TX2配置RealSense D455相机SDK和ros驱动
- 1 SDK安装
- 2 RealSense-ros安装
- 3 bug及解决
- 3.1 realsense-viewer显示usb2.1
- 3.2 Could not found ddynamic_reconfigure
折腾了两天终于把realsense的驱动装好了,尝试了命令安装,源码安装,前前后后搞了三遍,结果相机死活连不上,最后发现直接安装最新版SDK,相机居然连上了…神奇
最后发现原来是我的设备不能用cuda,如果编译命令用了cuda,就会有各种问题
设备:
- 妙算2G(L4T 28.2.1 / ubuntu16.04 / cmake3.9.2 / cuda9.0)
- RealSense D455
参考:
https://blog.csdn.net/nannan7777/article/details/103128397
1 SDK安装
git clone https://github.com/IntelRealSense/librealsense.git
cd librealsense
sudo apt-get install git libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev -y
mkdir build
cd build
cmake ../
sudo make uninstall && make clean && make && sudo make install
然后在终端打开realsense-viewer就能查看相机效果啦

2 RealSense-ros安装
下载源码,catkin_make编译
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
launch文件启动相机
source devel/setup.bash
roslaunch realsense2_camera rs_camera.launch
用rviz查看rgb和深度图效果,右边是发布的topic:

3 bug及解决
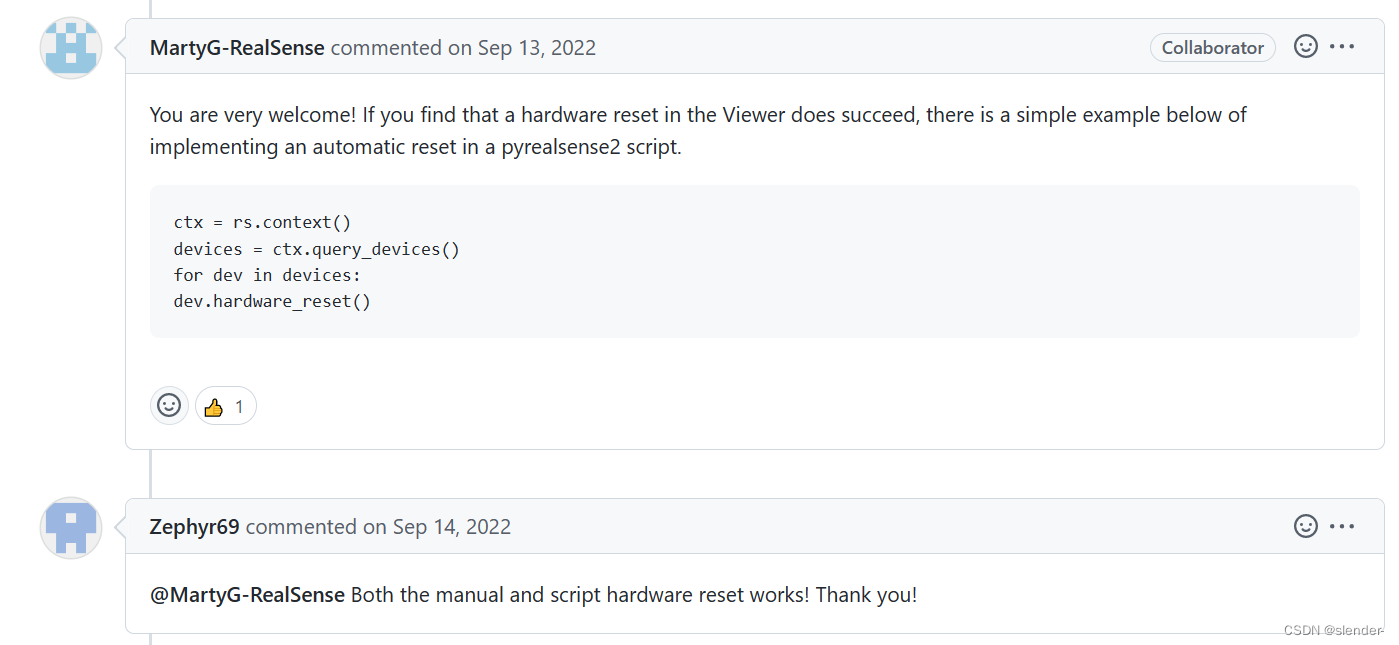
3.1 realsense-viewer显示usb2.1
这个问题很神奇,我第一次打开显示usb2.1,第二次打开显示usb3.2
在github上发现有人问这个问题 https://github.com/IntelRealSense/librealsense/issues/9681
手动使用hardware_reset,或在脚本中更改都可以解决

3.2 Could not found ddynamic_reconfigure
参考:https://blog.csdn.net/weixin_44401286/article/details/102943016
在https://github.com/pal-robotics/ddynamic_reconfigure找到kinetic-devel分支,解压到catkin_ws/src空间,再使用catkin_make安装,这样在编译realsense时就可以找到
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)