运算放大器-虚短虚断
虚短虚断
- 虚短
虚短指在理想情况下,两个输入端的电位相等,就好像两个输入端短接在一起,但事实上并没有短接,称为“虚短”。虚短的必要条件是运放引入深度负反馈。
V+ = V-
- 虚断
虚断指在理想情况下,流入集成运算放大器输入端电流为零。这是由于理想运算放大器的输入电阻无限大,就好像运放两个输入端之间开路。但事实上并没有开路,称为“虚断”。
参考实例
反向放大器
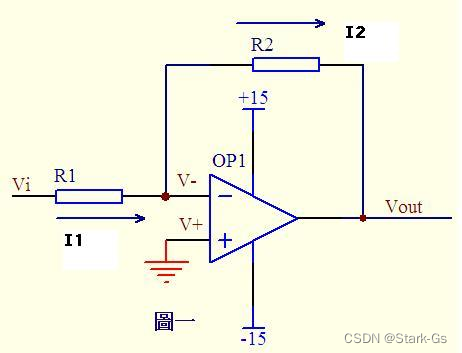
图一中运放的同向端接地=0V,反向端和同向端虚短,所以也是0V,反向输入端输入电阻很高,虚断,几乎没有电流注入和流出,那么R1和R2相当于是串联的,流过一个串联电路中的每一只组件的电流是相同的,即流过R1的电流和流过R2的电流是相同的。
流过R1的电流:I1 = (Vi - V-)/R1 ……a
流过R2的电流:I2 = (V- - Vout)/R2 ……b
虚短:V- = V+ = 0 ……c
虚断: I1 = I2 ……d
求解上面的代数方程得反向放大器的输入输出关系式
Vout = (-R2/R1)*Vi
同向放大器
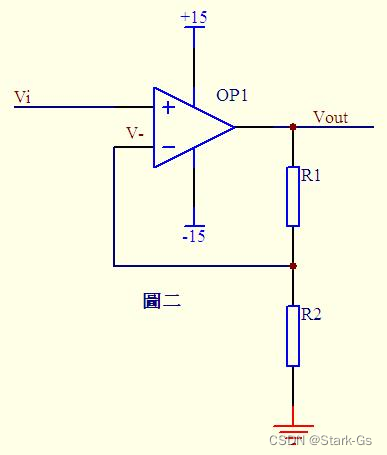
图二中Vi与V-虚短,则 Vi = V- ……a
虚断,反向输入端没有电流输入输出,通过R1和R2 的电流相等,设此电流为I,
由欧姆定律得: I = Vout/(R1+R2) ……b
Vi等于R2上的分压, 即:Vi = I*R2 ……c
由abc式得Vout=Vi*(R1+R2)/R2 这就是传说中的同向放大器的公式了。
加法器1
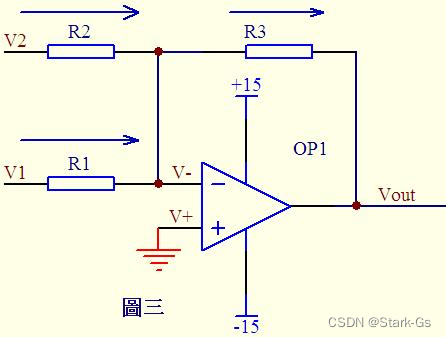
图三中,由虚短知: V- = V+ = 0 ……a
由虚断及基尔霍夫定律知,通过R2与R1的电流之和等于通过R3的电流,
故 (V1 – V-)/R1 + (V2 – V-)/R2 = (Vout – V-)/R3 ……b
代入a式,b式变为V1/R1 + V2/R2 = Vout/R3
如果取R1=R2=R3,则上式变为Vout=V1+V2,这就是传说中的加法器了。
加法器2
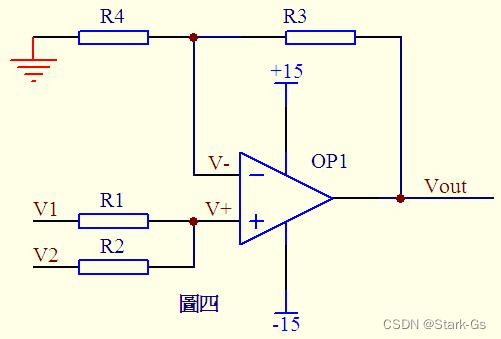
图四由虚断知,运放同向端没有电流流过,则流过R1和R2的电流相等,同理流过R4和R3的电流也相等。
故 (V1 – V+)/R1 = (V+ - V2)/R2 ……a
(Vout – V-)/R3 = V-/R4 ……b
由虚短知: V+ = V- ……c ,
如果R1=R2,R3=R4
则由以上式子可以推导出 V+ = (V1 + V2)/2 V- = Vout/2
故 Vout = V1 + V2 也是一个加法器
减法器
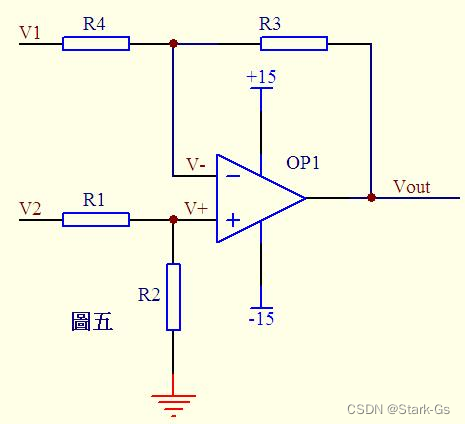
图五由虚断知,通过R1的电流等于通过R2的电流,同理通过R4的电流等于R3的电流,
故有 (V2 – V+)/R1 = V+/R2 ……a
(V1 – V-)/R4 = (V- - Vout)/R3 ……b
如果R1=R2, 则V+ = V2/2 ……c
如果R3=R4, 则V- = (Vout + V1)/2 ……d
由虚短知 V+ = V- ……e 所以 Vout=V2-V1 这就是传说中的减法器了。
积分电路
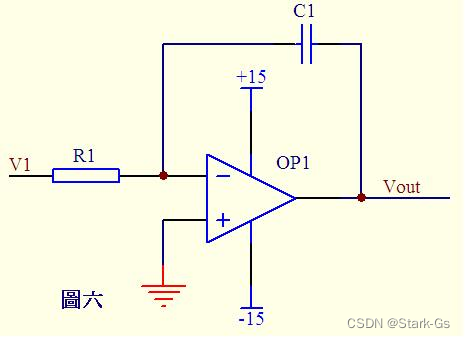
图六由虚短知,反向输入端的电压与同向端相等。
由虚断知,通过R1的电流与通过C1的电流相等。
通过R1的电流 i=V1/R1
通过C1的电流i=C*dUc/dt=-C*dVout/dt
所以 Vout=((-1/(R1*C1))∫V1dt
输出电压与输入电压对时间的积分成正比,这就是传说中的积分电路了。
若V1为恒定电压U,则上式变换为Vout = -U*t/(R1*C1) t 是时间,
则Vout输出电压是一条从0至负电源电压按时间变化的直线
微分电路
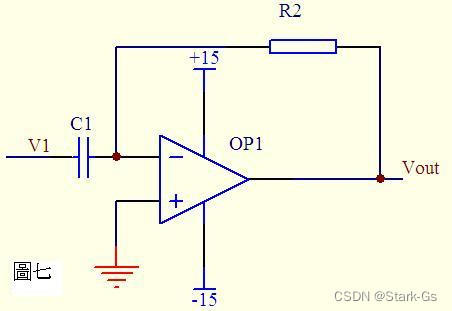
图七中由虚断知,通过电容C1和电阻R2的电流是相等的,
由虚短知,运放同向端与反向端电压是相等的。
则: Vout = -i * R2 = -(R2*C1)dV1/dt 这是一个微分电路。
如果V1是一个突然加入的直流电压,则输出Vout对应一个方向与V1相反的脉冲。
差分放大电路
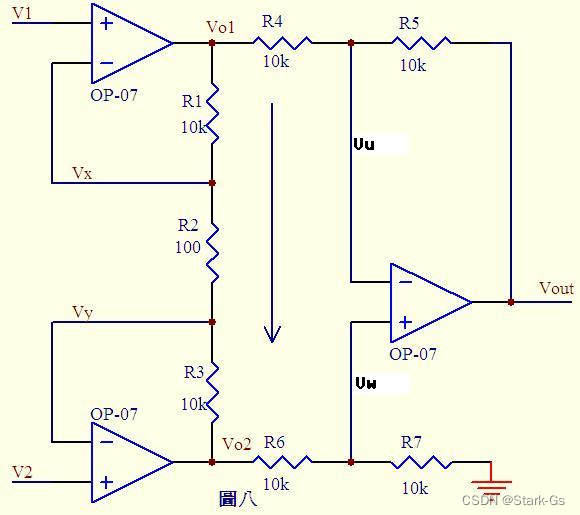
图八由虚短知
Vx = V1 ……a
Vy = V2 ……b
由虚断知,运放输入端没有电流流过,则R1、R2、R3可视为串联,通过每一个电阻的电流是相同的,
电流I=(Vx-Vy)/R2 ……c
则: Vo1-Vo2=I*(R1+R2+R3) = (Vx-Vy)(R1+R2+R3)/R2 ……d
由虚断知,流过R6与流过R7的电流相等,若R6=R7,
则Vw = Vo2/2 ……e
同理若R4=R5,则Vout – Vu = Vu – Vo1,故Vu = (Vout+Vo1)/2 ……f
由虚短知,Vu = Vw ……g
由efg得 Vout = Vo2 – Vo1 ……h
由dh得 Vout = (Vy –Vx)(R1+R2+R3)/R2 上式中(R1+R2+R3)/R2是定值,
此值确定了差值(Vy –Vx)的放大倍数。 这个电路就是传说中的差分放大电路了。
电流检测电路
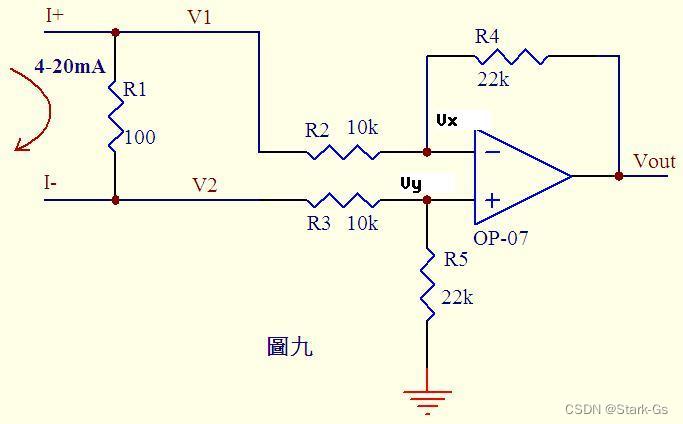
分析一个大家接触得较多的电路。很多控制器接受来自各种检测仪表的0~ 20mA或4~ 20mA电流,
电路将此电流转换成电压后再送ADC转换成数字信号,图九就是这样一个典型电路。
如图4~ 20mA电流流过采样100Ω电阻R1,在R1上会产生0.4~ 2V的电压差。
由虚断知,运放输入端没有电流流过,则流过R3和R5的电流相等,流过R2和R4的电流相等。
故: (V2-Vy)/R3 = Vy/R5 ……a
(V1-Vx)/R2 = (Vx-Vout)/R4 ……b
由虚短知: Vx = Vy ……c
电流从0~ 20mA变化,则V1 = V2 + (0.4~ 2) ……d
由cd式代入b式得(V2 + (0.4~ 2)-Vy)/R2 = (Vy-Vout)/R4 ……e
如果R3=R2,R4=R5,则由e-a得Vout = -(0.4~ 2)R4/R2 ……f
图九中R4/R2=22k/10k=2.2,则f式Vout = -(0.88~ 4.4)V,即是说,
将4~20mA电流转换成了-0.88 ~ -4.4V电压,此电压可以送ADC去处理。
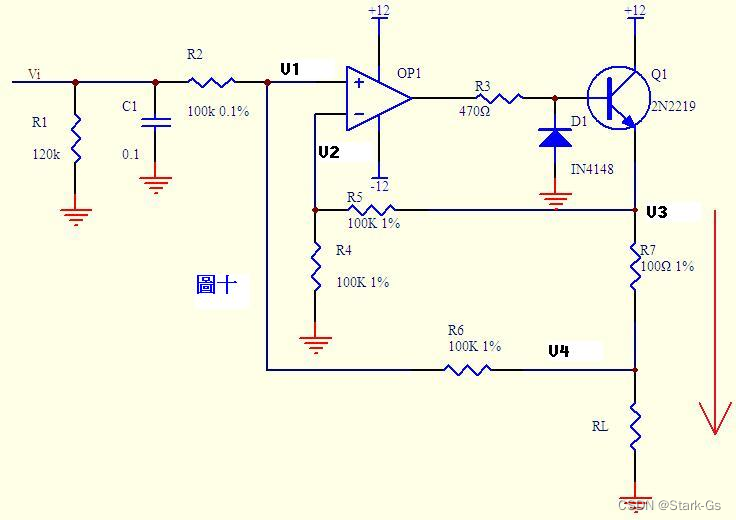
电流可以转换成电压,电压也可以转换成电流。图十就是这样一个电路。上图的负反馈没有通过电阻直接反馈,而是串联了三极管Q1的发射结,大家可不要以为是一个比较器就是了。只要是放大电路,虚短虚断的规律仍然是符合的!
由虚断知,运放输入端没有电流流过,
则 (Vi – V1)/R2 = (V1 – V4)/R6 ……a
同理 (V3 – V2)/R5 = V2/R4 ……b
由虚短知 V1 = V2 ……c
如果R2=R6,R4=R5,则由abc式得V3-V4=Vi
上式说明R7两端的电压和输入电压Vi相等,则通过R7的电流I=Vi/R7,如果负载RL<<100KΩ,则通过Rl和通过R7的电流基本相同。
PT100 前置放大电路
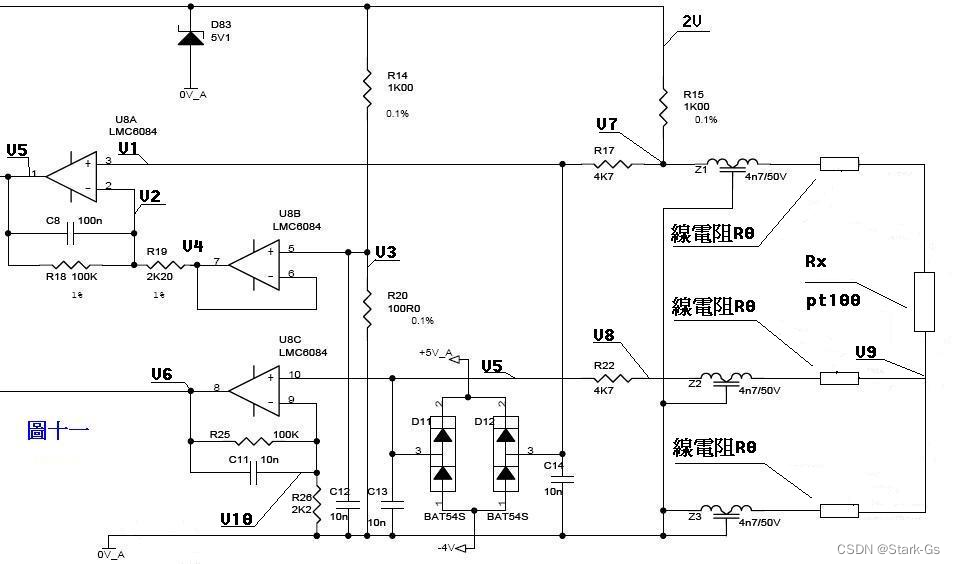
图十一是一个三线制PT100前置放大电路。
PT100传感器引出三根材质、线径、长度完全相同的线,接法如图所示。
有2V的电压加在由R14、R20、R15、Z1、PT100及其线电阻组成的桥电路上。
Z1、Z2、Z3、D11、D12、D83及各电容在电路中起滤波和保护作用,静态分析时可不予理会,
Z1、Z2、Z3可视为短路,D11、D12、D83及各电容可视为开路。
由电阻分压知, V3=2*R20/(R14+20)=200/1100=2/11 ……a
由虚短知,U8B第6、7脚 电压和第5脚电压相等 V4=V3 ……b
由虚断知,U8A第2脚没有电流流过,则流过R18和R19上的电流相等。 (V2-V4)/R19=(V5-V2)/R18 ……c
由虚断知,U8A第3脚没有电流流过, V1=V7 ……d 在桥电路中R15和Z1、PT100及线电阻串联,
PT100与线电阻串联分得的电压通过电阻R17加至U8A的第3脚, V7=2*(Rx+2R0)/(R15+Rx+2R0) …..e
由虚短知,U8A第3脚和第2脚电压相等, V1=V2 ……f 由abcdef得, (V5-V7)/100=(V7-V3)/2.2
化简得 V5=(102.2*V7-100V3)/2.2 即 V5=204.4(Rx+2R0)/(1000+Rx+2R0) – 200/11 ……g
上式输出电压V5是Rx的函数 我们再看线电阻的影响。
Pt100最下端线电阻上产生的电压降经过中间的线电阻、Z2、R22,加至U8C的第10脚,
由虚断知, V5=V8=V9=2*R0/(R15+Rx+2R0) ……a (V6-V10)/R25=V10/R26 ……b
由虚短知, V10=V5 ……c
由式abc得 V6=(102.2/2.2)V5=204.4R0/[2.2(1000+Rx+2R0)] ……h
由式gh组成的方程组知,如果测出V5、V6的值,就可算出Rx及R0,知道Rx,
查pt100分度表就知道温度的大小了。
参考
工控网
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)