前言:
机器人本体和机器人的工作环境中往往存在大量的组件元素,在机器人设计和应用中会涉及不同组件的位置和姿态,这就需要引入坐标系和坐标变换的概念。
一、机器人中空间描述和变换:
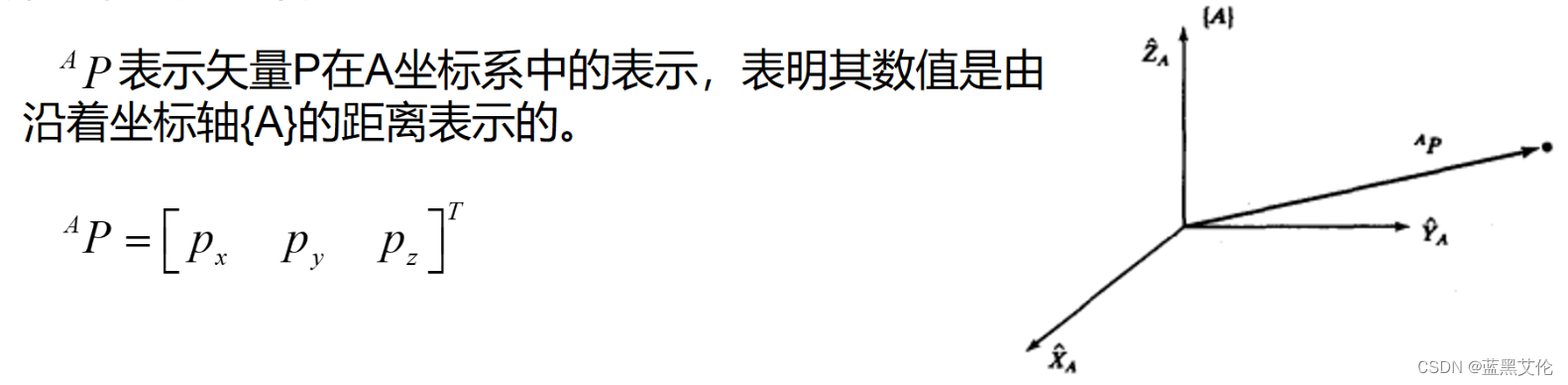
1.位置描述:
一旦建立了坐标系,就可以用一个3*1的位置矢量对世界坐标系中的任何点进行定位。由于世界坐标系中通常还要定义许多坐标系,需在位置矢量上附加说明是在哪一个坐标系中定义的。
2.姿态描述:
位置描述只能表示空间的点,但对于末端执行器还需要描述其空间的姿态。

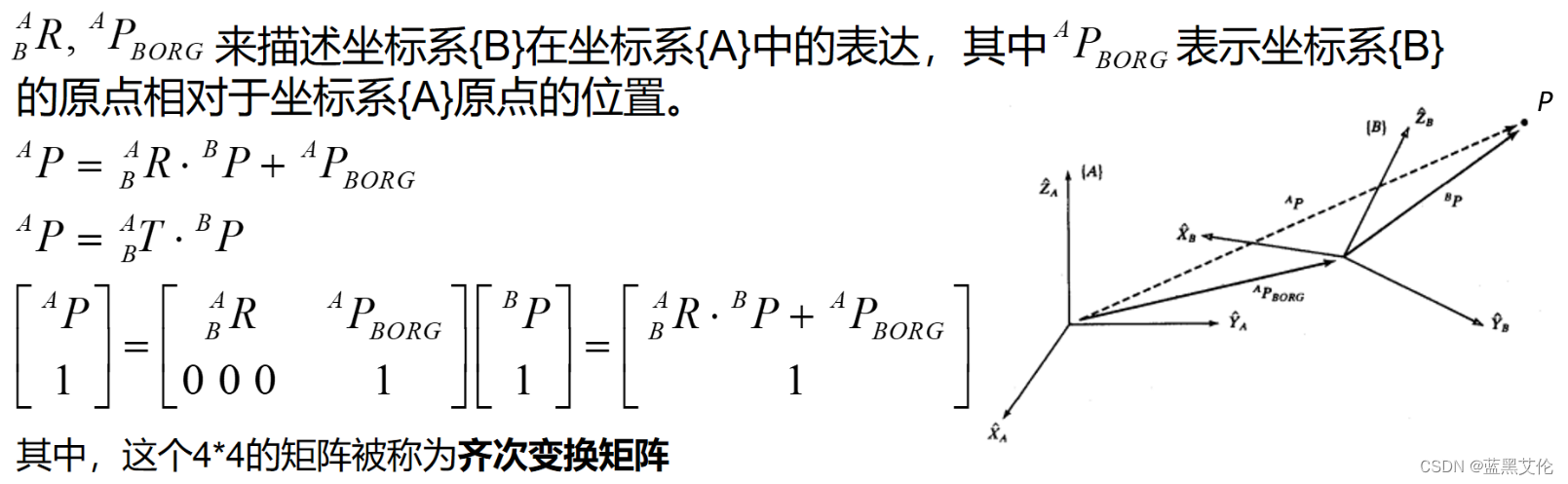
3.坐标系的变换:
二、TF功能包:
1.TF功能包的功能:
TF是一个能让用户随时间跟踪多个坐标系的功能包。它使用树形数据结构,根据时间缓冲并维护多个坐标系之间的坐标变换关系,可以帮助开发者在任意时间、坐标系间完成点、向量等坐标的变换。
TF可以请求如下类型的数据:
(1)5秒之前机器人头部坐标系相对于全局坐标系的关系;
(2)机器人夹取的物体相对于机器人中心坐标系的位置;
(3)机器人中心坐标系相对于全局坐标系的位置。
使用TF功能包需要以下两个步骤:
(1)监听TF变换:
接收并缓存系统中发布的所有坐标变换数据,并从中查询作需要的坐标变换关系。
(2)广播TF变换:
向系统中广播坐标系之间的坐标变换关系。
2.TF功能包安装:
sudo apt-get install ros-noetic-turtle-tf
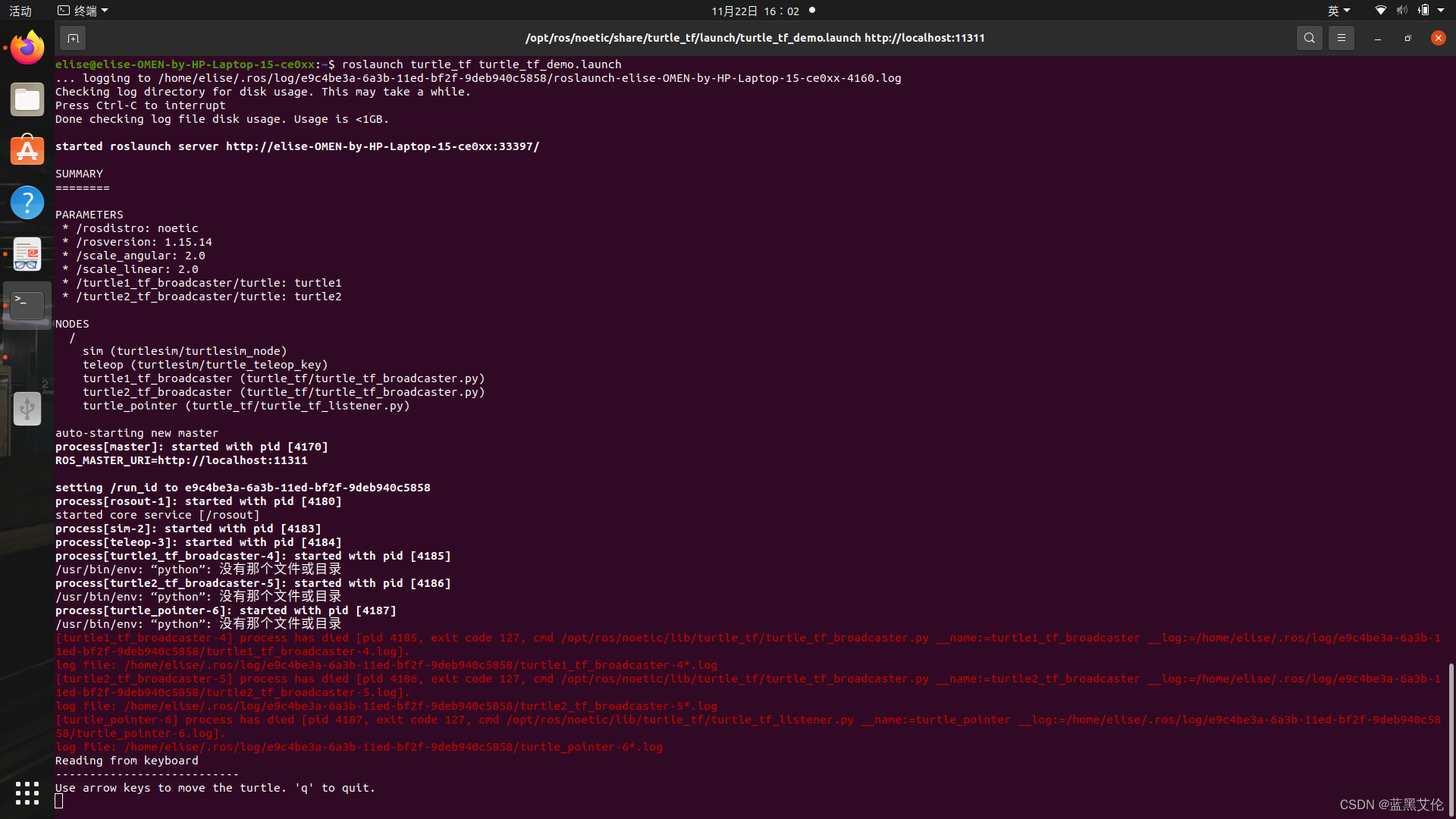
roslaunch turtle_tf turtle_tf_demo.launch
rosrun turtlesim turtle_teleop_key
PS:如果roslaunch turtle_tf turtle_tf_demo.launch报错,运行以下命令:
sudo apt install python-is-python3
3.乌龟例程中的TF:
(1)功能:
键盘控制乌龟1的运动,同时乌龟2会规划最短路径跟随乌龟1。该程序用于检验TF安装是否成功,同时是后续学习TF的广播和监听功能的载体。
(2)TF功能包安装和排错过程:


(3)运行程序:


4.TF工具:
(1)view_frames工具:
可视化系统当中的所有tf的关系,监听5s,把5s之内所有坐标系之间的关系保存下来,并生成一个pdf。
rosrun tf view_frames
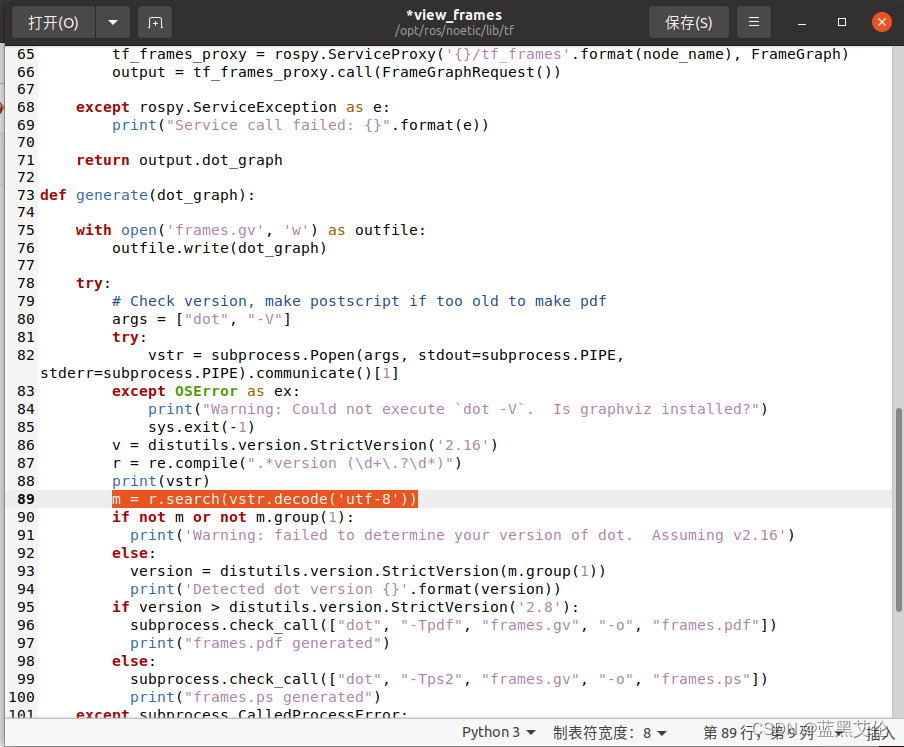
PS:如果出现以下报错,修改view_frames文件第89行,由于该文件为只读文件,需获取权限后打开。


将第89行的m = r.search(vstr)修改为m = r.search(vstr.decode('utf-8'))
再次运行:

生成的pdf文件位于主目录下:


(2)tf_echo 工具:
查看指定坐标系之间的变换命令。以下代码查询turtle1和turtle2之间的位置关系。
rosrun tf tf_echo turtle1 turtle2

(3)可视化工具 rviz:
1)安装rviz:
sudo apt-get install ros-noetic-rviz

2)使用rviz观察上述乌龟例程:
rosrun rviz rviz -d `rospack find turtle_tf`/rviz/turtle_rviz.rviz


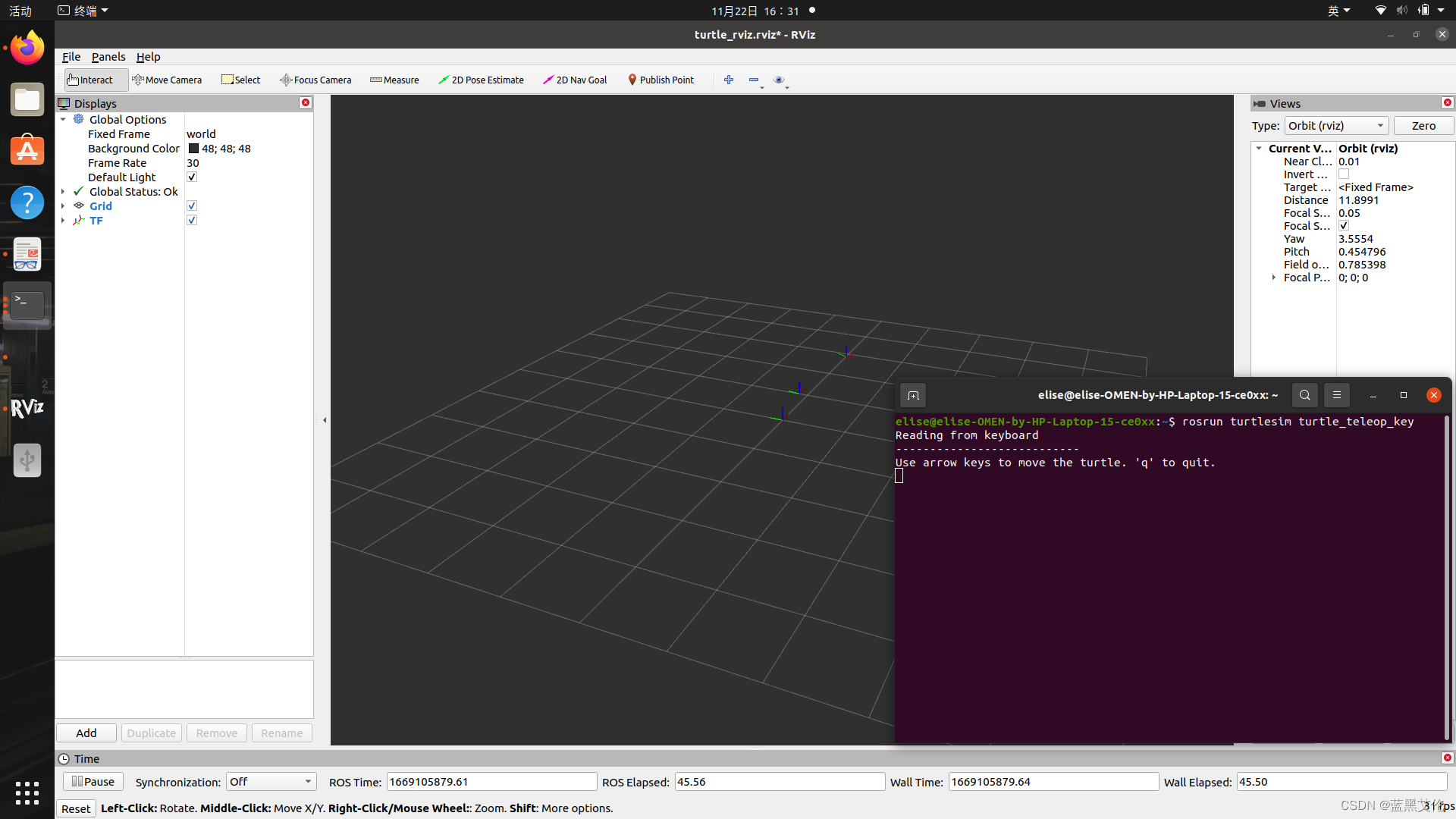
3)添加一个TF坐标:

(4)tf_monitor 工具:
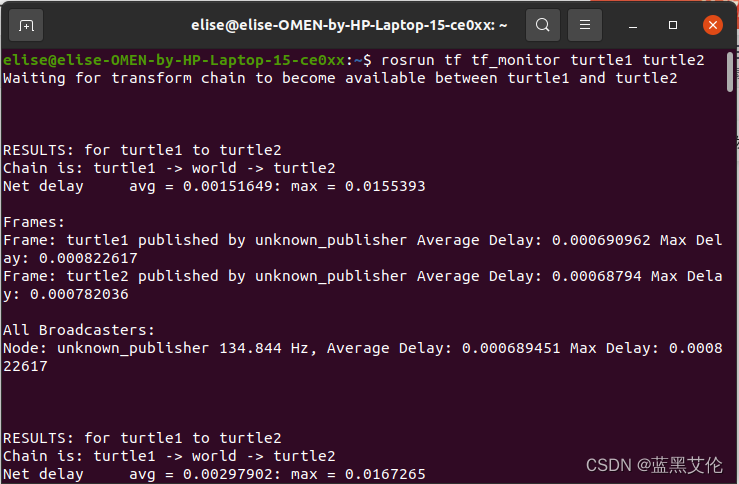
打印TF树中所有坐标系的发布状态,可查询指定坐标系之间的发布状态。
rosrun tf tf_monitor

rosrun tf tf_monitor turtle1 turtle2
(5)static_transform_publisher 工具:
静态发布一个从父坐标系到子坐标系的一个坐标变换。(这个用的非常频繁!)
rosrun tf static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
rosrun tf static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms
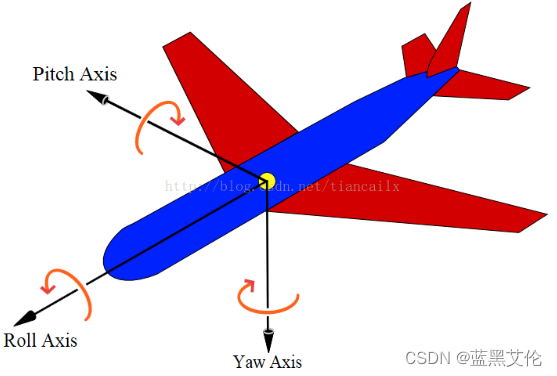
以上两种命令格式需要设置坐标的偏移参数和旋转参数:偏移参数使用相对于x、y、z三轴的坐标位移;旋转参数的第一种命令格式使用以弧度为单位的yaw、pitch、roll角度(yaw是围绕z轴旋转的偏航角,pitch是围绕y轴旋转的俯仰角,roll是围绕x轴旋转的翻滚角),第二种命令格式使用四元数表达旋转角度。发布频率以ms为单位。
该命令不仅可以在终端使用,还可以在launch文件中使用:
1)在launch文件中添加如下片段
<launch>
<node pkg="tf"
type="static_transform_publishe
r" name="Juedui_Link"
args="2 3 0 0 0 0 world
Juedui_Link 100" />
</launch>
2)启动launch文件:
roslaunch turtle_tf turtle_tf_demo.launch
三、TF坐标系广播与监听的编程实现:
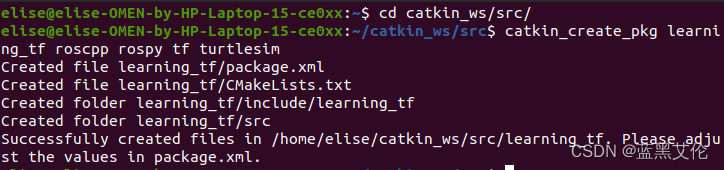
1.创建功能包:

2.如何实现一个TF广播器:
(1)定义TF广播器
(2)创建坐标变换值
(3)发布坐标变换
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程产生tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>
std::string turtle_name;
void poseCallback(const turtlesim::PoseConstPtr& msg)
{
// 创建tf的广播器
static tf::TransformBroadcaster br;
// 初始化tf数据
tf::Transform transform;
transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );
tf::Quaternion q;
q.setRPY(0, 0, msg->theta);
transform.setRotation(q);
// 广播world与海龟坐标系之间的tf数据
br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_broadcaster");
// 输入参数作为海龟的名字
if (argc != 2)
{
ROS_ERROR("need turtle name as argument");
return -1;
}
turtle_name = argv[1];
// 订阅海龟的位姿话题
ros::NodeHandle node;
ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
};
3.如何实现一个TF监听器:
(1)定义TF监听器
(2)查找坐标变换
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程监听tf数据,并计算、发布turtle2的速度指令
*/
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "my_tf_listener");
// 创建节点句柄
ros::NodeHandle node;
// 请求产生turtle2
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
// 创建发布turtle2速度控制指令的发布者
ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);
// 创建tf的监听器
tf::TransformListener listener;
ros::Rate rate(10.0);
while (node.ok())
{
// 获取turtle1与turtle2坐标系之间的tf数据
tf::StampedTransform transform;
try
{
listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);
}
catch (tf::TransformException &ex)
{
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +
pow(transform.getOrigin().y(), 2));
turtle_vel.publish(vel_msg);
rate.sleep();
}
return 0;
};
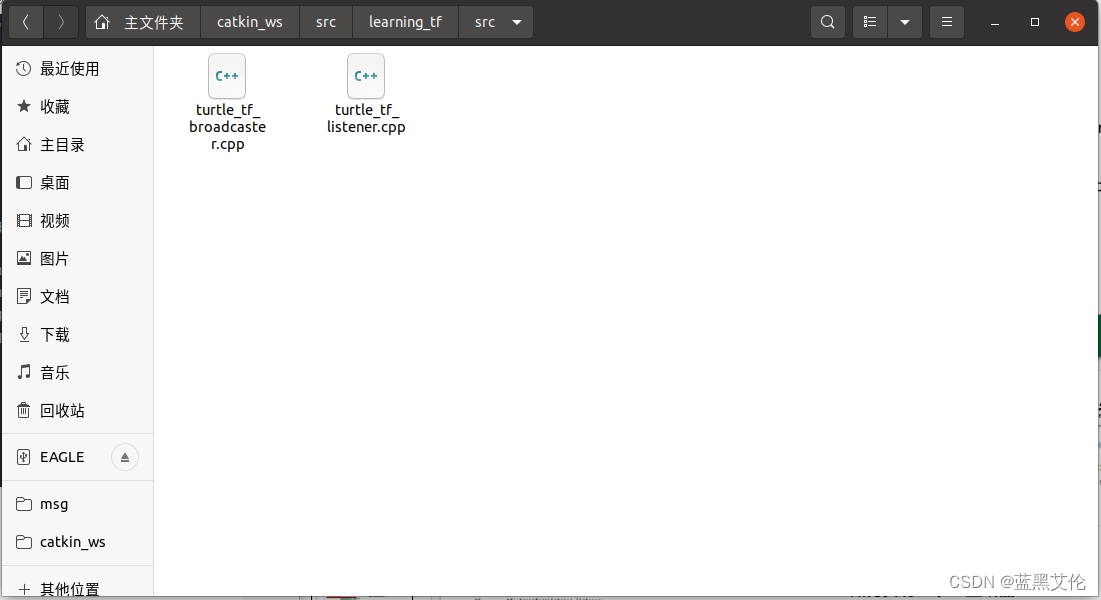
4.将广播器和监听器文件放在catkin_ws/src/learning_tf/src目录下:
5.配置CMakeLists中的编译规则:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})

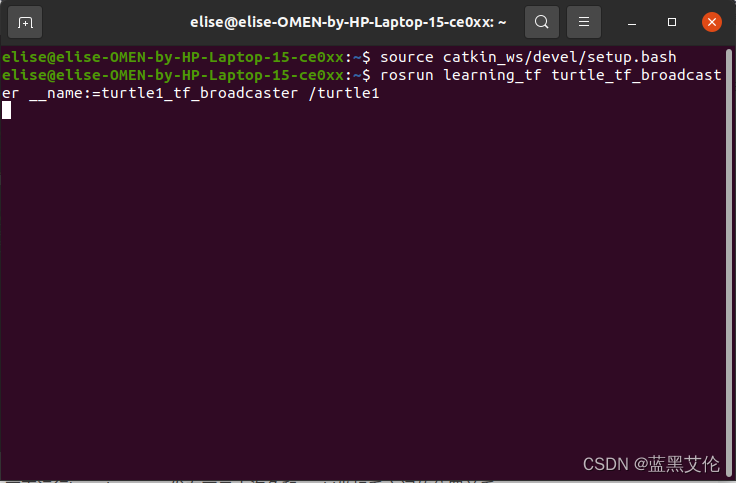
6.编译并运行:



下面运行broadcaster,发布两只小海龟和world坐标系之间的位置关系:



本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)