在安装好旋翼过后其中比较重要的一步就是测试电机的位置和转向是否安装正确。通过地面站的mavlink控制台可以依次对每个电机进行测试。
测试过程需要连接电池,电机会转,在测试之前记得
把桨卸下来。
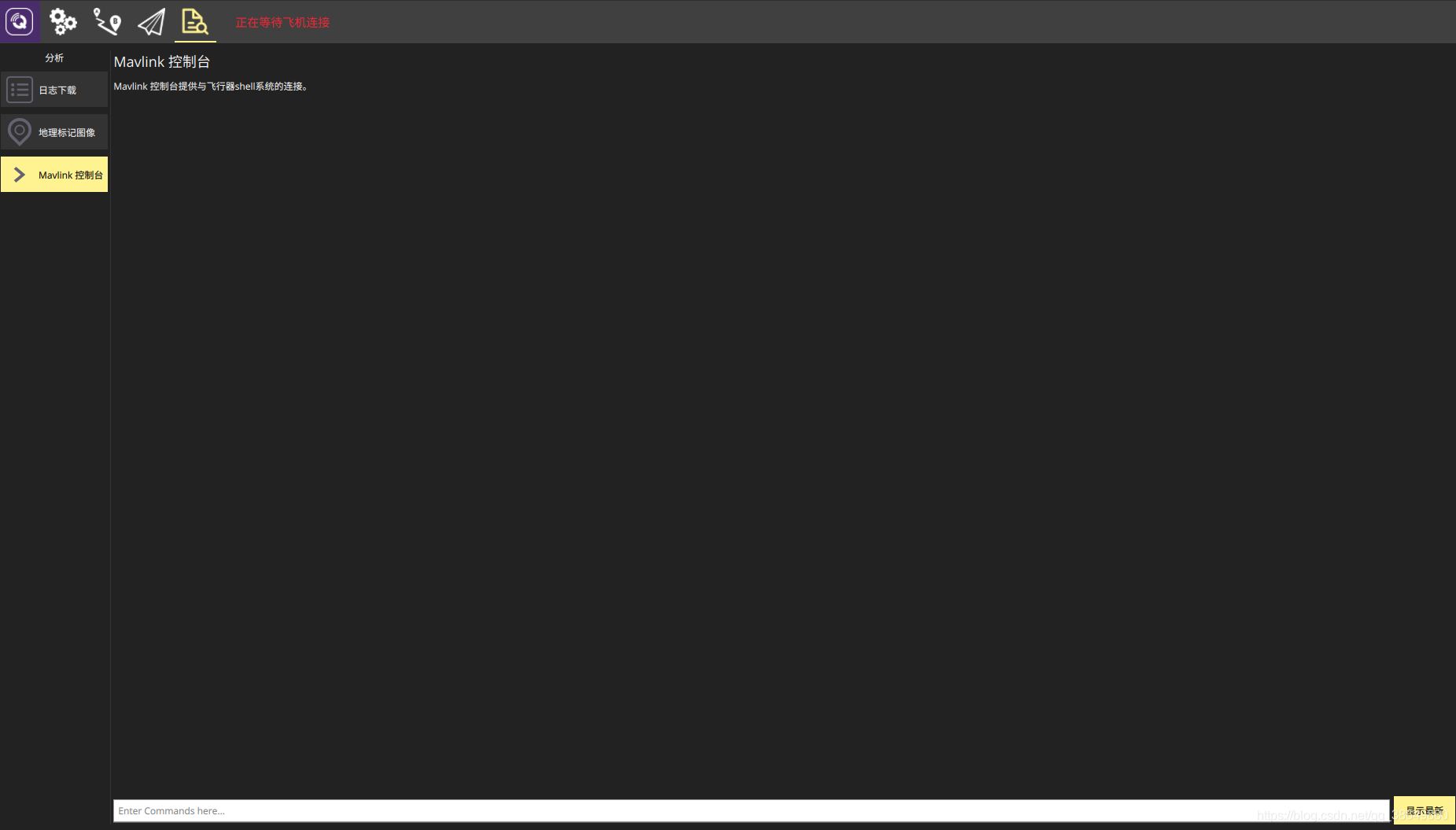
打卡控制台
先打开QGC,等待飞控连接之后。点击最右边的一个图标,然后点击mavlink控制台。
测试电机
这个时候给飞控上电,然后打开安全开关。
输入下面的命令。
pwm test -c 1 -p 1200
-c后面的为测试的电机,-p后面为PWM输出的值,单位为毫秒。通过不断的改变测试的电机可以很好的测试电机的位置和转向是否正确。这个命令-c后也可以测试多个电机。
在测试单个电机的时候电调可能会叫,这是由于其它电机没有PWM输入,没什么影响。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)