这里写目录标题
- 0 写在前面
- 1 下载并安装vspd虚拟串口和串口调试助手
-
- 2 用vspd创建两个虚拟端口
- 3 进行串口调试助手和自己做的串口调试助手的通信
- 3.1 统一参数
- 3.2 助手2发送数据
- 3.2.1 发送数据模式为数值模式
- 3.2.2 发送数据模式为字符串模式
- 3.3 助手2接收数据
- 3.3.1 接收数据模式为数值模式
- 3.3.2 接收数据模式为字符串模式
0 写在前面
自己用C#做了一个串口助手,但是苦于没有硬件基础,也不知道该如何测试。翻遍网络,发现一个大神提供了一个思路。原帖在此:如何调试上位机软件与串口进行通信
博主在此将大神的方法进行细化,希望能对您起到一点帮助o( ̄▽ ̄)ブ
1 下载并安装vspd虚拟串口和串口调试助手
bd网盘下载地址在文末~
1.1 vspd虚拟串口安装
- 运行 vspd.exe 进行安装,安装的最后一步取消【现在运行】(我记得是叫Launch啥的);
- 将解压的文件夹中的 vspdctl.dll 文件放入工程目录(安装的目录)中,覆盖原有的同名文件,即完成破解。
1.2 串口调试助手
下载下来就可以直接用,是一个exe文件,无需安装
2 用vspd创建两个虚拟端口
如图

3 进行串口调试助手和自己做的串口调试助手的通信
为表达方便,在此将下载的串口调试助手称为助手1,自己做的称为助手2。
3.1 统一参数
包括波特率、停止位、数据位、奇偶校验位的,两个助手都要统一。我自己做的助手没有停止位、数据位、奇偶校验位的选项,故不需要管这三个参数。
3.2 助手2发送数据
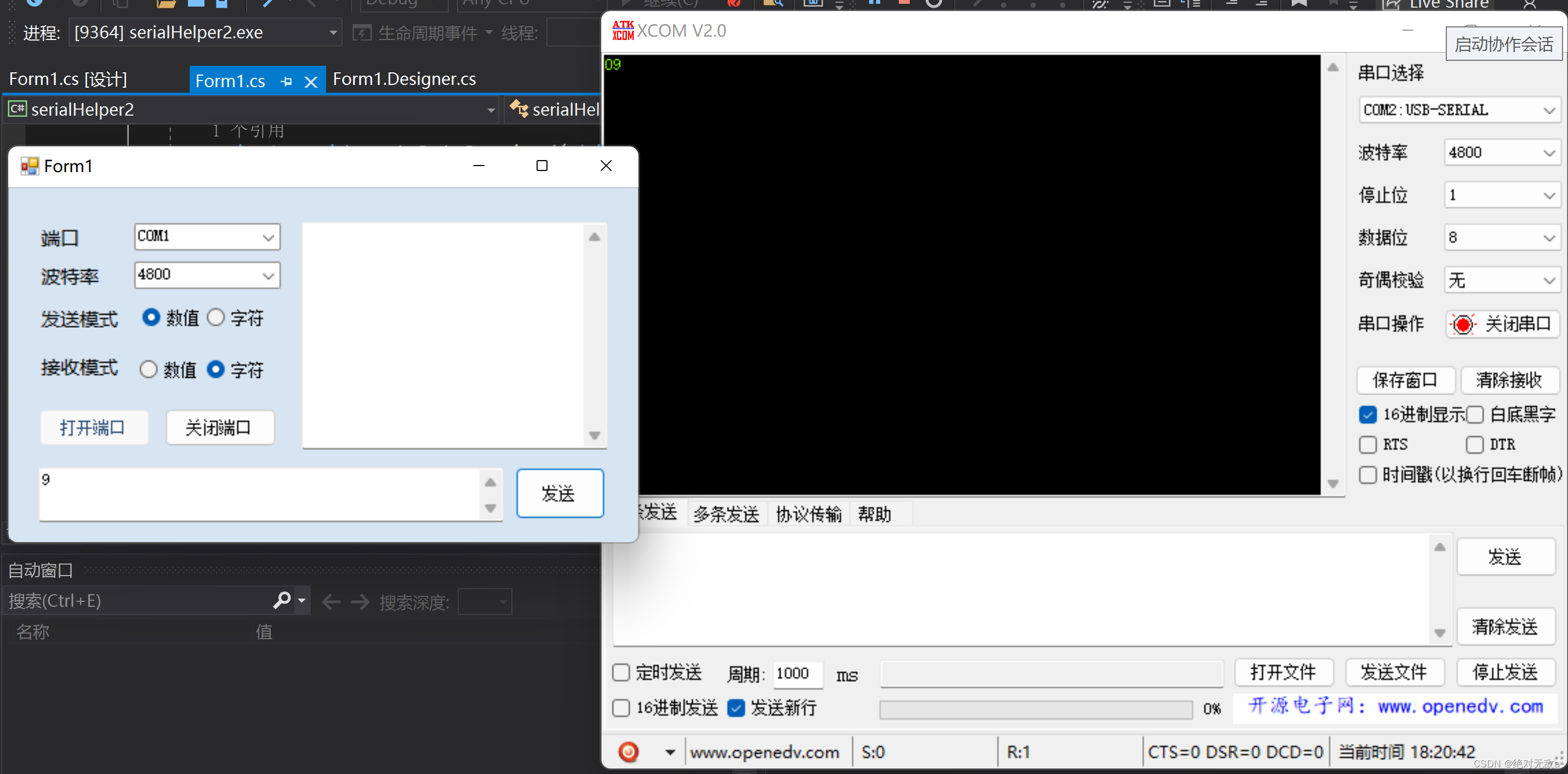
3.2.1 发送数据模式为数值模式
【注意】:因为发送的是数值(16进制的数据),故助手1要将右侧的16进制显示选中,才可以正确显示助手2所发送的内容。
如图所示:
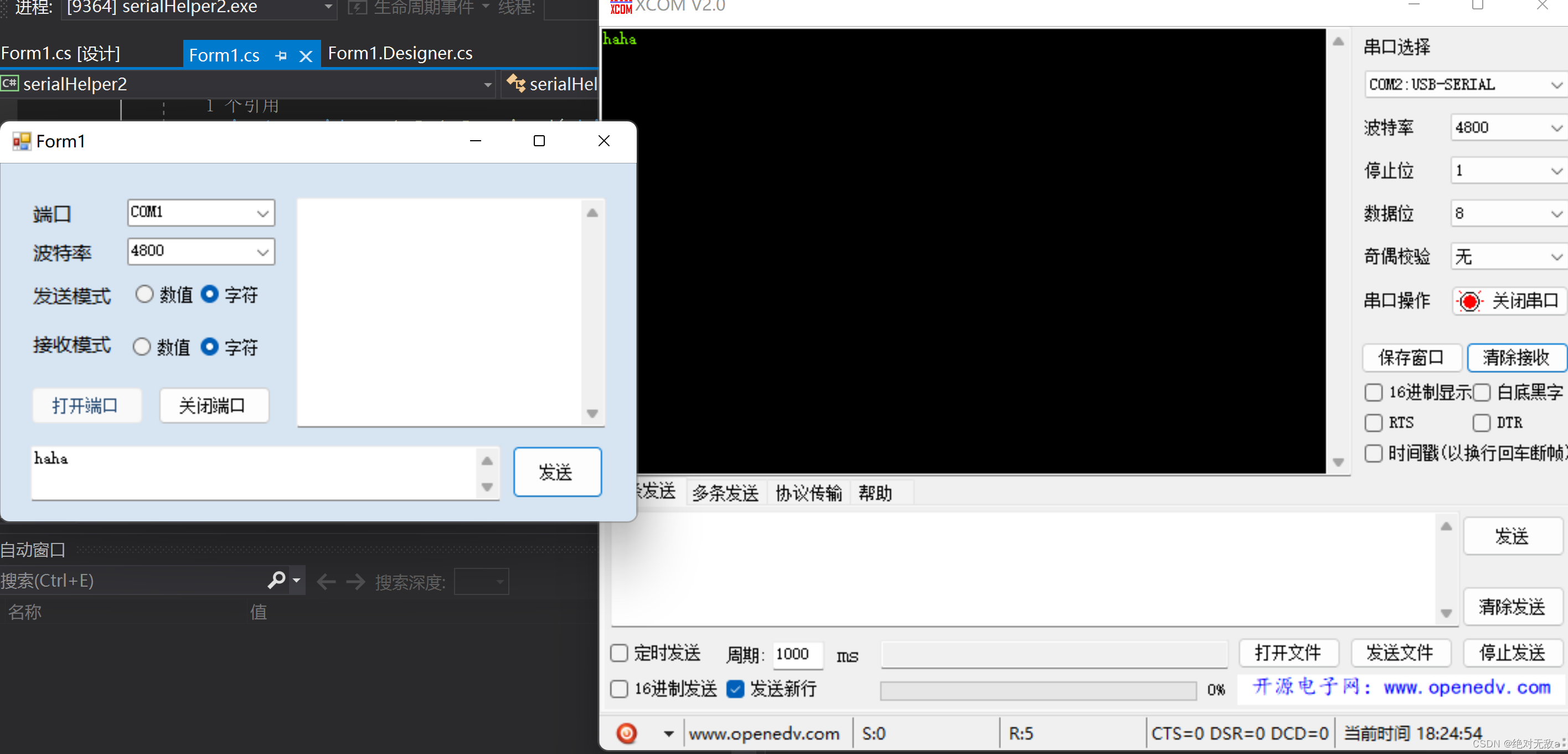
3.2.2 发送数据模式为字符串模式
助手1不需要选中“16进制显示”
如图:
3.3 助手2接收数据
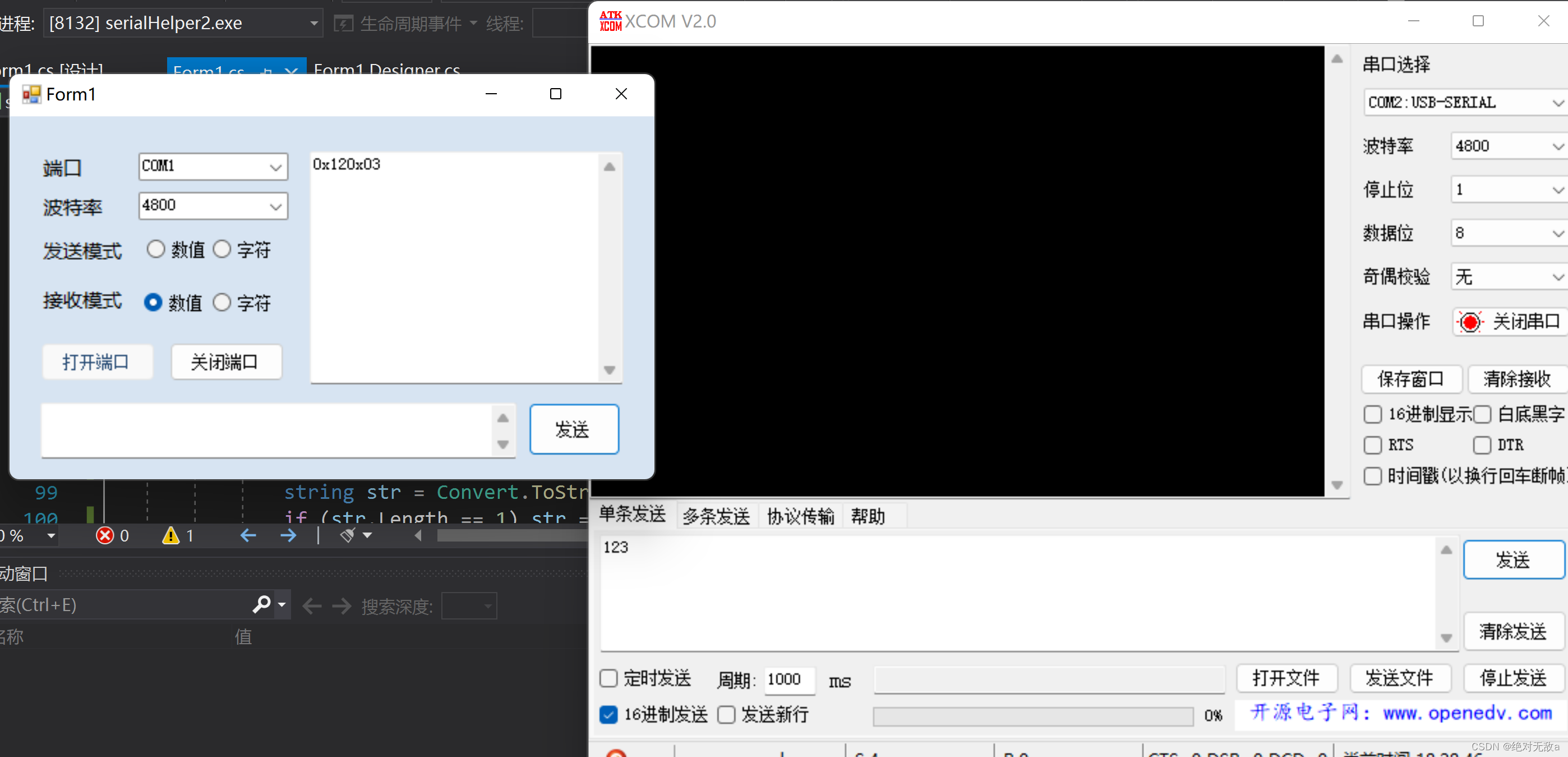
3.3.1 接收数据模式为数值模式
- 助手1要选中下方的16进制发送。
- 数值模式接收数据时,每次接收两位16进制数,比如接收的是123,则显示的格式为0x120x03,即12作为一个16进制数,3作为一个16进制数。
3.3.2 接收数据模式为字符串模式
助手1不需要选中下方的16进制发送
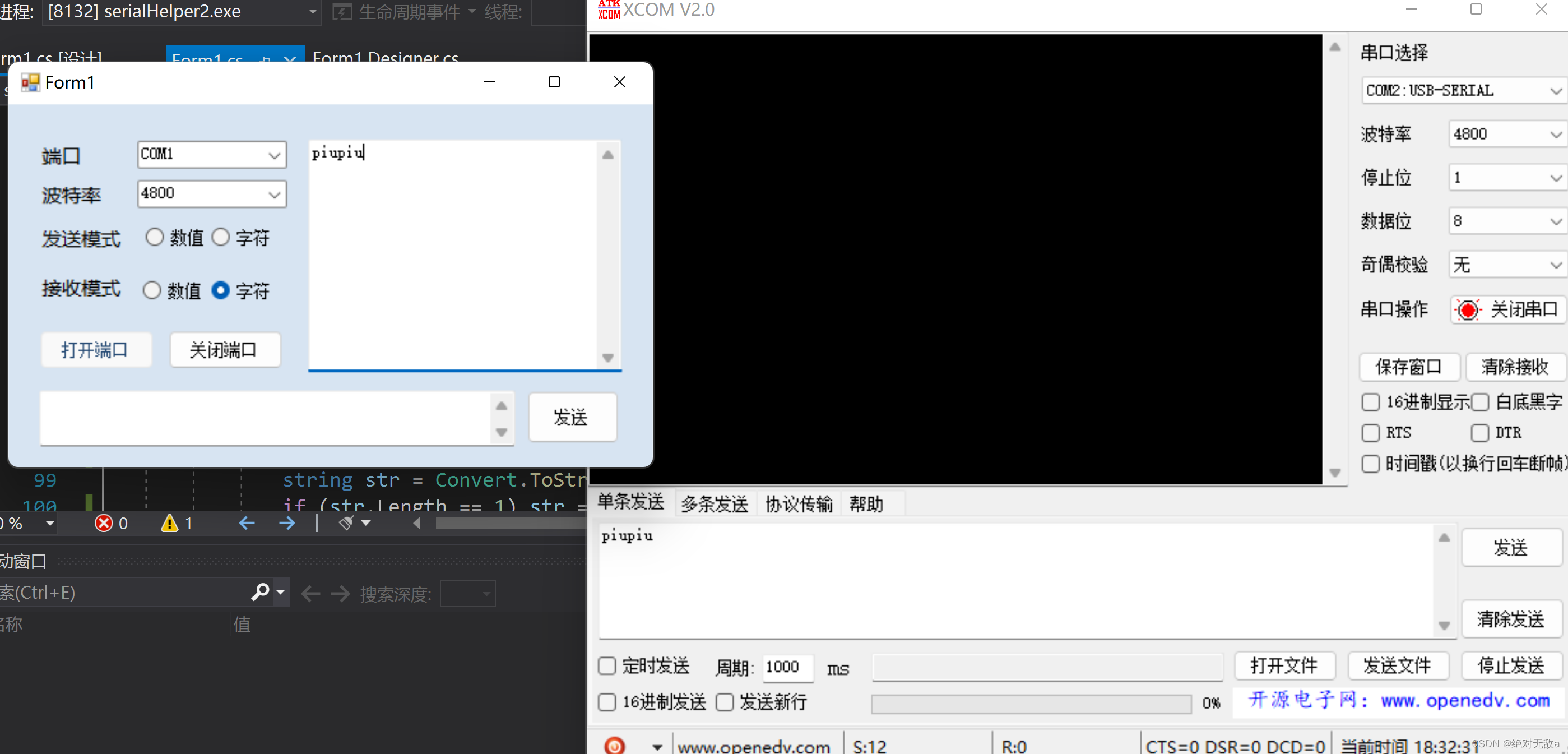
测试完毕,显示助手2可以正常发送数据接收数据~撒花★,°:.☆( ̄▽ ̄)/$:.°★ 。
【vspd和串口助手下载地址】
链接:https://pan.baidu.com/s/1WeWfbXKnEF6H3lEEPylAwQ
提取码:wggn
如果对您有用,点个赞再走吧~
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)