如何关闭docker容器里的进程
1、使用docker exec 容器名 ps -ef命令查看进程信息
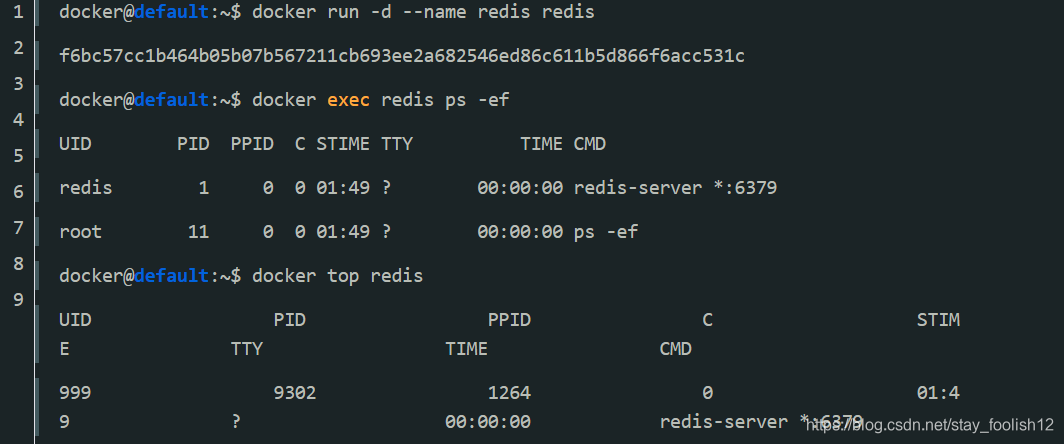
示例:
创建名为"redis"的容器,并在容器内部和宿主机中查看容器中的进程信息:
2、然后进入该容器中,执行如下命令即可停掉进程:

另一种方案:
是直接stop 容器ID,然后rm 容器ID,容器里面部署的进程也关掉了(postman断掉了)。

docker ps -a|grep 容器名,检查容器是否真的关掉,若关掉,出现下图

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)