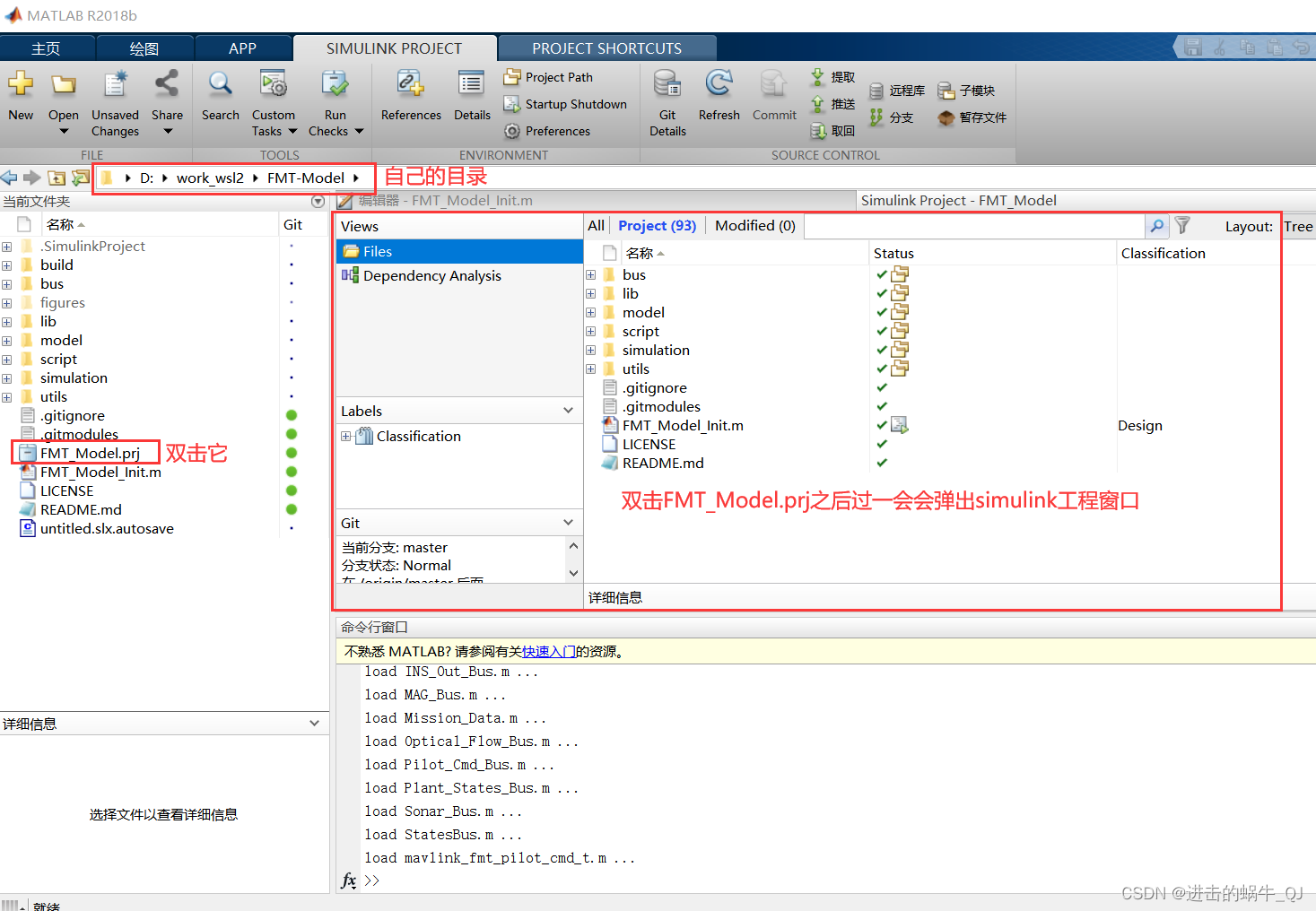
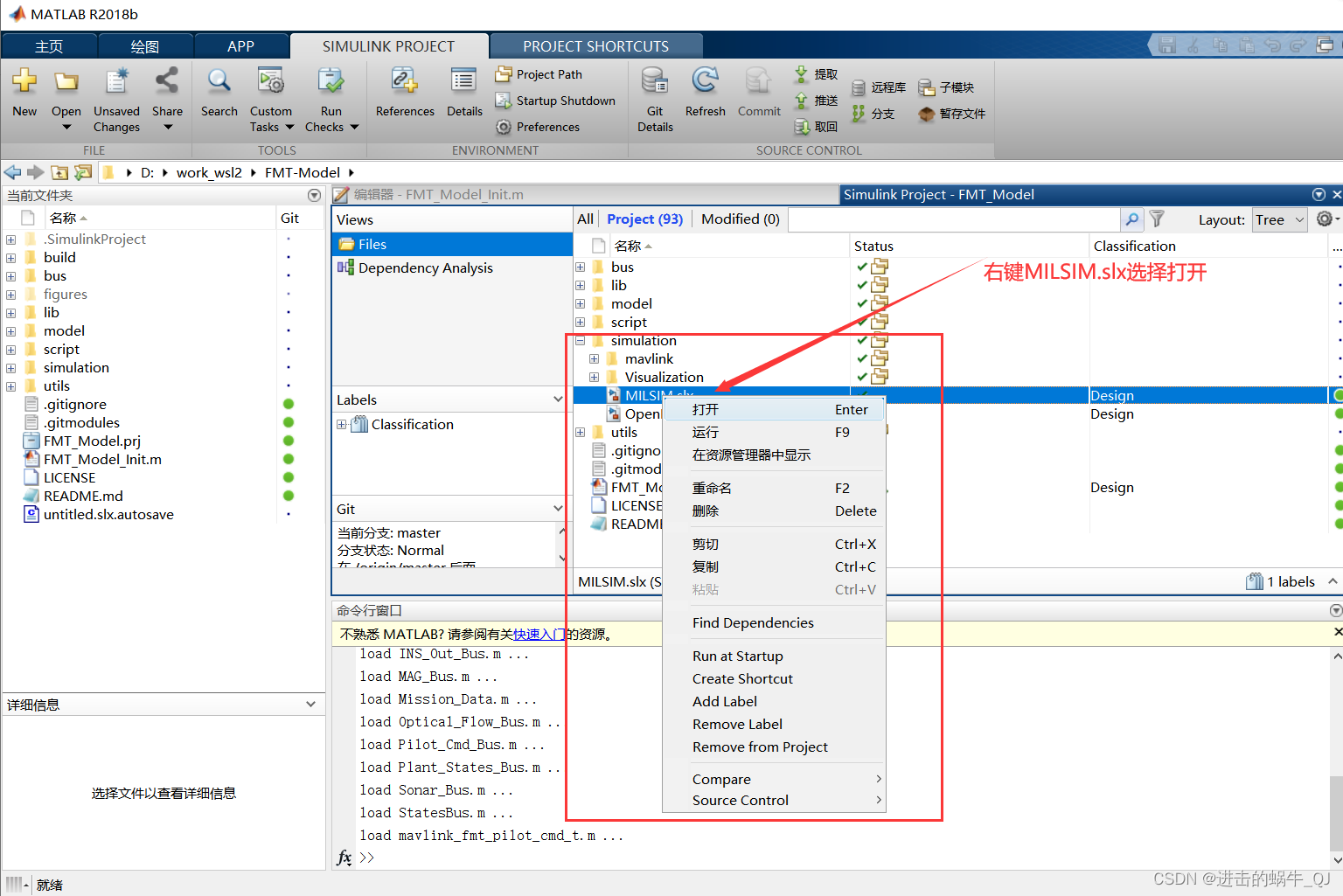
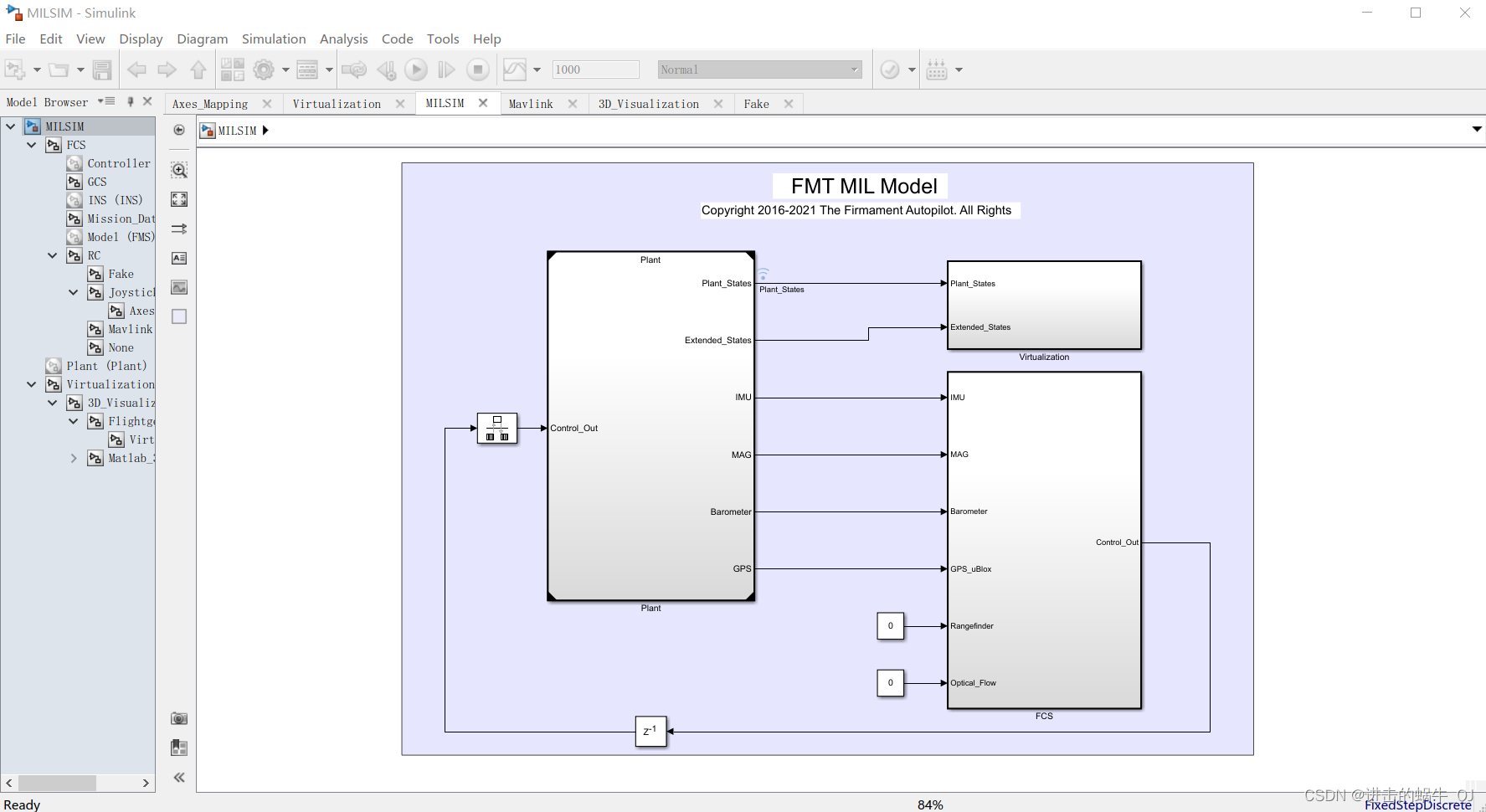
打开之后显示如下:
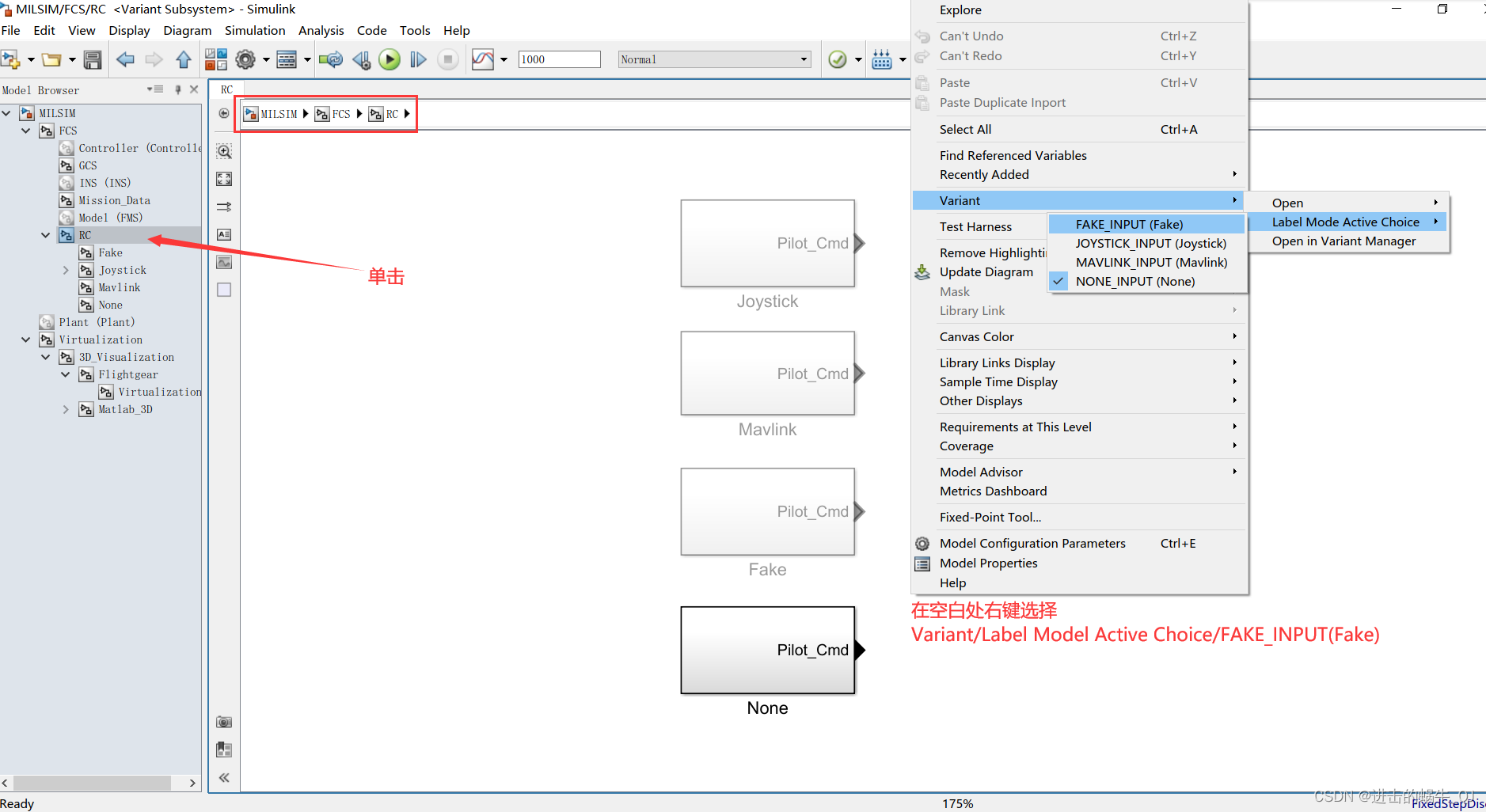
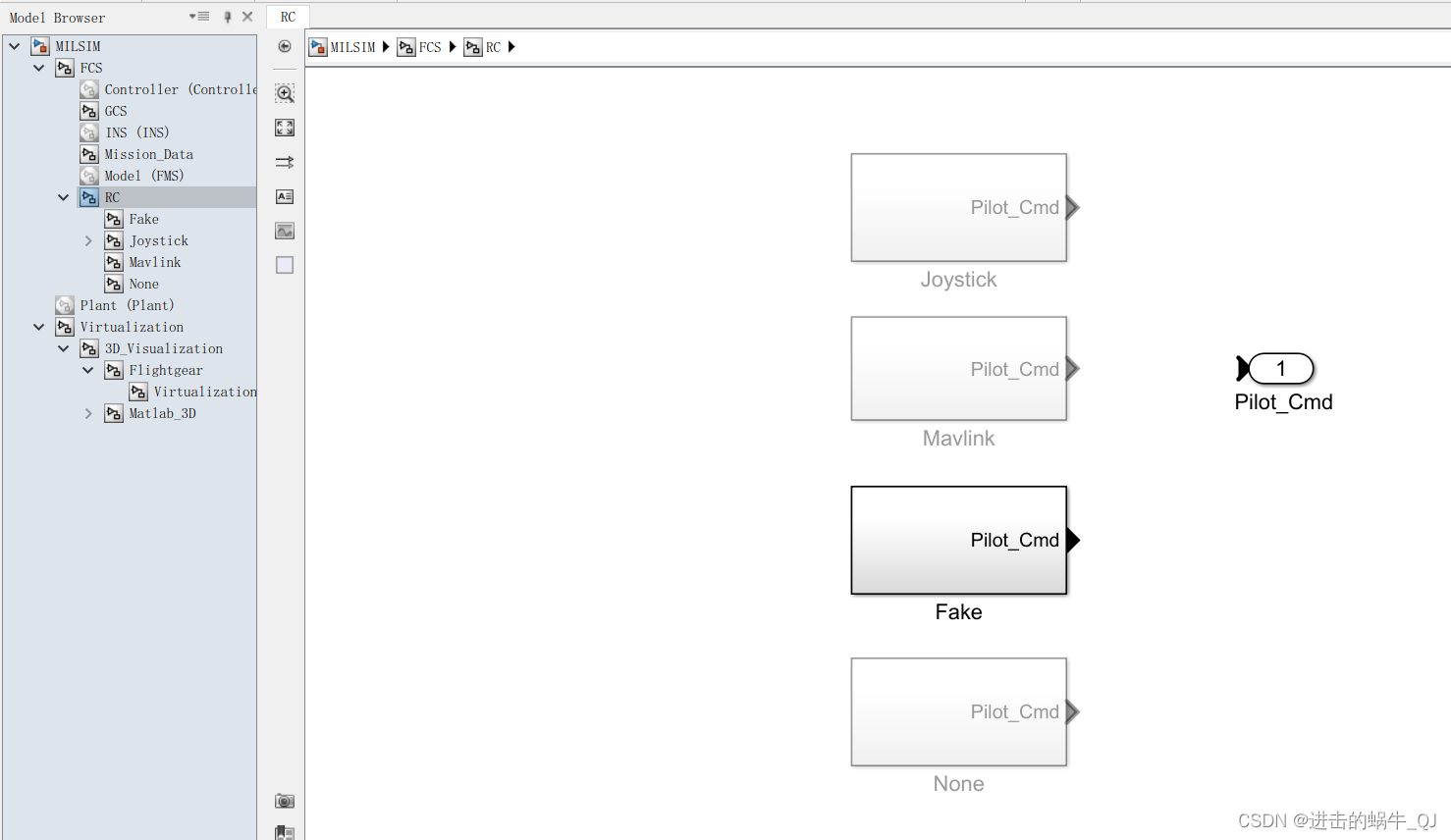
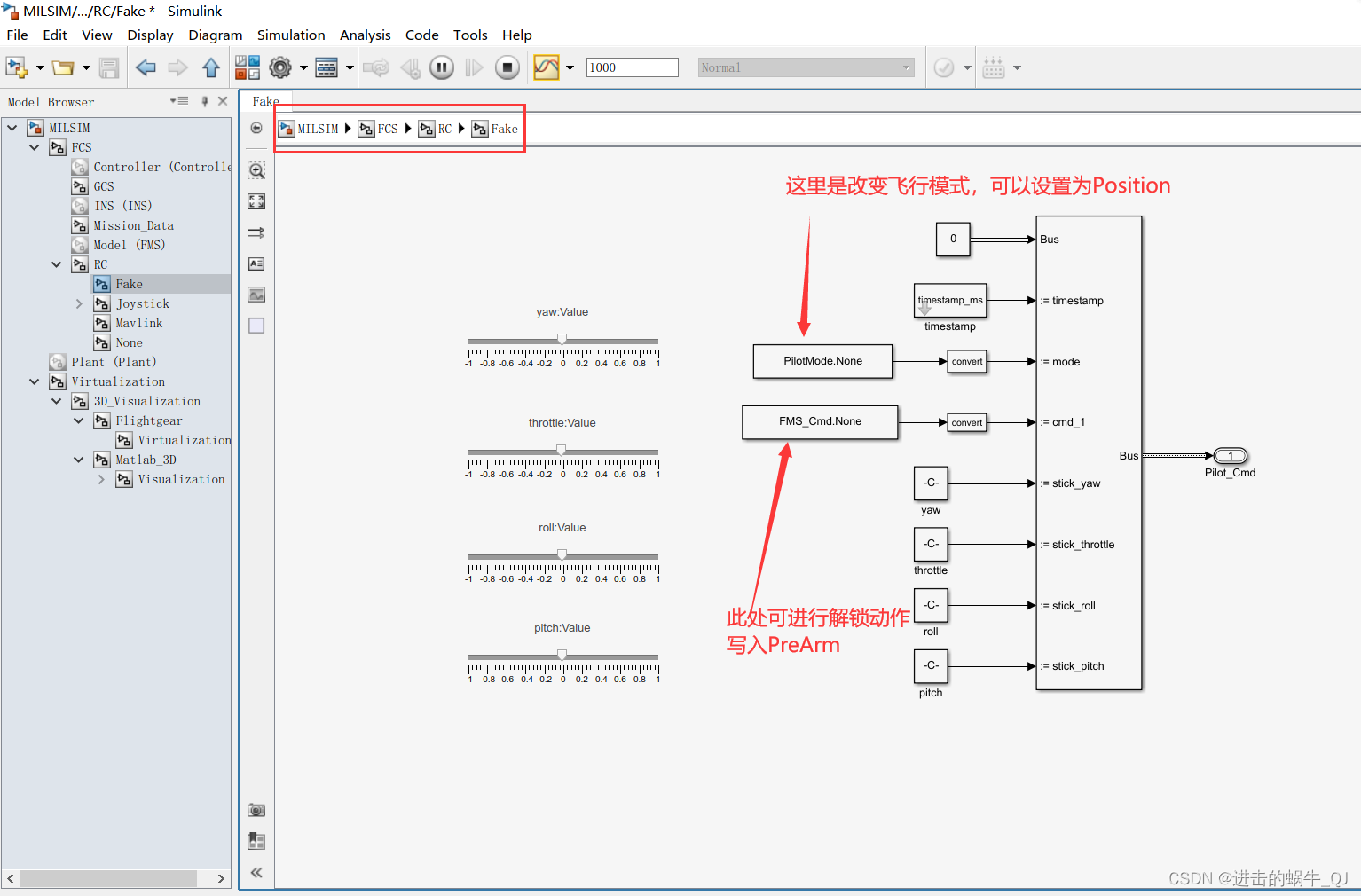
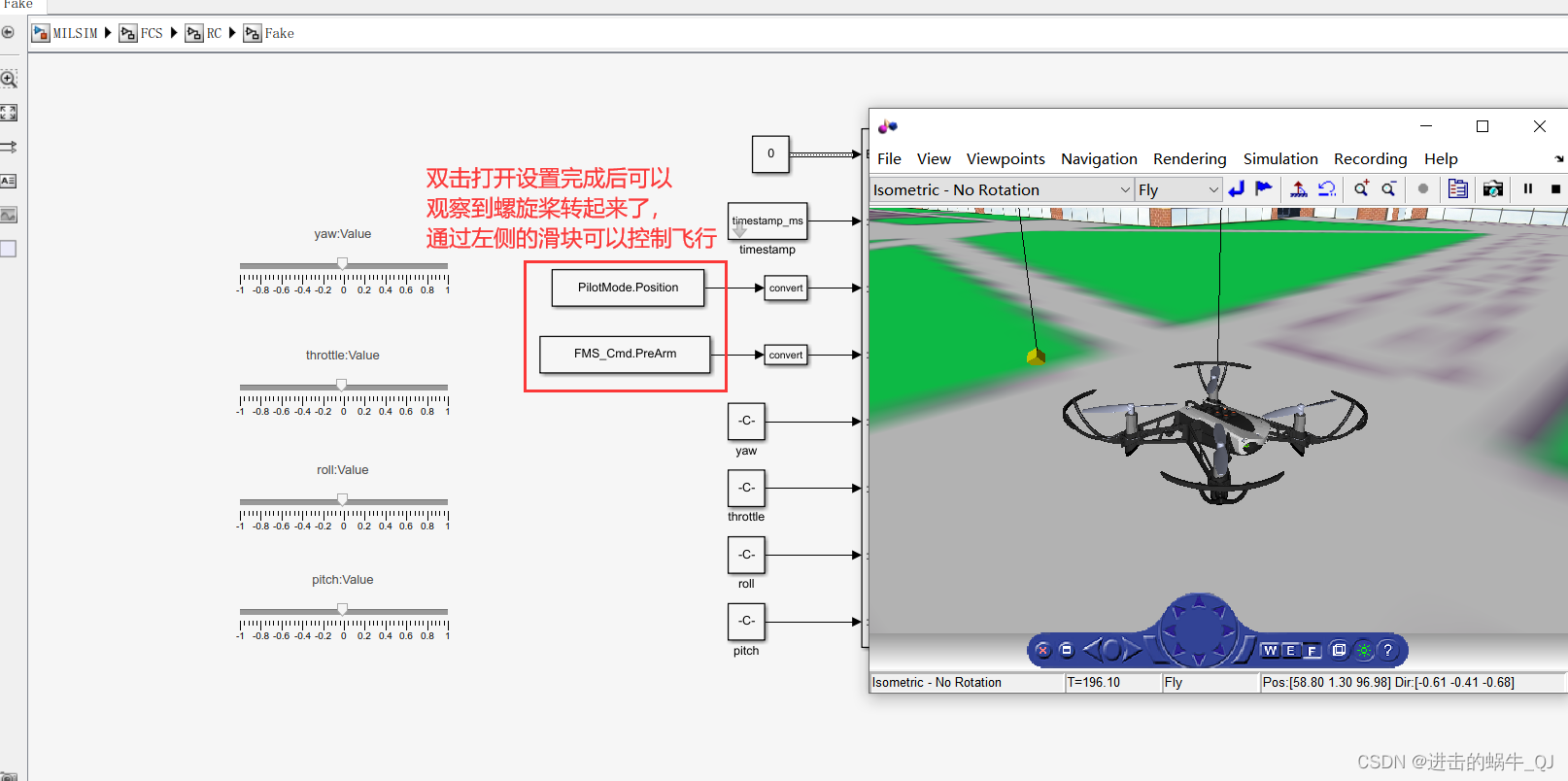
选择遥控输入源。 左键单击 RC 模块并在空白处右键选择 Variant->Label Model Active Choice。 Joystick:外部的手柄遥控杆控制 Mavlink:通过mavlink消息控制 Fake:通过滑块控制飞机 None:通过GCS模块控制 这里主要说明Fake控制的方法。 设置完成如图所示:
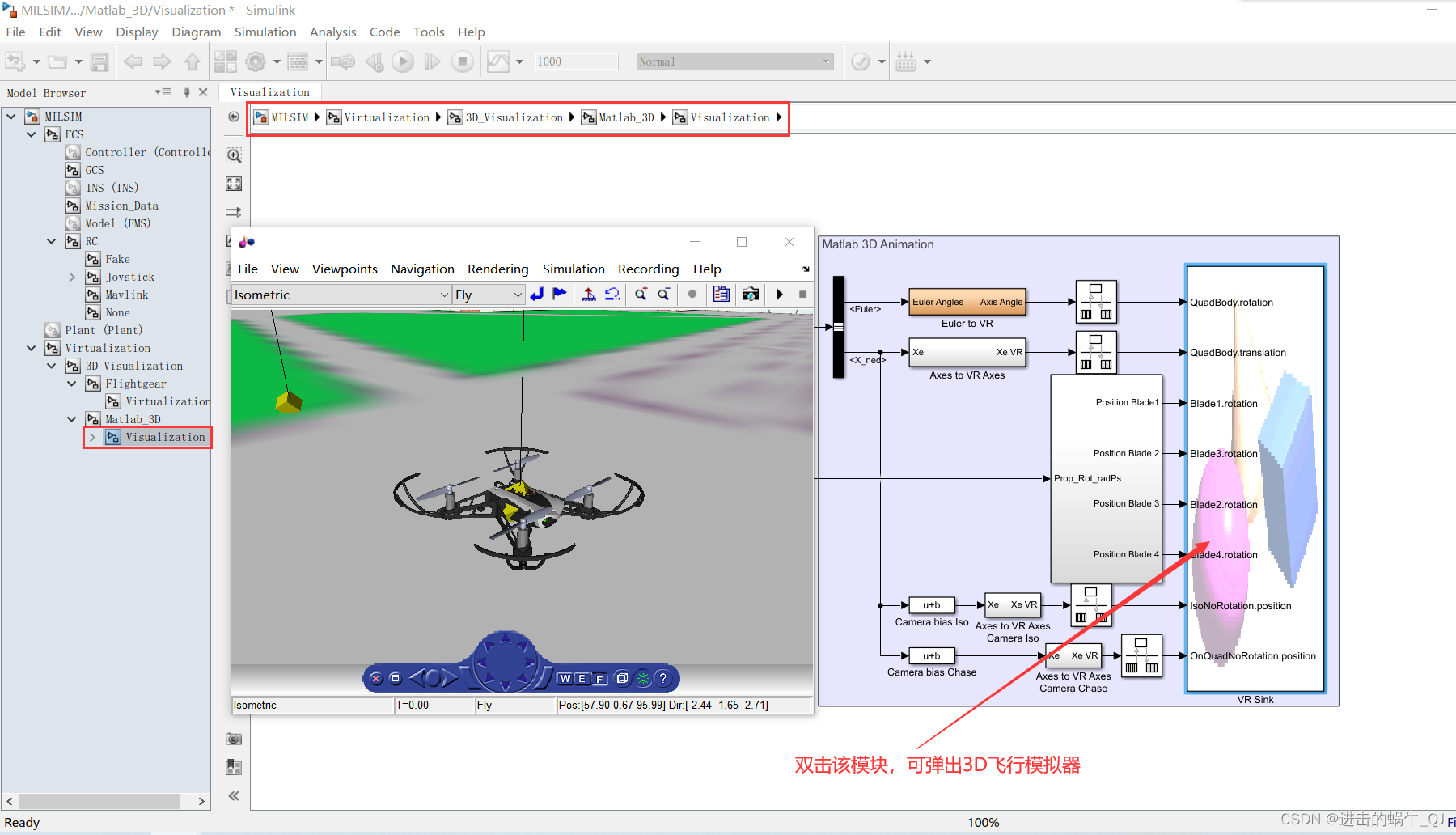
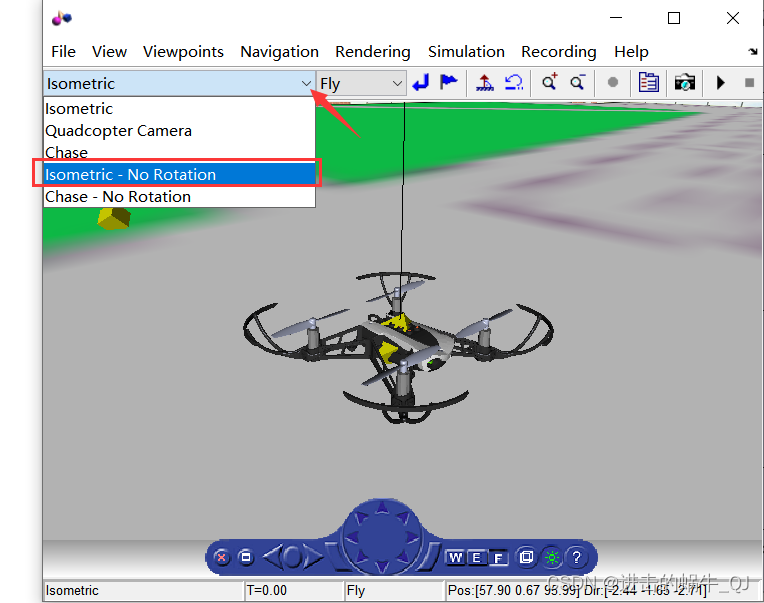
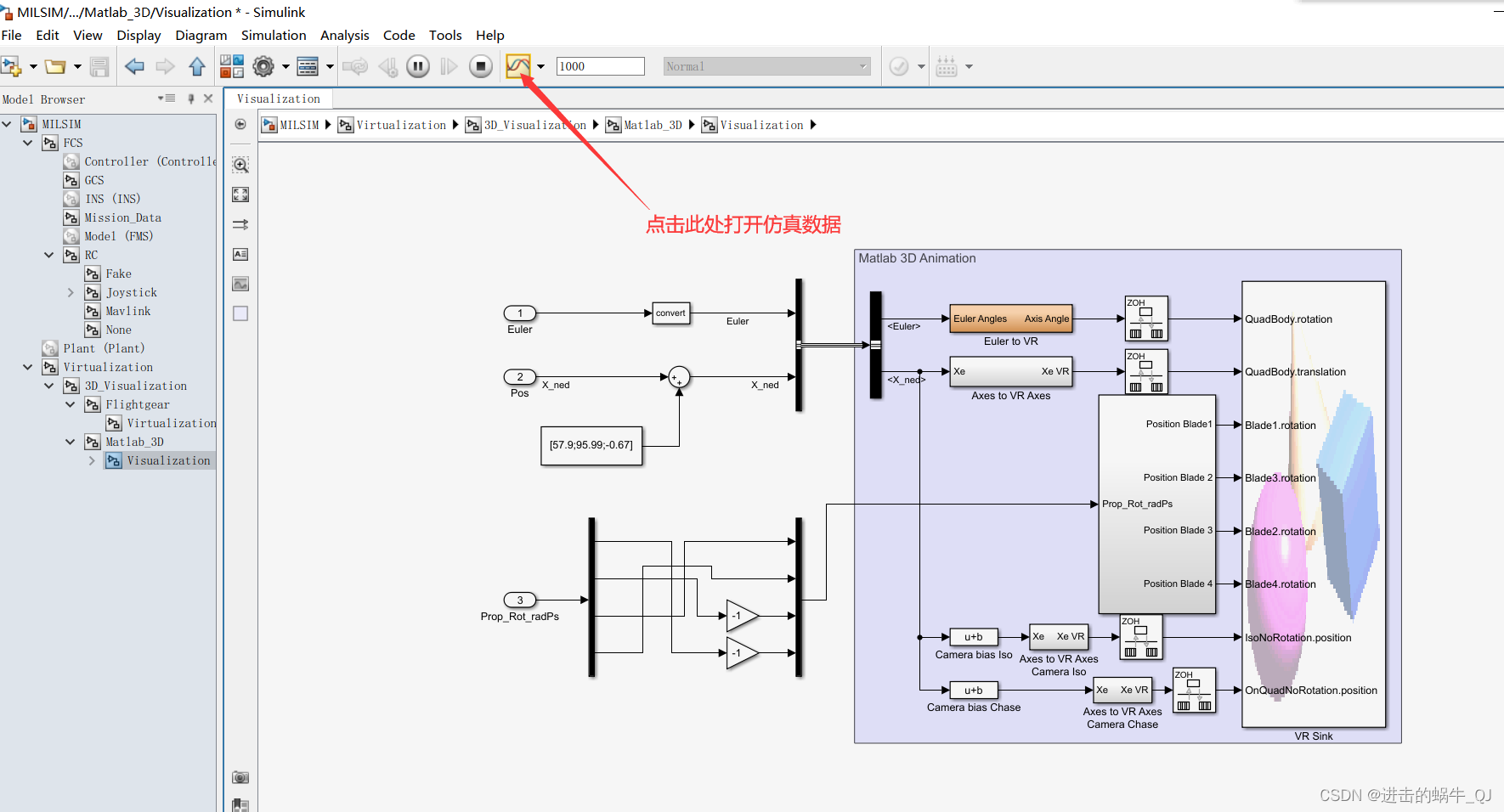
打开可视化模块 打开MILSIM/Virtualization/3D_Visualization/Matlab_3D/Visualization/VR Sink。 将 viewpoint 设置为 Isometric - No Rotation。
点击 Run 按钮开始仿真。
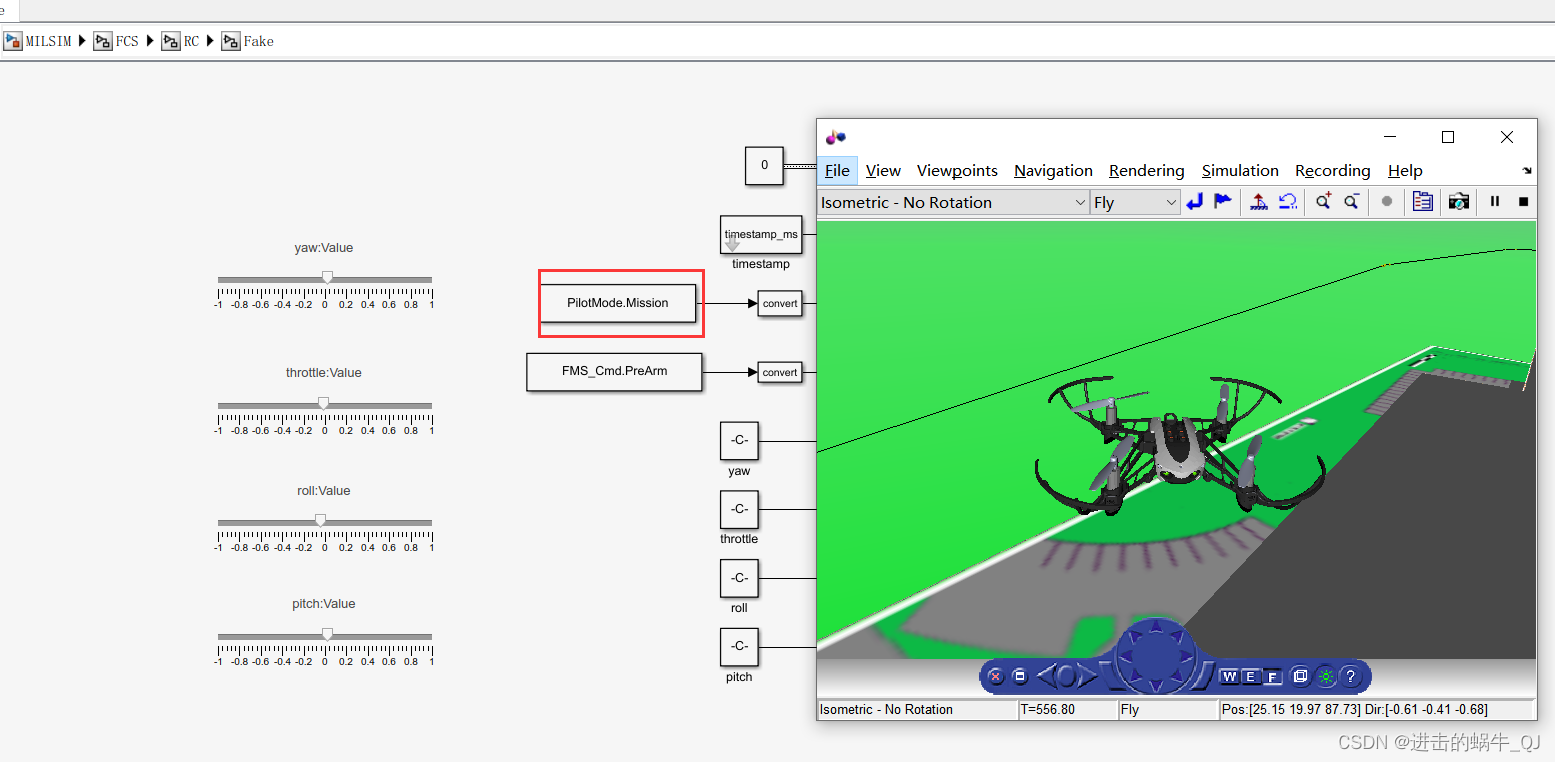
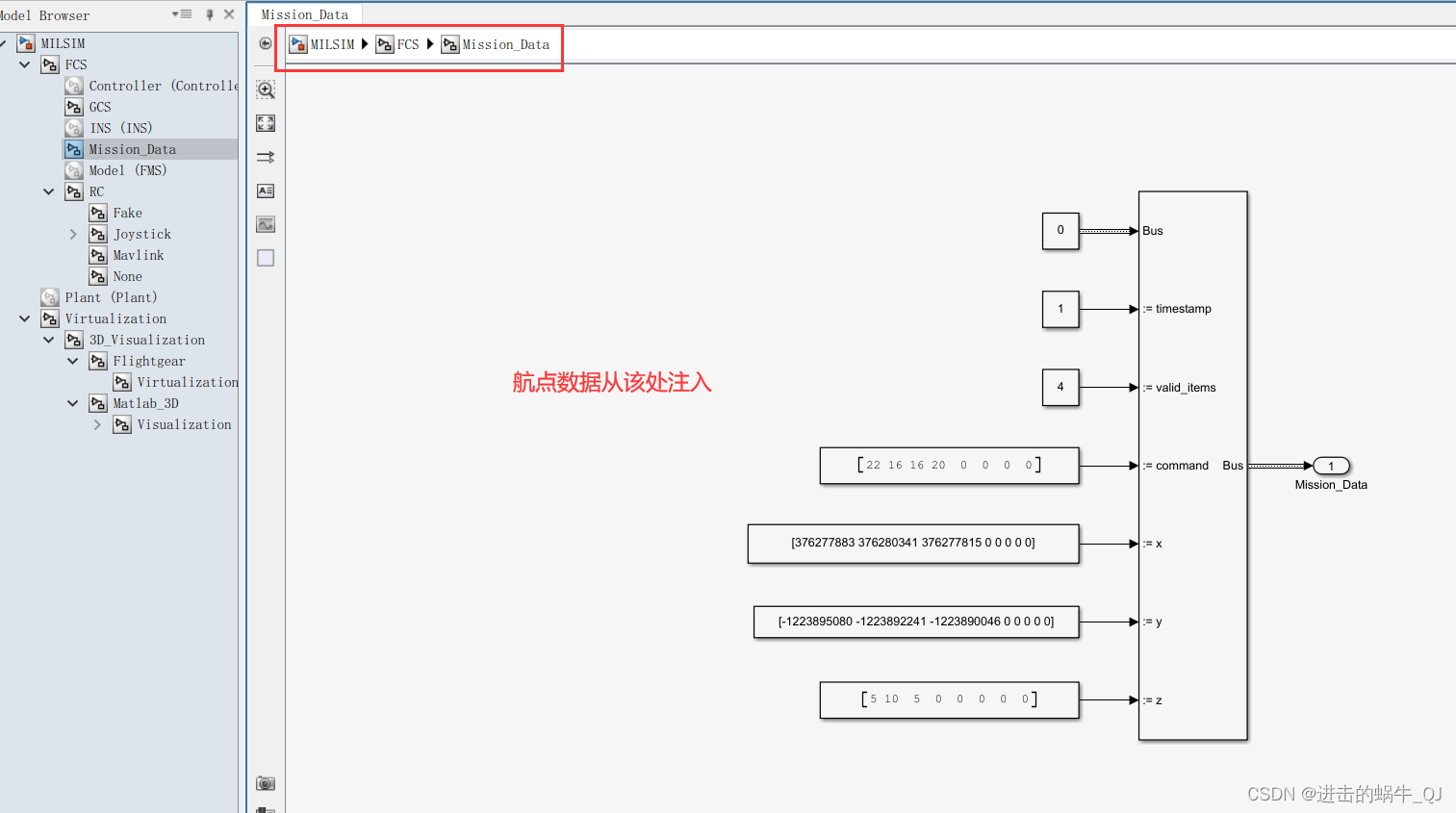
通过滑块控制飞机飞行 解锁后尽快滑动油门滑块(throttle)起飞,否则时间长了会导致自动上锁。 控制飞行器向前飞行 设置模式为航线模式,飞行器根据航点进行飞行
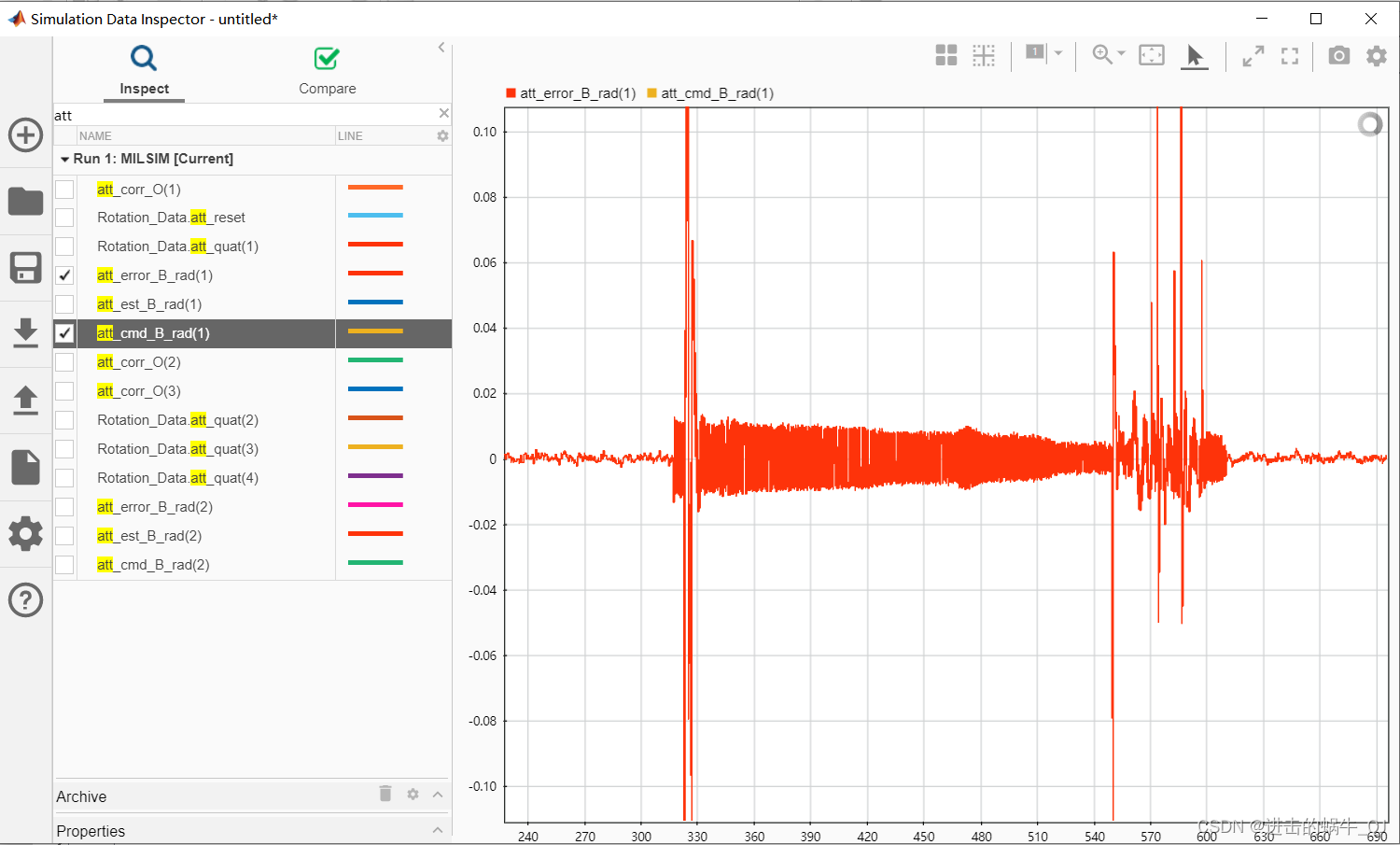
仿真完成后,打开 Simulation Data Inspector 查看仿真数据。 查看数据