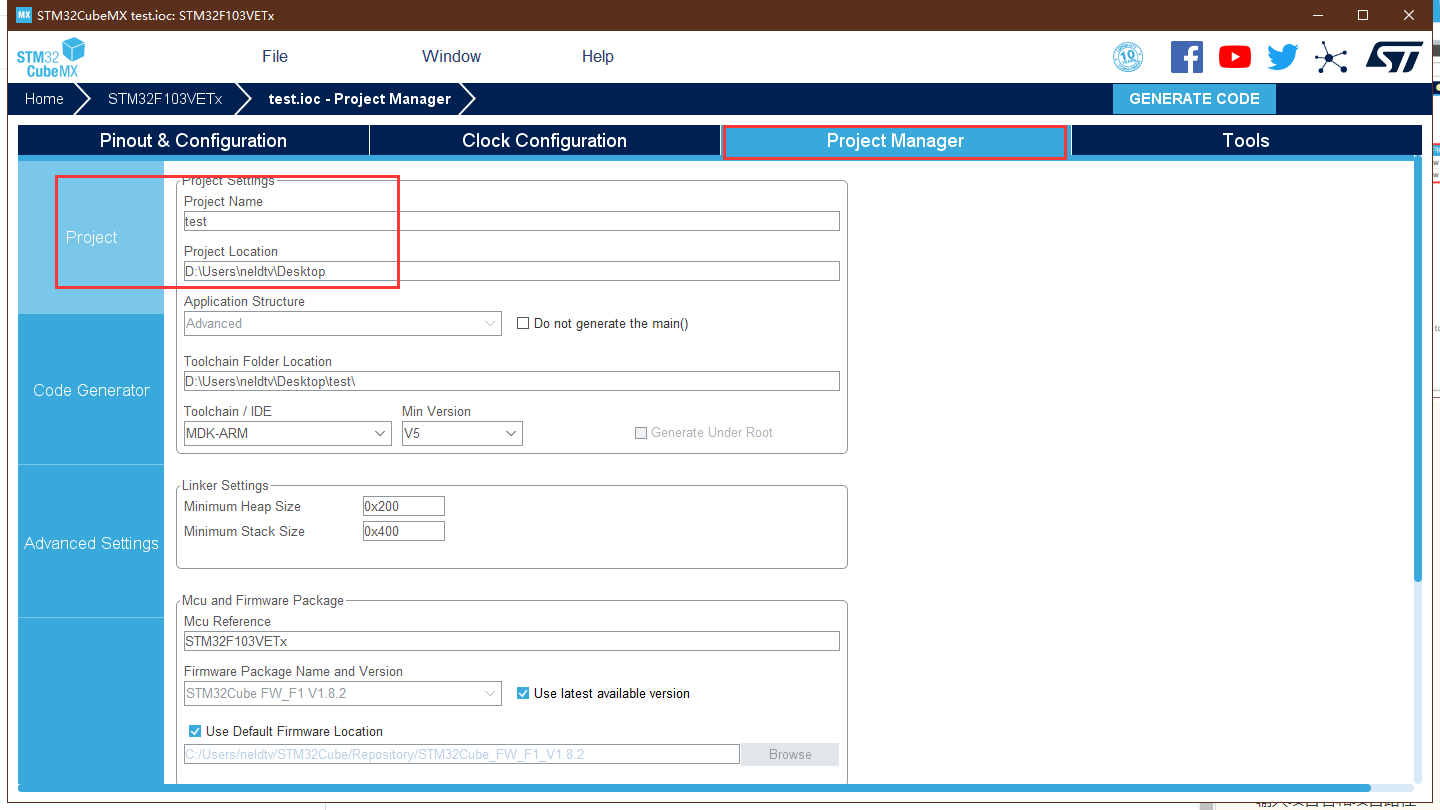
选择应用的 IDE 开发环境 MDK-ARM V5
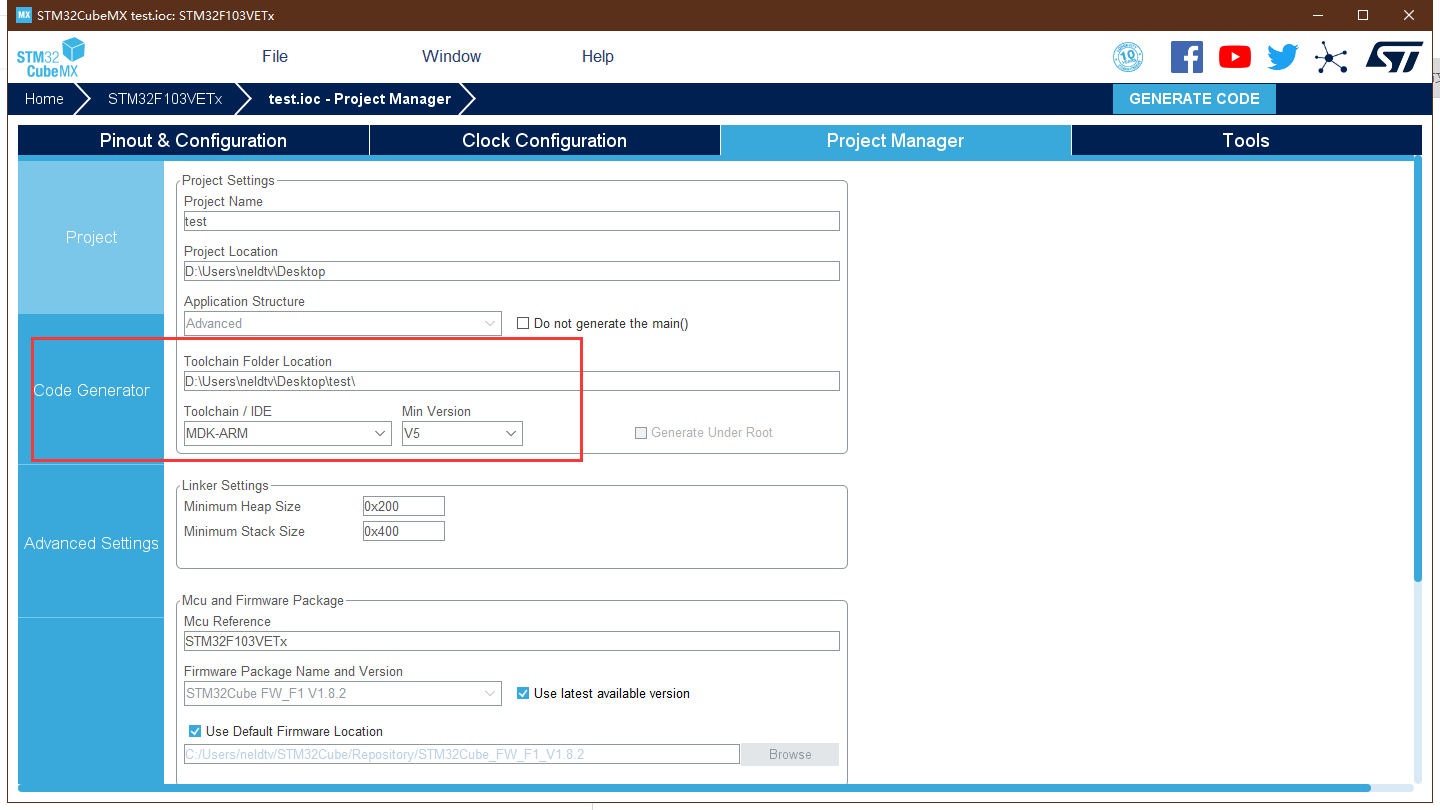
每个外设生成独立的 ’.c/.h’ 文件
不勾:所有初始化代码都生成在 main.c
勾选:初始化代码生成在对应的外设文件。 如 GPIO 初始化代码生成在 gpio.c 中。

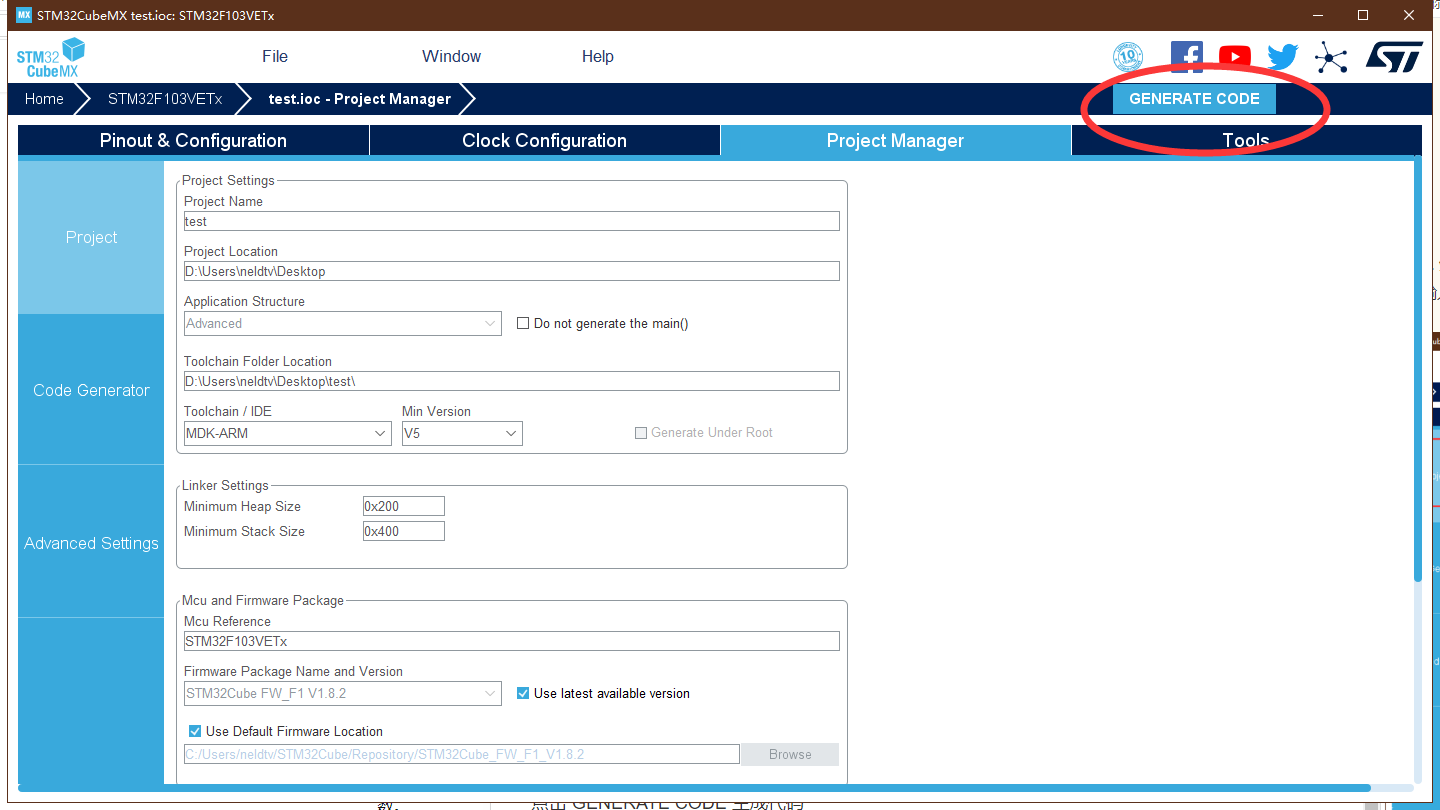
点击 GENERATE CODE 生成代码
六、编写Bootloader程序
6.1 修改usbd_dfu_if.c
打开工程文件夹Application/User/USB_DEVICE/App下usbd_dfu_if.c文件

6.1.1 修改内部Flash操作相关函数
- MEM_If_Init_FS
Flash初始化,将Flash解锁,并将所有的标志位清零,以便后续的写入动作
uint16_t MEM_If_Init_FS(void)
{
HAL_FLASH_Unlock();
__HAL_FLASH_CLEAR_FLAG(FLASH_FLAG_EOP | FLASH_FLAG_WRPERR | FLASH_FLAG_PGERR);
return (USBD_OK);
}
- MEM_If_DeInit_FS
Flash取消初始化,将Flash重新上锁,禁止对Flash的操作
uint16_t MEM_If_DeInit_FS(void)
{
HAL_FLASH_Lock();
return (USBD_OK);
}
uint16_t MEM_If_Erase_FS(uint32_t Add)
{
uint32_t PageError;
HAL_StatusTypeDef status;
FLASH_EraseInitTypeDef eraseinitstruct;
eraseinitstruct.TypeErase = FLASH_TYPEERASE_PAGES;
eraseinitstruct.PageAddress = Add;
eraseinitstruct.NbPages = 1U;
status = HAL_FLASHEx_Erase(&eraseinitstruct, &PageError);
if(status != HAL_OK)
{
return (USBD_FAIL);
}
return (USBD_OK);
}
- MEM_If_Write_FS
Flash写入,将USB接收到的Flash数据写入到Flash中
uint16_t MEM_If_Write_FS(uint8_t *src, uint8_t *dest, uint32_t Len)
{
uint32_t i = 0;
for(i = 0; i < Len; i += 4)
{
if(HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, (uint32_t)(dest + i), *(uint32_t *)(src + i)) == HAL_OK)
{
if(*(uint32_t *)(src + i) != *(uint32_t *)(dest + i))
{
return (USBD_FAIL);
}
}
else
{
return (USBD_FAIL);
}
}
return (USBD_OK);
}
- MEM_If_Read_FS
Flash读取,读取指定地址的数据到目标数组中,并返回数组地址
uint8_t *MEM_If_Read_FS(uint8_t *src, uint8_t *dest, uint32_t Len)
{
uint32_t i = 0;
uint8_t *psrc = src;
for(i = 0; i < Len; i++)
{
dest[i] = *psrc++;
}
return (uint8_t *)(dest);
}
- MEM_If_GetStatus_FS
获取Flash状态
uint16_t MEM_If_GetStatus_FS(uint32_t Add, uint8_t Cmd, uint8_t *buffer)
{
uint16_t FLASH_PROGRAM_TIME = 50;
uint16_t FLASH_ERASE_TIME = 50;
switch(Cmd)
{
case DFU_MEDIA_PROGRAM:
buffer[1] = (uint8_t)FLASH_PROGRAM_TIME;
buffer[2] = (uint8_t)(FLASH_PROGRAM_TIME << 8);
buffer[3] = 0;
break;
case DFU_MEDIA_ERASE:
default:
buffer[1] = (uint8_t)FLASH_ERASE_TIME;
buffer[2] = (uint8_t)(FLASH_ERASE_TIME << 8);
buffer[3] = 0;
break;
}
return (USBD_OK);
}
6.2 修改main.c
添加APP程序入口函数指针。
typedef void (*pFunction)(void);
添加用于加载APP程序的变量、外部按键的判断、APP程序加载以及USB DFU初始化功能。
int main(void)
{
pFunction JumpToApplication;
uint32_t JumpAddress;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USB_DEVICE_Init();
MX_USART1_UART_Init();
printf("\r\n****** USB-DFU Example ******\r\n\r\n");
if(HAL_GPIO_ReadPin(KEY1_GPIO_Port, KEY1_Pin) == GPIO_PIN_RESET)
{
printf("Enter Application\r\n");
if(((*(__IO uint32_t *)USBD_DFU_APP_DEFAULT_ADD) & 0x2FFE0000) == 0x20000000)
{
JumpAddress = *(__IO uint32_t *)(USBD_DFU_APP_DEFAULT_ADD + 4);
JumpToApplication = (pFunction)JumpAddress;
__set_MSP(*(__IO uint32_t *) USBD_DFU_APP_DEFAULT_ADD);
__disable_irq();
JumpToApplication();
}
}
printf("Key Down Enter DFU\r\n");
MX_USB_DEVICE_Init();
while (1)
{
}
}
将程序编译烧录到开发板中
七、编写Application程序
7.1 修改main.c
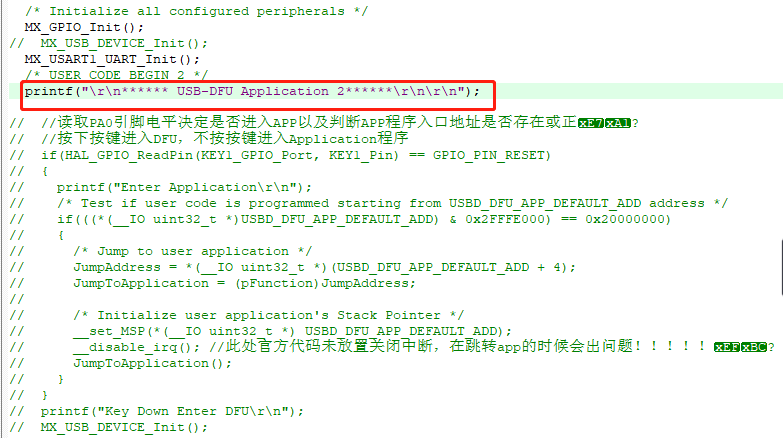
屏蔽掉多余代码,替换打印信息

7.2 修改程序下载地址
修改成跟STM32CubeMX中USBD_DFU_APP_DEFAULT_ADD设置的一样的地址

将程序编译烧录到开发板中
八、查看打印
- 没有按下按键,经过Bootloader程序跳转到Application程序

- 按下KEY1按键,并按RESET按键重启,在Bootloader程序中进入DFU模式
九、下载和使用DFU升级工具
9.1 DfuSe USB设备固件升级软件
官网下载:https://www.st.com/content/st_com/zh/products/development-tools/software-development-tools/stm32-software-development-tools/stm32-programmers/stsw-stm32080.html
百度网盘:https://pan.baidu.com/s/1xViNHEScvAjn9xH1s6Zrgw?pwd=0ypj 提取码:0ypj
注意: 如果设备带有感叹号,则参考下面十一、注意事项

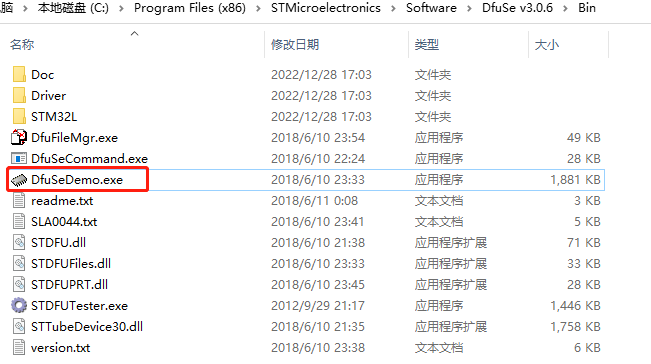
- 打开DfuSeDemo,更新固件
找到安装DfuSe目录下的DfuSeDemo。
点击Choose加载之前转换的.dfu文件;勾选校验功能。

点击Update完成擦除与下载;另外,可以通过点击Verify验证是否下载成功。

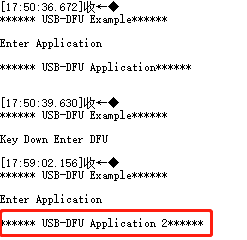
- 重启设备,查看打印
Application程序升级成为Application2程序
9.2 STM32CubeProgrammer
官网下载:https://www.st.com/zh/development-tools/stm32cubeprog.html
百度网盘:https://pan.baidu.com/s/133ahMS2G6lswQzw-G_7fMA?pwd=hece 提取码:hece
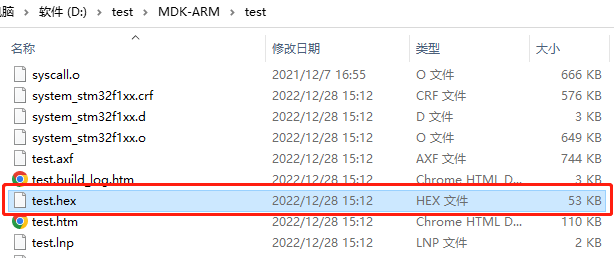
- 编译待升级的Application程序,生成.hex文件
这里修改了打印内容,表示升级后的程序。
找到生成的.hex文件。
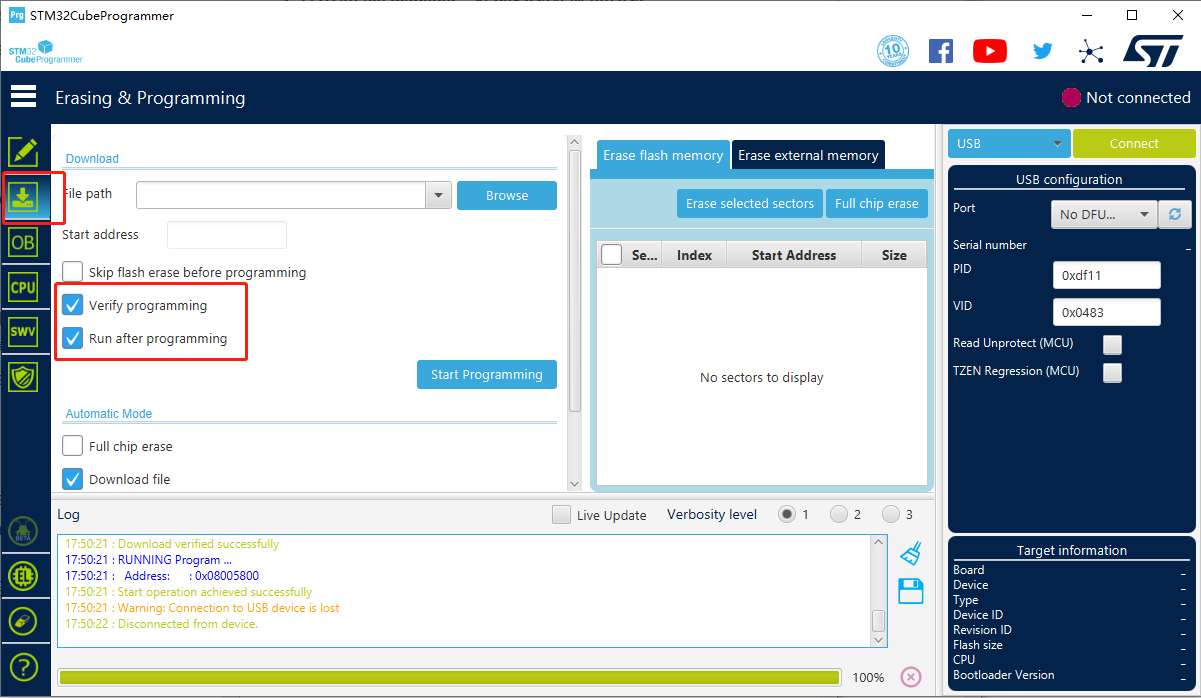
- 打开STM32CubeProgrammer,切换到Erasing&Programming擦除和烧录界面,勾选烧录验证和烧录后重启选项
- 按下KEY1按键,进入DFU模式

注意: 如果设备带有感叹号,则参考下面十一、注意事项

- 选择USB,刷新端口,点击Connect进行连接

点击Browse加载之前新编译的.hex文件;开启烧录。

- 重启设备,查看打印
Application程序升级成为Application2程序
十、工程代码
链接:https://pan.baidu.com/s/1FKdwTyTmybeeNYFKDk43VA?pwd=t2an 提取码:t2an
十一、注意事项
用户代码要加在 USER CODE BEGIN N 和 USER CODE END N 之间,否则下次使用 STM32CubeMX 重新生成代码后,会被删除。

如果USB端口出现感叹号设备无法启动的问题,可适当将堆改大,如0x400


• 由 Leung 写于 2022 年 12 月 30 日
• 参考:利用STM32CubeMX软件生成USB_DEVICE_DFU升级程序
STM32 USB DFU功能
STM32F103 DFU功能实现(MXcube)(一)
STM32 HAL学习(七)USB DFU升级BootLoader
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)



