K
c
α
T
s
+
1
α
T
s
+
1
=
K
c
s
+
1
T
s
+
1
α
T
(
0
<
α
<
1
)
K_{c} \alpha \frac{T s+1}{\alpha T s+1}=K_{c} \frac{s+\frac{1}{T}}{s+\frac{1}{\alpha T}} \quad(0<\alpha<1)
KcααTs+1Ts+1=Kcs+αT1s+T1(0<α<1)
可以看出,其零点位于
s
=
−
1
/
T
s=-1 / T
s=−1/T,极点位于
s
=
−
/
(
α
T
)
s=-/(\alpha T)
s=−/(αT),所以在复平面,零点总是位于极点的右方。值得注意的是
α
\alpha
α最小值受到超前校正物理结构的限制,通常取0.05左右,这也意味着,超前校正装置可以产生的最大相角超前为
6
5
∘
65^{\circ}
65∘。
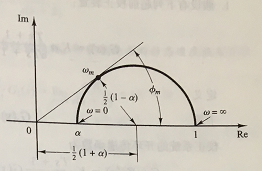
绘制出超前校正传递函数的奈奎斯特曲线(图中
K
c
=
1
K_c=1
Kc=1)
K
c
α
j
ω
T
+
1
j
ω
α
T
+
1
K_{c} \alpha \frac{j \omega T+1}{j \omega \alpha T+1}
KcαjωαT+1jωT+1
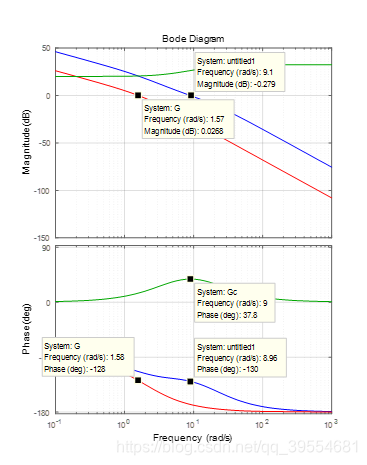
绘出超前校正系统的bode图:(图中
K
c
=
10
,
a
l
p
h
a
=
0.1
,
T
=
0.2
K_c=10,alpha=0.1,T=0.2
Kc=10,alpha=0.1,T=0.2)
可以看出系统的低频幅值趋近于
20
l
g
(
K
c
α
)
20lg(K_c \alpha)
20lg(Kcα),高频幅值趋近于
20
l
g
(
K
c
)
20lg(K_c)
20lg(Kc);
最大超前相角处的频率值为
log
ω
m
=
1
2
(
log
1
T
+
log
1
α
T
)
\log \omega_{m}=\frac{1}{2}\left(\log \frac{1}{T}+\log \frac{1}{\alpha T}\right)
logωm=21(logT1+logαT1)
即
ω
m
=
1
α
T
\omega_{m}=\frac{1}{\sqrt{\alpha} T}
ωm=αT1
对应了两个转角频率的几何中心。
重要: 可以看出,通过合适地选取参数,超前校正环节在中频段为系统带来了超前相角,同时中频段的斜率增加了
+
20
d
B
/
十
倍
频
程
+20dB/十倍频程
+20dB/十倍频程,这将使校正后的系统中频段的幅值下降地更缓,使得系统增益交接频率提高(幅值穿越频率),应当指出,带宽近似于增益交接频率;这意味着系统的闭环带宽增加,快速性会提高,动态性能得到改善,同时超前校正在增加系统穿越频率的同时,保证了系统的相角裕度不会大幅减小(超前校正产生足够大的相角超前,可以补偿原系统中的元件造成的过大的相角滞后)。
例子:
设系统的开环传递函数为
G
(
s
)
=
s
s
(
s
+
2
)
G(s)=\frac{s}{s(s+2)}
G(s)=s(s+2)s,如果要使系统的静态速度误差常数
K
v
K_v
Kv为
20
s
−
1
20s^{-1}
20s−1,相位裕度不小于
5
0
∘
50^{\circ}
50∘,增益裕量不小于
10
d
B
10dB
10dB,试设计一个系统校正装置。
我们采用如下形式的超前校正装置:
G
c
(
s
)
=
K
c
α
T
s
+
1
α
T
s
+
1
=
K
c
s
+
1
T
s
+
1
α
T
(
0
<
α
<
1
)
G_c(s)=K_{c} \alpha \frac{T s+1}{\alpha T s+1}=K_{c} \frac{s+\frac{1}{T}}{s+\frac{1}{\alpha T}} \quad(0<\alpha<1)
Gc(s)=KcααTs+1Ts+1=Kcs+αT1s+T1(0<α<1)
定义:
G
1
(
s
)
=
K
G
(
s
)
=
4
K
s
(
s
+
2
)
G_{1}(s)=K G(s)=\frac{4 K}{s(s+2)}
G1(s)=KG(s)=s(s+2)4K
其中:
K
=
K
c
α
K=K_c \alpha
K=Kcα
首先调整开环增益以满足系统的稳态误差指标;
K
v
=
lim
s
→
0
s
G
c
(
s
)
G
(
s
)
=
lim
s
→
0
s
T
s
+
1
α
T
s
+
1
G
1
(
s
)
=
lim
s
→
0
s
4
K
s
(
s
+
2
)
=
2
K
=
20
K_{v}=\lim _{s \rightarrow 0} s G_{c}(s) G(s)=\lim _{s \rightarrow 0} s \frac{T s+1}{\alpha T s+1} G_{1}(s)=\lim _{s \rightarrow 0} \frac{s 4 K}{s(s+2)}=2 K=20
Kv=s→0limsGc(s)G(s)=s→0limsαTs+1Ts+1G1(s)=s→0lims(s+2)s4K=2K=20
1
α
=
1
0.24
=
1
0.49
=
6.2
d
B
\frac{1}{\sqrt{\alpha}}=\frac{1}{\sqrt{0.24}}=\frac{1}{0.49}=6.2 \mathrm{dB}
α1=0.241=0.491=6.2dB
可知
G
1
(
s
)
G_1(s)
G1(s)在该频率处的幅值应为
−
6.2
d
B
-6.2dB
−6.2dB,解出
ω
=
9
r
a
d
/
s
\omega =9rad/s
ω=9rad/s,即为截止频率
ω
c
\omega_c
ωc;
ω
c
=
1
/
(
α
T
)
\omega_{c}=1 /(\sqrt{\alpha} T)
ωc=1/(αT)
1
T
=
α
ω
c
=
4.41
\frac{1}{T}=\sqrt{\alpha} \omega_{c}=4.41
T1=αωc=4.41
即
1
α
T
=
ω
c
α
=
18.4
\frac{1}{\alpha T}=\frac{\omega_{c}}{\sqrt{\alpha}}=18.4
αT1=αωc=18.4
因此,超前校正系统的传递函数为:
G
c
(
s
)
=
K
c
s
+
4.41
s
+
18.4
=
K
c
α
0.227
s
+
1
0.054
s
+
1
G_{c}(s)=K_{c} \frac{s+4.41}{s+18.4}=K_{c} \alpha \frac{0.227 s+1}{0.054 s+1}
Gc(s)=Kcs+18.4s+4.41=Kcα0.054s+10.227s+1
式中
K
c
=
K
α
=
10
0.24
=
41.7
K_{c}=\frac{K}{\alpha}=\frac{10}{0.24}=41.7
Kc=αK=0.2410=41.7
则有
G
c
(
s
)
=
41.7
s
+
4.41
s
+
18.4
=
10
0.227
s
+
1
0.054
s
+
1
G_{c}(s)=41.7 \frac{s+4.41}{s+18.4}=10 \frac{0.227 s+1}{0.054 s+1}
Gc(s)=41.7s+18.4s+4.41=100.054s+10.227s+1
校正后系统的开环传递函数为:
G
c
(
s
)
G
(
s
)
=
41.7
s
+
4.41
s
+
18.4
4
s
(
s
+
2
)
G_{c}(s) G(s)=41.7 \frac{s+4.41}{s+18.4} \frac{4}{s(s+2)}
Gc(s)G(s)=41.7s+18.4s+4.41s(s+2)4