Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
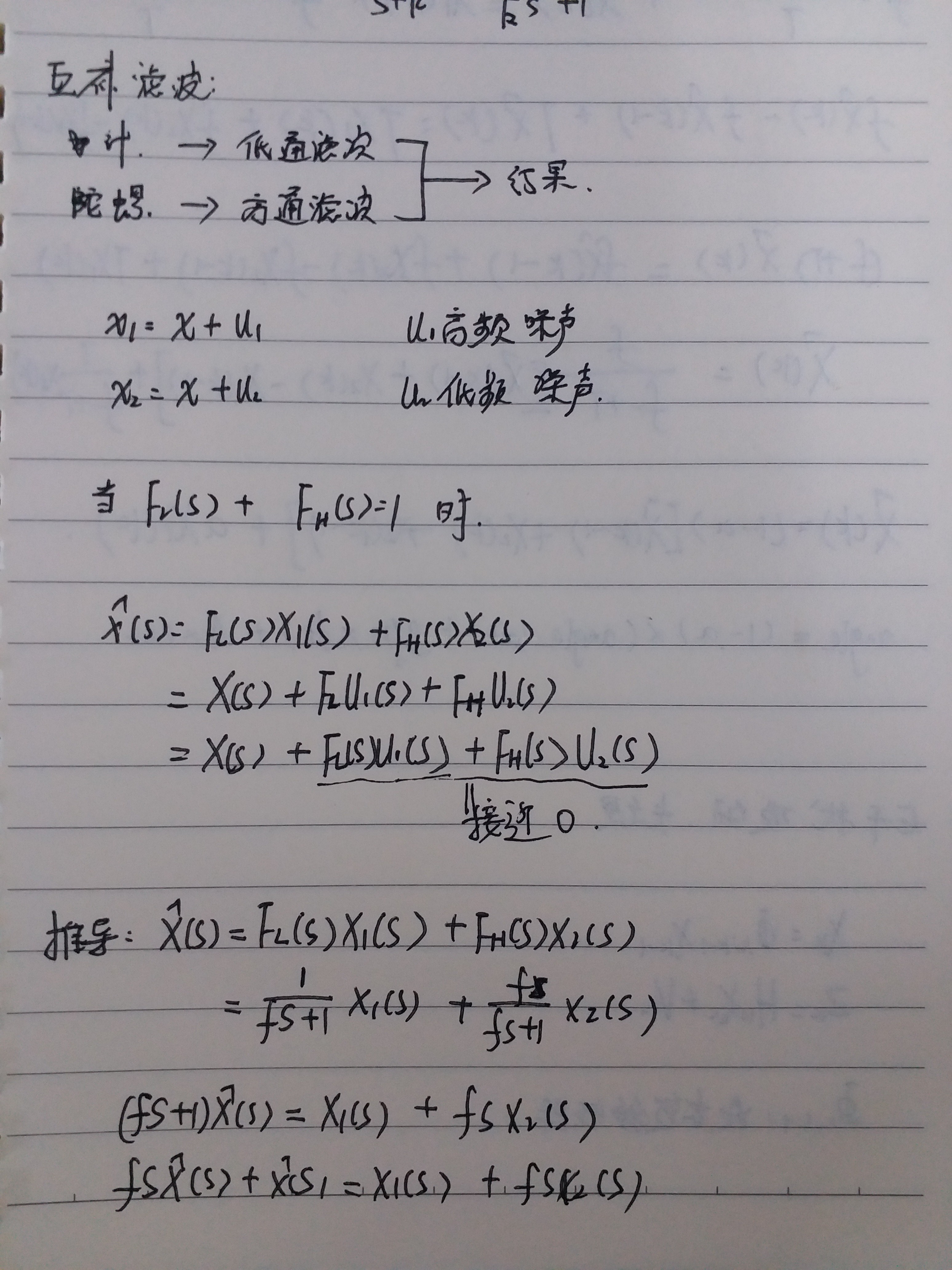
mpu6000、mpu6050陀螺仪加速度计互补滤波数据融合算法原理推导
2023-05-16
时间比较紧,就只传照片了。。。。。。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
MPU6000
MPU6050
陀螺仪加速度计互补滤波数据融合算法原理推导
mpu6000、mpu6050陀螺仪加速度计互补滤波数据融合算法原理推导 的相关文章
ROS-kinetic下使用MPU6050串口模块发布imu主题
转载自 xff1a https www jianshu com p 0c9ac4180dfd ROS kinetic下使用MPU6050串口模块发布imu主题 斜月映三星 2018 12 10 16 50 36字数 125阅读 1 450
MPU6050温度的计算公式
在惯导融合的代码中常见计算MPU6050温度的公式 xff0c 如 xff1a temperature 61 36 53f 43 double GetData TEMP OUT H 340 0f 或者 Temp 61 36 53 43 Te
STM32F4无人机6轴运动处理组件MPU6050
目的 学习MPU6050的原理 MPU6050初始化方法 原理 MPU6050是9轴运动处理传感器 它集成了3轴MEMS陀螺仪 xff0c 3轴MEMS加速度计 xff0c 以及一个可扩展的数字运动处理器DMP xff08 Digital
MPU6050介绍及姿态解算
1 介绍 xff1a MPU6050 是 InvenSense 公司推出的全球首款整合性 6 轴运动处理组件 xff0c 相较于多组件方案 xff0c 免除了组合陀螺仪与加速器时之轴间差的问题 xff0c 减少了安装空间 xff08 1 x
DSP28系列—MPU6050漂移补偿方案的探索
说在前面的话 xff1a 大家都知道 xff0c 陀螺仪是一种能测量角速度的器件 xff0c 是姿态解算 角度测量等任务中无法缺少的工具 单轴的陀螺仪配合单轴的加速度计 xff0c 就能结算出一个姿态角 在平衡车的应用中 xff0c 一维的
STM32读取MPU6050陀螺仪
目录 一 硬件设计 1 模块说明 2 电气原理图 二 程序设计 1 工程创建 2 程序设计 xff08 1 xff09 main程序 xff08 2 xff09 IIC初始化 xff08 3 xff09 串口1配置 xff08 4 xff0
自平衡小车控制(stc12+mpu6050程序)
自平衡小车控制 xff08 stc12 43 mpu6050程序 xff09 两轮自平衡车最终版控制程序 xff08 6轴MPU6050 43 互补滤波 43 PWM电机 xff09 单片机STC12C5A60S2 晶振 xff1a 20M
arduino 自平衡小车3\对mpu6050获得的X轴角度和角速度进行卡尔曼滤波
对mpu6050获得的X轴角度和角速度进行卡尔曼滤波 mpu6050得到的角度值有些值的偏差较大 xff0c 为了使平衡小车更加稳定 xff0c 需要对获得的角度进行优化 xff0c 使用 卡尔曼滤波 xff0c 代码如下 xff1a in
PX4中MPU6000数据读取程序的实现过程
MPU6000 measure 函数解析 MPU6000 measure mpu report 原始数据结构体对象 report 整合后数据结构体对象 interface gt read MPU6000 SET SPEED MPUREG I
mpu6000、mpu6050陀螺仪加速度计互补滤波数据融合算法原理推导
时间比较紧 xff0c 就只传照片了
陀螺仪加速度计MPU6050
转载自 xff1a http www crazepony com wiki mpu6050 html 陀螺仪 陀螺仪 xff0c 测量角速度 xff0c 具有高动态特性 xff0c 它是一个间接测量角度的器件 它测量的是角度的导数 xff0
MAG02 IMU传感器模块替代MPU6050模块介绍
MAG02模块内置TDK高精度6轴IMU 惯性测量单元 xff09 传感器芯片 xff0c 通过处理器读取传感器数据 xff0c 并经过内部复杂运算后通过串口输出加速度 xff0c 角速度 xff0c 角度等数据 xff0c 大大减轻了用户
模块学习(二)——MPU6050
去年电赛备赛期间 xff0c 学的STM32标准库 xff0c 那一整个繁琐直接给我劝退了 xff0c 当时学习MPU6050时就非常痛苦 xff0c 代码也看不懂 xff0c 无非抄来抄去 xff0c 然后就是编译 xff0c 改错 xf
Arduino操作MPU6050模块
MPU6050是集成三轴陀螺仪 xff0c 三轴加速度计 xff0c 温度传感器于一体的模块 本文档基于Adafruit MPU6050实现MPU6050模块基本操作 Adafruit MPU6050库 xff1a https github
MPU6050 简介
目录 关于MPU6050芯片 关于小板 关于厂家和DATASHEET 关于漂移 关于角加速度还是角速度 关于精度和量程 xff08 可调 xff0c 可选 xff09 关于功耗 xff0c 陀螺仪 43 加速器工作电流 xff1a 3 8m
mpu6050 z轴校准_技术科普丨TOF标定校准知多少?
近年来 xff0c 手机摄像头很大的一项技术革新是3D技术 xff0c 而很大部分的3D技术依托于TOF摄像头模组 关于TOF模组的原理和应用 xff0c 之前科普文有很多介绍 xff0c 此处不予赘述 今天我们来聊聊TOF的校准标定 TO
MPU6050 - 陀螺仪 - 技术总结
博主福利 xff1a 100G 43 电子设计学习资源包 xff01 http mp weixin qq com mp homepage biz 61 MzU3OTczMzk5Mg 61 61 amp hid 61 7 amp sn 61
MPU6050
1 个人总结 常用的MPU6050有八个针脚 xff0c VCC 跟GND 给模块供电 xff0c 模块通讯方式采用IIC通讯 xff0c SCL跟SDA为信号传递通道 xff0c XDA 跟 XCl是用来外接电磁传感器 xff0c 玩过M
MPU6050 获取角度理论推导(二)---6轴融合算法
接着上篇文章 https mp csdn net postedit 101777018 姿态角解算 互补滤波算法及理论推导 一般在程序中 姿态解算的方式有两种 一种是欧拉角法 一种是四元数法 这里不介绍欧拉角法 只介绍四元数法 互补滤波算法
MPU6050 获取角度理论推导(一)
当你搜到这篇文章的时候说明你已经在做陀螺仪的项目了 那么陀螺仪具体的东西应该不用多说 他其实就是一个获取原始数据然后通过DMP或者MCU的计算处理 然后得到角度的一个传感器 MPU6050内部集成了一个陀螺仪一个加速传感器还有DMP计算单元
随机推荐
vb6实现程序延时的几种方法
VB6在开发发贴机时 提交数据要用到延时程序 让程延时和等待 从网上找了三种方法 三种方法以最后一种最好用 第一种如果不DOEVENTS的话 会使人感觉程序无反应一样 有以下方法 xff1a 1 使用Windows API函数Sleep 新
初识SEO,SEO学习笔记一
SEO 是一种方法 更是一种思想 如果只是为了关键字 那他就只是一种工具 一种方法 工具和方法总有过时的时候 而思想 则可以通达 可以明朗 可以提升层次 应当明的有关SEO的几个概念 目标关键词和长尾关词 一直以来 对这个概念都是只能意会
【信号分析与处理】Matlab运算带有冲激函数的积分
syms t span class token punctuation span span class token comment 定义变量 span span class token keyword int span span class
【计算方法】Python二分法求解方程
span class token comment 二分法求方程零点 span span class token keyword from span math span class token keyword import span span
【信号分析与处理】-离散信号分析-MATLAB stem函数的使用
1 stem xff08 y xff09 1 1如果y是向量 xff0c 则从1开始每隔单位长度描点 行向量列向量描点效果相同 e g x 61 1 2 3 4 3 3 2 1 5 stem x 1 2如果y是一个n m矩阵 xff0c 则
基于Shape From Shading(SFS)原理的侧扫声呐海底三维重建项目进度记录
quad 本文主要用于记录 海底三维重建算法研究 课题毕业设计的进度与内容概括 quad 2021 12 24
【基于侧扫声呐和SFS方法的地形三维重构】(一)增益补偿和斜距校正
本文主要参考文献如下 1 王杰英 侧扫声呐图像的三维重构 D 浙江大学 2018 qquad 这里先向学长表示感谢 xff01 本文主要讲述了侧扫声呐原始图像需要进行的一些信号处理与图像处理步骤 增益补偿与斜距校正 xff0c 其他处理步骤
git教程
git本地操作 创建文件不丢失记录历史随时回退自动合并 xff0c 但也需要手动合并拥有强大的 分支 分布式 svn xff08 集中式 xff09 需要一台中央服务器git xff08 分布式 xff09 每人都有完成的版本git速度快一
【交叉编译踩坑指北(一)】windows10下Vscode与Cmake编译生成文件
1 工具链安装 工具链版本如下 C Users Lenovo gt cmake version cmake version 3 24 2 C Users Lenovo gt mingw32 make v GNU Make 4 2 1 Bui
【交叉编译踩坑指北(二)】windows10下VScode构建树莓派pico开发环境(C/C++)
写在前面 许多树莓派C C 43 43 开发都依靠NMake以及PicoProjectGenerator xff0c 安装配置NMake较为麻烦 需要安装VisualStudio 生成工具 xff0c 并且安装文件夹下有很多版本的nmake
【数集项目之 MCDF】(一) 控制寄存器 control_register
写在前面 本项目为MCDF数据整形器设计 xff0c 所有的参考代码见我的github https github com SuperiorLQF verilog ALL tree master MCDF 其中设计的参考文档见github文件
【屏幕驱动移植】点亮OLED屏幕并播放视频
写在前面 硬件软件准备 名称备注屏幕SSD1106本文章所使用的的屏幕型号 xff0c 仅仅作为驱动移植示例 xff0c 其他型号的都可以按照本文的方法推广树莓派3B用于驱动屏幕 xff0c 树莓派2B3B4B等型号都可以ESP32开发板用
【SOC架构】(一)同步与异步信号
写在前面 本章节主要参考 SOC设计方法与实现 第三版 第七章 也是整个SOC架构学习的起点 xff0c 下面我们正式开始 xff01 目前流行的设计架构 xff1a GALS xff08 Global Asynchronize Local
【基础篇0】Linux下ANACONDA与TF-LITE环境配置
0 写在前面 xff1a 一些摸索与总结 本着在学习在嵌入式Linux系统 xff08 例如树莓派 xff09 上运行AI项目 xff08 例如人脸识别 xff09 开启了这个嵌入式AI专题 xff0c 来记录学习进展和踩过的一些坑 对于L
【协议项目之 I2C】(一) 基本时序与实现
一 基本介绍 I2C协议 xff08 集成电路总线 xff09 使用两根线SDA和SCL实现数据传输 xff0c 其连接如下图所示 xff0c 总线上通过上拉电阻可以挂载各种低速外设 例如EEPROM 24C02 传感器等 使用I2C xf
表述编程语言(Declarative Programming Language)
在计算机科学中 表述程序语言是一种描述问题而不是定义解决方案的高级语言 一个表述程序语言描述问题 xff0c 而一个命令程序语言规定了要执行的命令 表述编程有两个定义 xff0c 目前都在使用 一种定义 xff0c 如果一个程序只是描述了某
关于互补滤波原理
先介绍一下互补滤波的基本概念 xff0c 这是阿莫论坛上一个会员的总结 xff1a 对mpu6050来说 xff0c 加速度计对四轴或小车的加速度比较敏感 xff0c 取瞬时值计算倾角误差比较大 xff1b 而陀螺仪积分得到的角度不受小车加
如何创建一个Mavlink Message(一)
一 创建一个新的MAVLink消息 MAVLink消息以XML格式定义 xff0c 然后转换为C C 43 43 xff0c C xff03 或Python代码 xff08 存在多个生成器 xff09 这里用公共心跳包来解释添加消息的过程
使用vscode创建git新分支
使用vscode创建git新分支 xff08 比如siot7 xff09 xff0c 创建的只是本地分支 xff0c 没有创建远程分支 在新分支 xff08 siot7 xff09 开发 xff0c 然后提交到远程新分支 xff08 sio
mpu6000、mpu6050陀螺仪加速度计互补滤波数据融合算法原理推导
时间比较紧 xff0c 就只传照片了
热门标签
gridsystem
statsd
baremetal
jcalendar
iana
longdouble
onhover
clregion
appauth
quickfixj
pcntl
jcaps