重装rqt工具
sudo apt-get install ros-melodic-rqt
sudo apt-get install ros-melodic-rqt-common-plugins
重装后尝试
rosrun rqt_image_view rqt_image_view
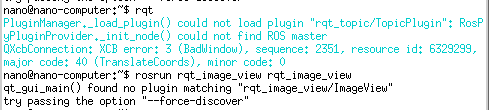
rqt_image_view已经安装完成,问题出在 qt 的缓存没有更新安装插件。
解决办法:
rm ~/.config/ros.org/rqt_gui.ini
rosrun rqt_image_view rqt_image_view
成功打开rqt_image_view

参考文章:
- bash: rqt: 未找到命令 rqt_image_view rqt_graph等等
- qt_gui_main() found no plugin matching ‘xxx’ 解决方法
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)