pwm方波输出
文章目录
- pwm方波输出
- 前言
- pwm是什么
- 蓝桥桥杯是怎么考pwm输出的
- 具体步骤
-
- #修改代码
- 时钟和GPIO
- 输出频率的初始化
- 不同占空比的pwm波输出
- 验证程序是否工作
- 总结(重要)
-
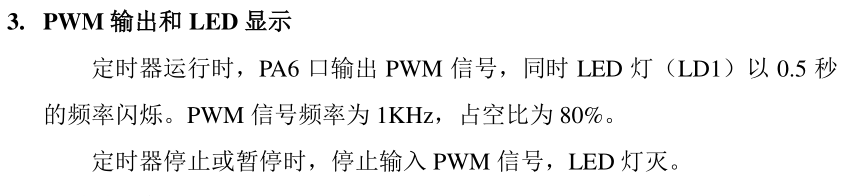
前言
近些年来,蓝桥杯嵌入式的考察越来越注重逻辑的设计,硬件部分代码量也逐渐增多,这就对如何快速地完成外设部分的程序提出了挑战。
下面,带大家利用官方的外设参考例程来快速完成自己的代码。这篇文章讲的是常用的外设,pwm。
pwm是什么
脉宽调制(PWM)基本原理:控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等但宽度不一致的脉冲,用这些脉冲来代替正弦波或所需要的波形。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少。按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。想必大家都有一定的程序设计基础,这里就不过多介绍了。
简而言之,我们的目的是要快速输出占空比和频率可调的方波。
蓝桥桥杯是怎么考pwm输出的
这里给出往年的考法


具体步骤
为了快速的的完成代码,我们对官方的例程来进行修改。
官方库中的标准例程
意法半导体的标准外设库,在赛点资源包的位置

官方给的例程在如下路径
6-STM32固件库代码V3.5版\stm32f10x_stdperiph_lib\STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples

我们要使用的pwm输出在TIM文件夹中 如下路径
STM32F10x_StdPeriph_Lib_V3.5.0\Project\STM32F10x_StdPeriph_Examples\TIM\PWM_Output
找到main.c修改车pwm.c,然后加入到工程之中。
完整源代码如下
#include "stm32f10x.h"
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
uint16_t CCR1_Val = 333;
uint16_t CCR2_Val = 249;
uint16_t CCR3_Val = 166;
uint16_t CCR4_Val = 83;
uint16_t PrescalerValue = 0;
void RCC_Configuration(void);
void GPIO_Configuration(void);
int main(void)
{
RCC_Configuration();
GPIO_Configuration();
PrescalerValue = (uint16_t) (SystemCoreClock / 24000000) - 1;
TIM_TimeBaseStructure.TIM_Period = 665;
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR2_Val;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR3_Val;
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR4_Val;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
TIM_Cmd(TIM3, ENABLE);
while (1)
{}
}
void RCC_Configuration(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |
RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
#ifdef STM32F10X_CL
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
#else
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_Init(GPIOB, &GPIO_InitStructure);
#endif
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t* file, uint32_t line)
{
while (1)
{}
}
#endif
代码主体由三个函数够成
RCC_Configuration();
负责初始化使用到的时钟3
GPIO_Configuration();
负责负责GPIO的初始化
int main()
负责总的pwm初始化,调用前两个函数
还有部分代码是
#ifdef USE_FULL_ASSERT
包含起来的部分,删不删都没有影响。
#修改代码
时钟和GPIO
在官方开发板,ct117e这块板子上会用到的GPIO口有PA6PA7
分别对应TIM3的通道1和通道2
在上面代码里面,刚好会初始化到这两个口和对应的时钟,所以这一部分我们不需要改动都行。
输出频率的初始化
pwm输出频率的计算公式
freq= SystemCoreClock / ((TIM_Period+1)*(TIM_Prescaler +1))-1
eg: 假设我要PWM波的TIM3以2KHZ的频率运行(系统时钟 = 72MHZ)
且此时我们把arr = 99(即百分制),要输出频率,可以用频率做参数,代入上公式可计算出预分频的值
PrescalerValue = (uint16_t) (SystemCoreClock / 100/freq) - 1;
TIM_TimeBaseStructure.TIM_Period = 665;
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;
为了能方便修改频率,我们将需要的频率作为参数输入函数中即可
将函数修改成如下代码
void pwm_init(u16 freq)
{
RCC_Configuration();
GPIO_Configuration();
PrescalerValue = (uint16_t) (SystemCoreClock / 100/freq) - 1;
TIM_TimeBaseStructure.TIM_Period =99;
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR2_Val;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR3_Val;
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR4_Val;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
TIM_Cmd(TIM3, ENABLE);
}
有两处值得注意
将频率作为参数传人函数
删除函数底部的while(1)空循环,避免程序卡在此处
不同占空比的pwm波输出
使用函数
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
这里setCompare1里的1是指通道,1就是通道1,同样的TIM_SetCompare2就是设置通道2的占空比。
在初始化程序完成后使用TIM_SetCompare1可以设置PA6的占空比,TIM_SetCompare2可以设置PA7的占空比
eg:设置PA6的占空比为60 % :TIM_SetCompare1(TIM3,60);
//前提的配置是TIM_TimeBaseStructure.TIM_Period=99;这样比较好计算占空比,即输入的参数就是占空比,输入参数为0可以视为不输出。初始化函数末尾,可使用TIM_SetCompare1(TIM3,0)使板子先不输出方波;
进一步了解周期和频率的改变方法,可以参考下这篇文章
练习STM32动态更改PWM波频率和占空比
验证程序是否工作
在考场上可以要示波器,其实也可以自己用keil的仿真来看是否输出了pwm波,仿真方法如下,同时也适用于GPIO口状态的仿真。
- 进入仿真,魔术棒点开,找到Debug项,勾选 Use simulator 使用仿真

然后退出来,工具栏中点开仿真 
- 打开这个,逻辑分析

如图:

- 点击setup,设置要监测的GPIO口,eg:输入PORTA.6 监测PA6
输入后是这个样子

- 右键,将模式换为bit

即可观测输出方波
总结(重要)
调用(关键部分)
将PWM_Output文件夹中的mian.c文件复制到工程中,改名成pwm.c。
将函数头 int mian()改为void pwm_init((u16 freq),同时将函数中的while(1)空循环删去。
在自己的主函数中调用pwm_init(freq),初始化频率,使用TIM_SetComparex来改变占空比。
修改后的完整代码如下
pwm.c
#include "stm32f10x.h"
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
uint16_t CCR1_Val = 333;
uint16_t CCR2_Val = 249;
uint16_t CCR3_Val = 166;
uint16_t CCR4_Val = 83;
uint16_t PrescalerValue = 0;
void RCC_Configuration(void);
void GPIO_Configuration(void);
void pwm_init(u16 freq)
{
RCC_Configuration();
GPIO_Configuration();
PrescalerValue = (uint16_t) (SystemCoreClock / 100/freq) - 1;
TIM_TimeBaseStructure.TIM_Period = 99;
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR2_Val;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR3_Val;
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR4_Val;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
TIM_Cmd(TIM3, ENABLE);
}
void RCC_Configuration(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |
RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
#ifdef STM32F10X_CL
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
#else
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_Init(GPIOB, &GPIO_InitStructure);
#endif
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t* file, uint32_t line)
{
while (1)
{}
}
#endif
函数额外初始化了别的GPIO口,要精简的可以注意下。
调用举例
main.c中初始化:

然后使用:

设置通道二的占空比。然后仿真就可以看到输出的方波了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)