目录
一、在PX4平台中添加自己的应用程序
1.建立应用程序
Hello_can.c文件:
Kconfig文件:
CMakeLists.txt文件:
2.编译应用程序及固件
3.测试应用(硬件)
方法一:直接用命令脚本启动NUTTX系统
方法二:在QGC端连接PX4,打开MAVLLINK终端,即可实现。
二、CAN相关协议理解
三、PX4中CAN配置
一、在PX4平台中添加自己的应用程序
附上添加自定义程序的PX4官方教程!
1.建立应用程序
在PX4源码的 [src/module] 文件夹下建立自己的文件(添加的应用名称为hello_can),对应添加编译文件:(1)最重要的 .c编程文件,(2)CMakeList.txt文件,(3)Kconfig文件。注:在PX4 1.13.0版本固件中包含了一个模板文件放在[src/templates/module]下,可以利用该模板进行自定义应用的编程。
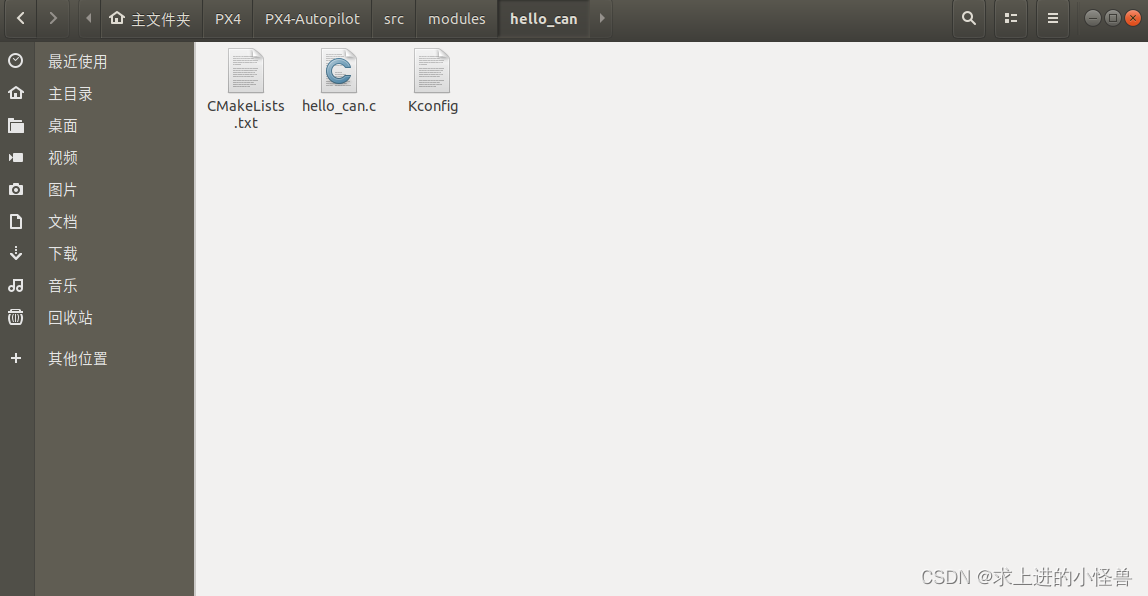
编译所需的三个文件
Hello_can.c文件:
#include <sys/types.h>
#include <sys/ioctl.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/posix.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <fcntl.h>
#include <errno.h>
#include <debug.h>
#include <nuttx/can/can.h>
#include <nuttx/config.h>
__EXPORT int hello_can_main(int argc, char *argv[]);
int hello_can_main(int argc, char *argv[])
{
PX4_INFO("Hello Can!");
PX4_INFO("exiting!\n");
return 0;
}
Kconfig文件:
menuconfig MODULES_HELLO_CAN
bool "hello_can"
default n
---help---
Enable support for hello_can
CMakeLists.txt文件:
px4_add_module(
MODULE modules__hello_can
MAIN hello_can
SRCS
hello_can.c
DEPENDS
)
注:确保三个文件中的程序名称对应无误。
2.编译应用程序及固件
为了保证程序的正常运行,需要确保自己添加的应用程序会在PX4固件中进行编译,应修改对应的PX4配置文件,此处我们修改的是boards/px4/fmu-v3/default.px4board,并在其末尾/对应模块后新加入一行:
CONFIG_MODULES_HELLO_CAN=y
其中,HELLO_CAN为自定义的文件名称,可以根据自己的文件自行修改。
3.测试应用(硬件)
执行编译指令,将程序烧录到飞控板,即可在QGC控制端进行测试:
make px4_fmu-v3_default
```
make px4_fmu-v3_default upload
编译成功之后,可以在命令端直接启动NUTTX系统的命令脚本,可以连接QGC地面控制端:
方法一:直接用命令脚本启动NUTTX系统
./Tools/mavlink_shell.py
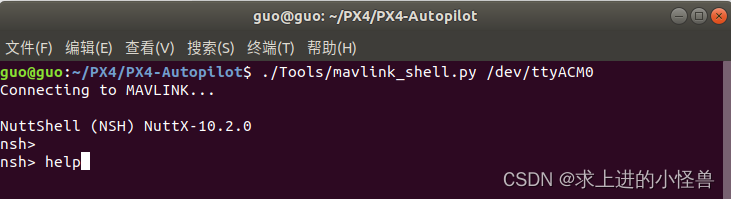
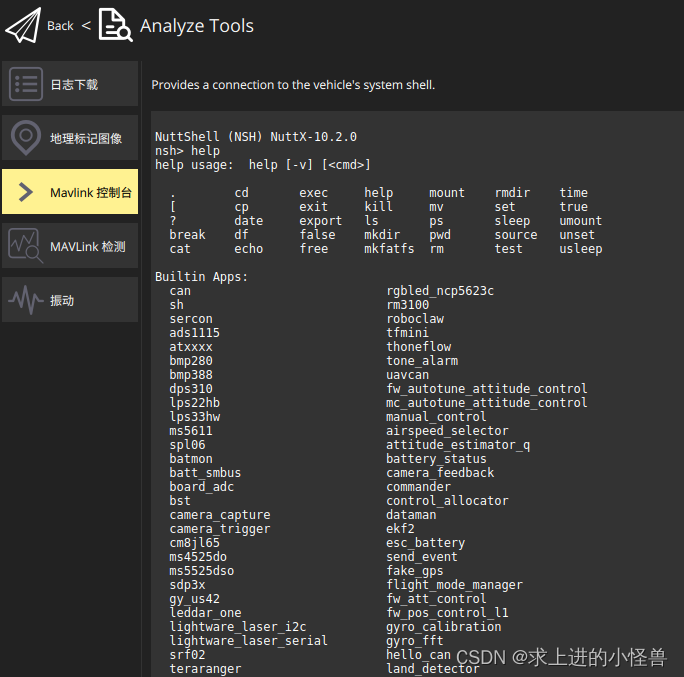
输入help,系统会给出当前可运行的应用程序,在列表中找到自己定义的应用名称(hello_can)
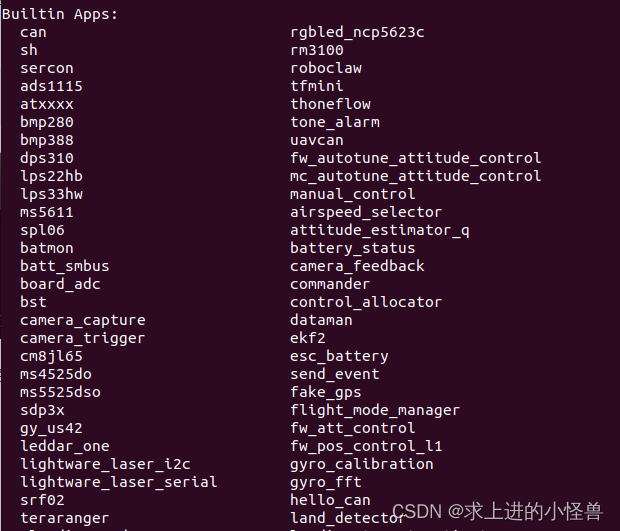
找到之后,输入名称运行即可实现自定义效果;
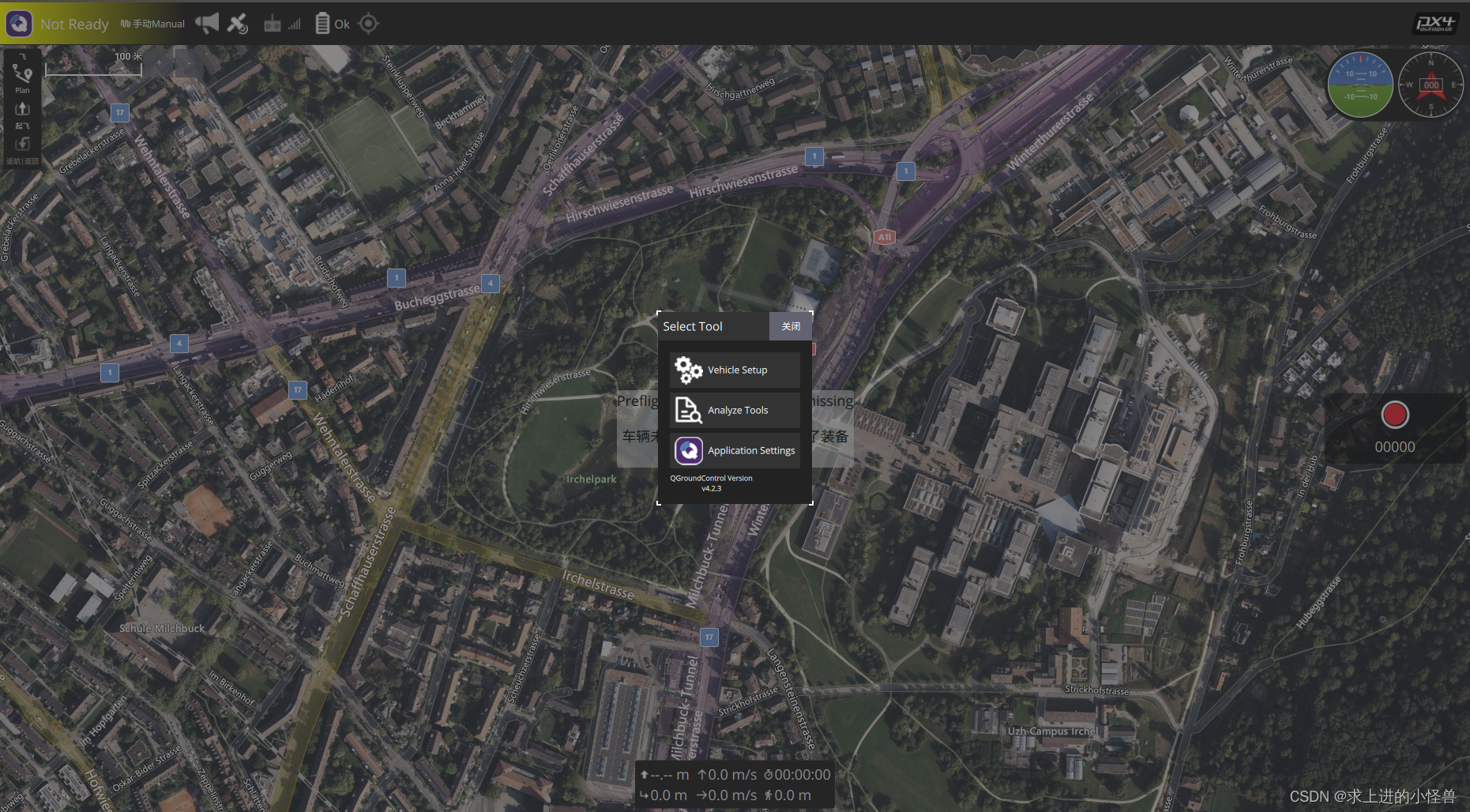
方法二:在QGC端连接PX4,打开MAVLLINK终端,即可实现。
点击Analyze Tools
二、CAN相关协议理解
原文链接->>
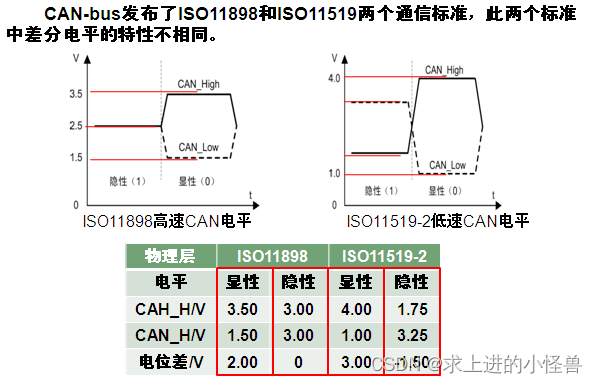
CAN 数据线为两根:CAN_High和CAN_Low,使用差分信号进行传输数据。
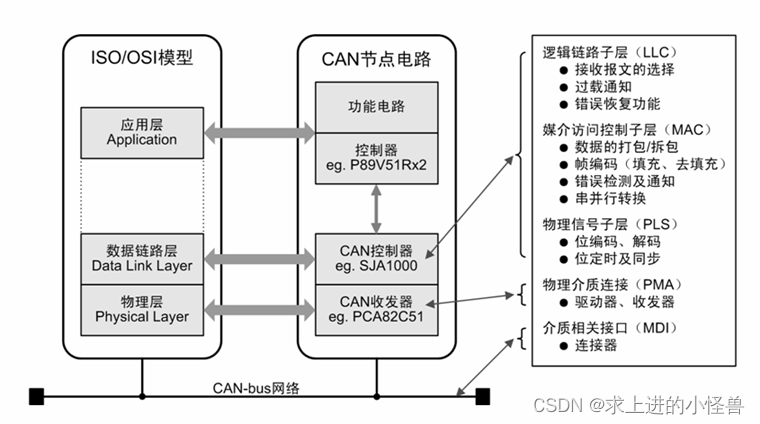
相关系统结构及链路模型
数据传输:
CAN总线节点上的节点发送数据是以报文的形式广播给网络中所有节点。收发器接收到数据就把数据传送给控制器,再由控制器检查判断是不是所需数据。不是则忽略。
- 网络上任何一个节点在任何时候都可以发送数据
- 多个节点发送数据,优先级低主动退出发送
- 短帧结构,每帧数据信息为0~8字节(具体用户定义),对数据编码而不是地址编码
- CAN每帧都有CRC校验和其他检验措施,严重错误的情况下具有自动关闭输出的功能
CAN总线数据分5种类型:数据帧、远程帧、错误帧、过载帧和帧间隔
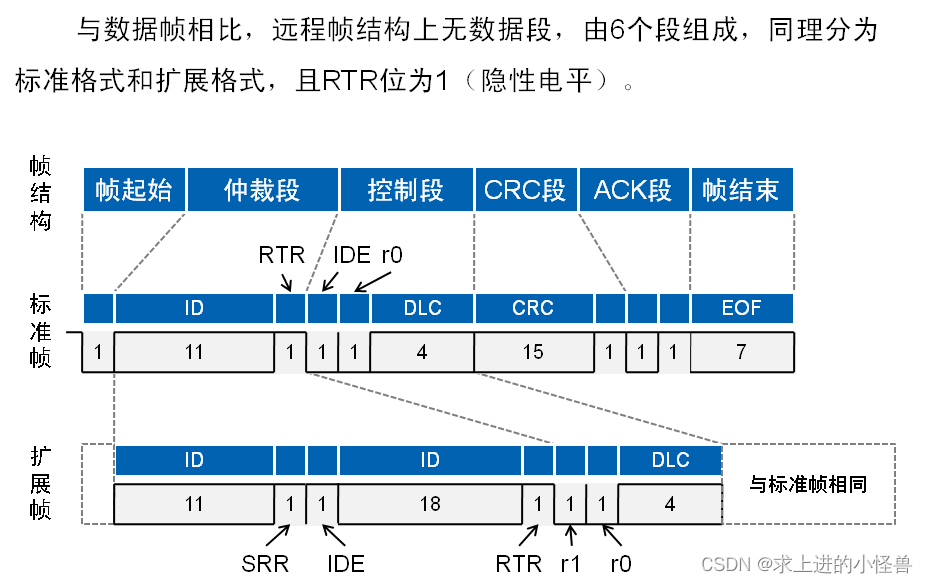
1. 数据帧:结构上由7个段组成,其中根据仲裁段ID码长度的不同,分为标准帧(CAN2.0A)和扩展帧(CAN2.0B)
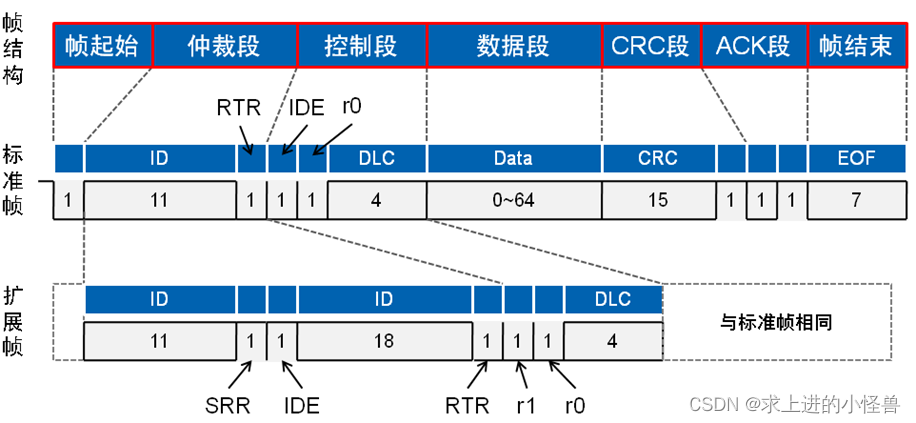
起始帧和结束帧用于界定一个数据帧;
起始帧由单个显性位组成;(总线空闲时,发送节点发送起始帧,其他节点开始同步接收)
结束帧由连续的7个隐性位组成;
仲裁段用于解决总线竞争问题(多个节点同时发送数据冲突)
显性、隐性 电平
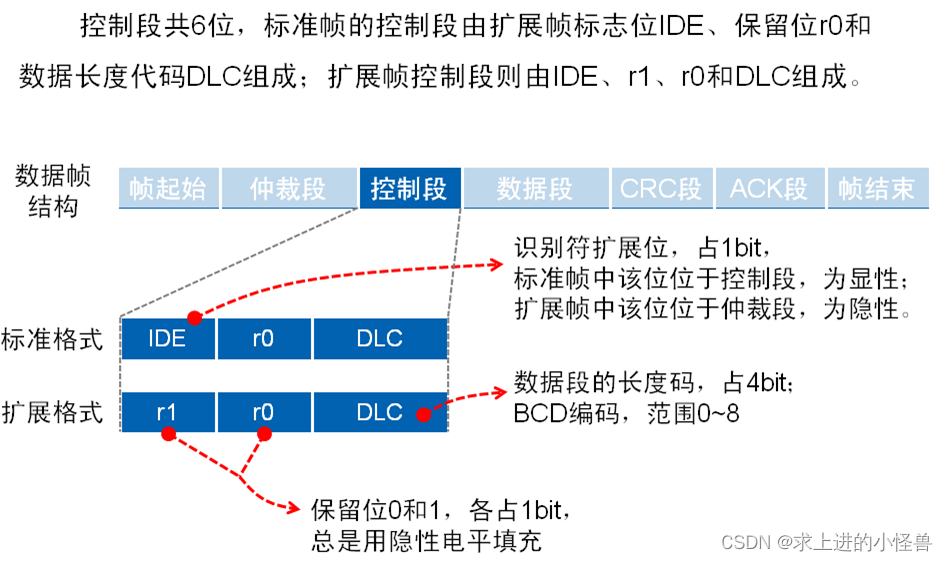
控制段
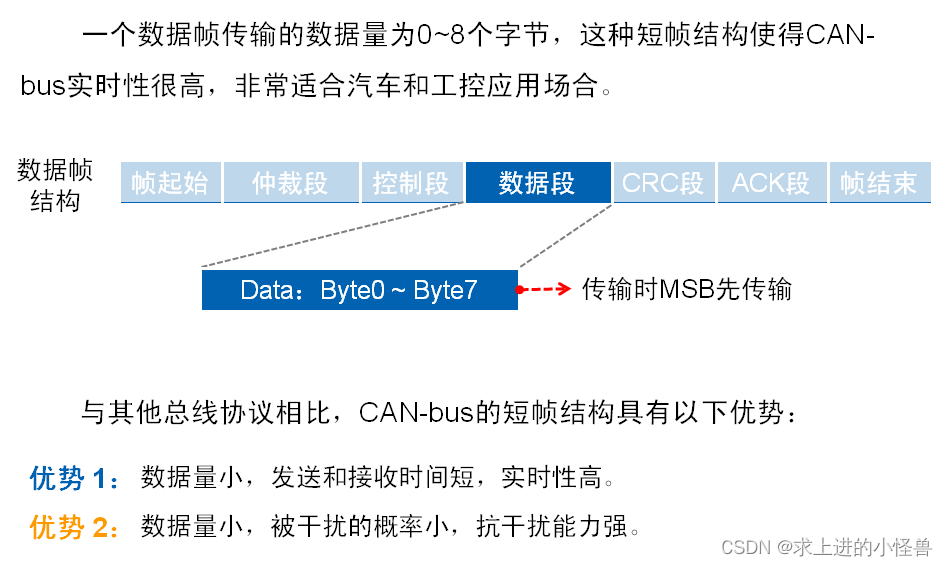
数据段:(实际的数据字节,保证了实时性)
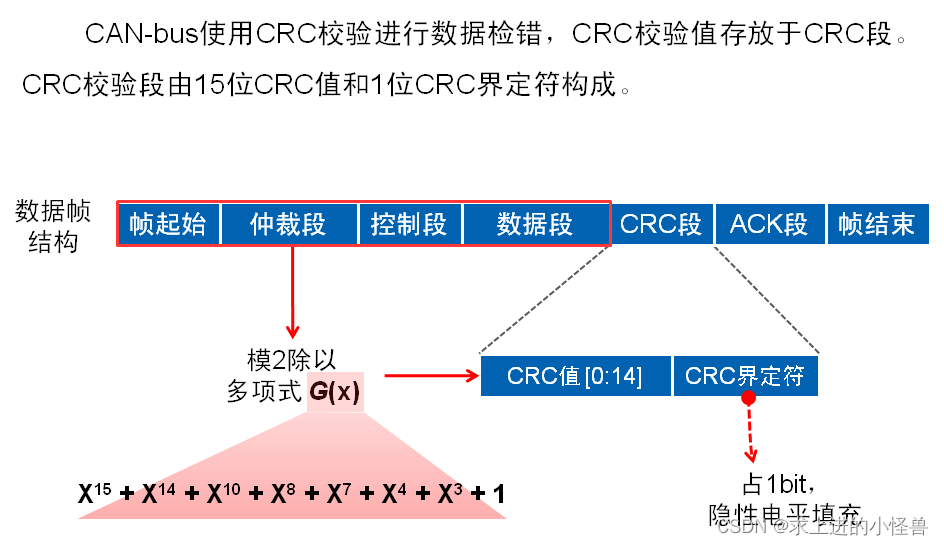
CRC段:(校验)
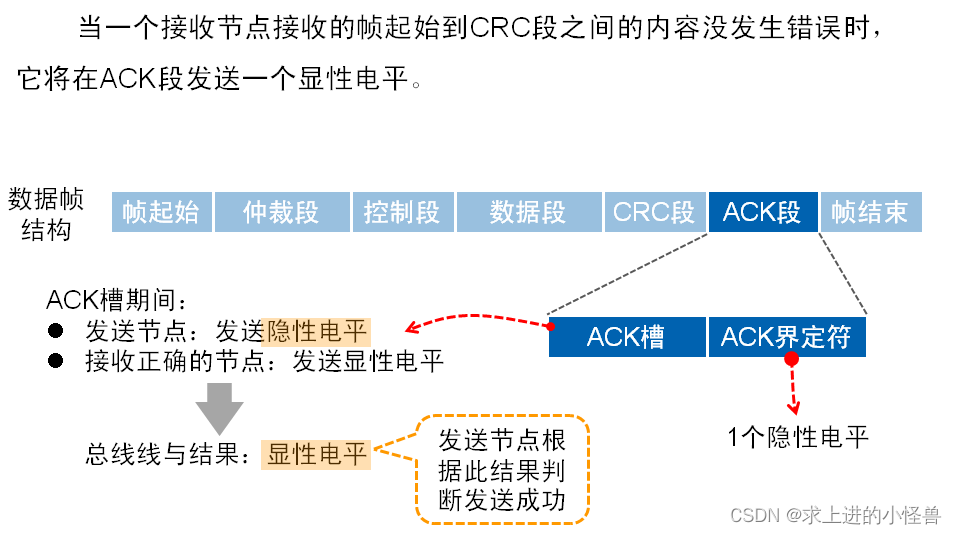
ACK段:(应答)
远程帧
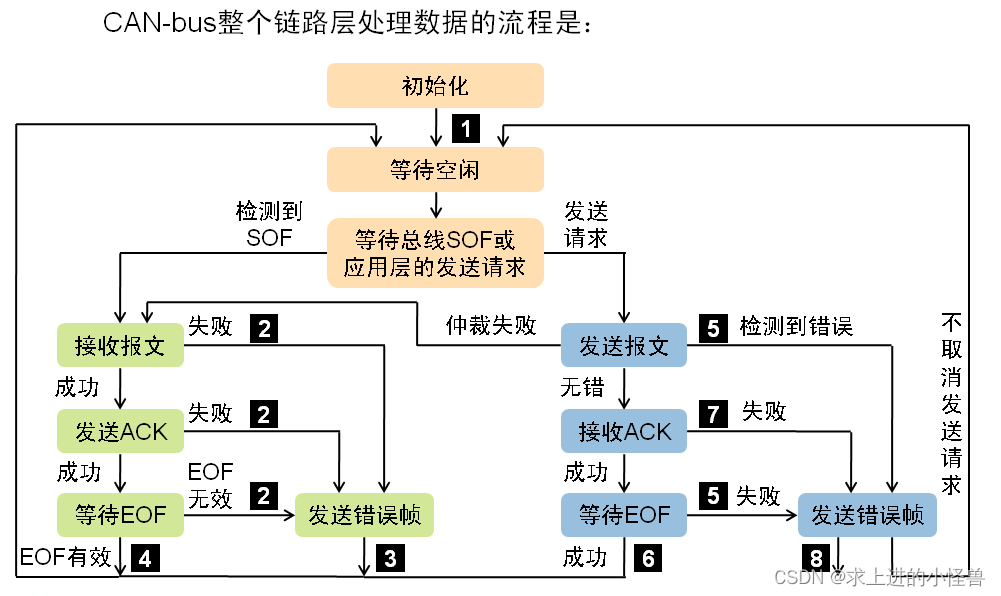
CAN整个链路层处理数据的顺序为:
根据CAN_main.c文件改写自己的CAN程序:
#include <sys/types.h>
#include <sys/ioctl.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/posix.h>
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <string.h>
#include <fcntl.h>
#include <errno.h>
#include <debug.h>
#include <nuttx/can/can.h>
#include <nuttx/config.h>
# define MAX_ID CAN_MAX_STDMSGID
# define CAN_OFLAGS O_RDWR
//从源文件中找到can的初始化函数
int can_devinit(void)
{
static bool initialized = false;
struct can_dev_s *can;
int ret;
/* Check if we have already initialized */
if (!initialized) {
/* Call stm32_caninitialize() to get an instance of the CAN interface */
can = stm32_caninitialize(1);//'CAN_PORT
if (can == NULL) {
canerr("ERROR: Failed to get CAN interface\n");
return -ENODEV;
}
/* Register the CAN driver at "/dev/can0" */
ret = can_register("/dev/can0", can);
if (ret < 0) {
canerr("ERROR: can_register failed: %d\n", ret);
return ret;
}
/* Now we are initialized */
initialized = true;
}
return 0;
}
__EXPORT int hello_can_main(int argc, char *argv[]);
int hello_can_main(int argc, char *argv[])
{
struct can_msg_s txmsg; //CAN结构体定义
int i;
int fd;
int msgdlc;
size_t msgsize;
uint16_t msgid;
PX4_INFO("Hello Can!");
can_devinit();
fd = open(CONFIG_EXAMPLES_CAN_DEVPATH, CAN_OFLAGS);
msgdlc =4;
msgid = 1;
txmsg.cm_hdr.ch_id = msgid;
txmsg.cm_hdr.ch_rtr = false;
txmsg.cm_hdr.ch_dlc = msgdlc;
txmsg.cm_hdr.ch_unused = 0;
for (i = 0; i < msgdlc; i++) {
txmsg.cm_data[i] = (i+1);
}
for(int cnt=0; cnt<40; cnt++){
/* Send the TX message */
msgsize = CAN_MSGLEN(msgdlc);
write(fd, &txmsg, msgsize);//nbytes CAN 数据发送
}
printf(" ID: %4" PRIu16 " DLC: %d\n", msgid, msgdlc);
PX4_INFO("exiting!\n");
close(fd); //关闭接口设备
fflush(stdout);//清空输出缓存区
return 0;
}
三、PX4中CAN配置
使用PX4固件中的配置框架进行CAN的相关设置
make px4_fmu-v3_default menuconfig
config命令错误的相关链接——>menuconfig错误处理
配置界面如下:(配置视频)
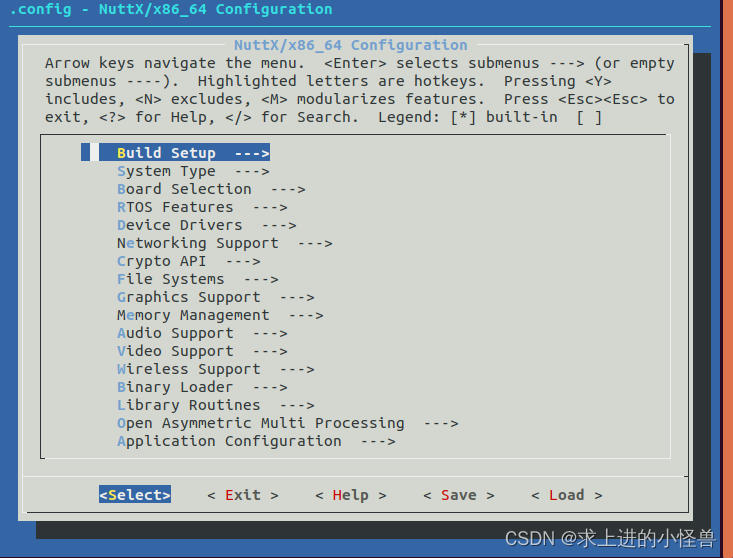
分别选择打开以下几项配置选项->原文链接
- Device Drivers ---> CAN Driver Support
- Application Configuration ---> CAN Utilities ---> CAN utility library #
- optional
- Application Configuration ---> Examples ---> CAN example
- System Type ---> STM32 Peripheral Support ---> CAN1
- 保存退出
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)