目录
1.CANoe软件安装
2. CANoe介绍
3.CANoe软件主界面介绍
通过之前对CAN总线和LIN总线的学习,本节开始对常用的测试工具——CANoe软件进行学习。
开冲!!!
1.CANoe软件安装
Vector中国官网进行CANoe软件下载,如没有硬件支持,可下载其DEMO版,链接如下:
https://www.vector.com/cn/zh/download/?tx_vecdownload_downloaddetail%5Bdownload%5D=89817
通过邮箱收到的激活码进行下载。
2. CANoe介绍
CANoe是Vector公司设计的一款用于ECU总线实时仿真、分析、测试及诊断等的开发工具,涉及总线开发的整个过程。目前已支持多种总线,如:CAN、LIN、FlexRay、MOST及Ethernet等。
CANoe在整个ECU开发过程中主要有三大作用:
(1)全仿真阶段
在总线开发的初期,构建ECU的仿真模型,根据仿真节点来对整个ECU进行评估,对其节点功能的完整性及其网络的准确合理性进行前期验证。
(2)半仿真阶段(真实ECU与仿真ECU共存)
根据对第一阶段设计的ECU节点功能验证完成后,用自己开发的真实ECU节点替换掉之前的仿真节点,来对其功能进行进一步验证。
(3)全真实阶段
在开发的过程中,所有仿真节点都会被真实的ECU节点一一代替,最终实现全真实节点的总线网络系统。在真实的网络系统中,可以验证所有节点的功能是否满足需求及总线的负载率,并进行后续的测试及诊断等工作。
3.CANoe软件主界面介绍
打开CANoe的主界面,如下图所示。
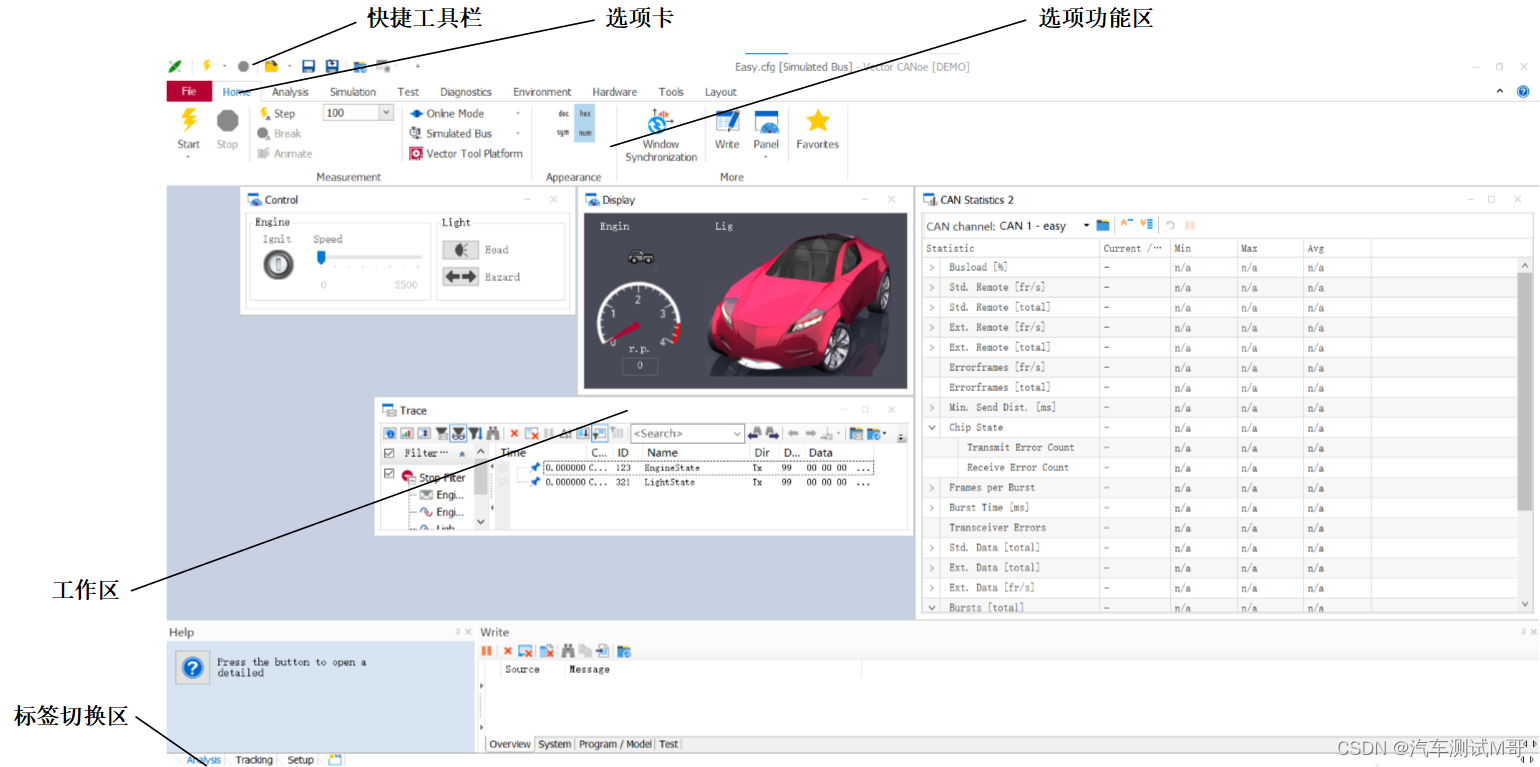
对于主界面的各个选项卡及功能区下节会做详细介绍!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)