最近在学STM32,基本的学完了,想学几个模块来巩固一下知识,就想到了蓝牙模块。玩啥好难过有很多博客教怎么连的,但自己看起来还是有点糊涂。模块的原理和知识点我就不讲解了,这里我主要手把手记录一下我是如何对蓝牙模块进行学习和使用的。
所使用的资料和工具我会放在最后的链接里,大家有需要的可以自行下载。
模块名称:HC-05蓝牙串口通信模块
其他模块:USB转TTL模块、杜邦线、蓝牙串口助手app
蓝牙模块的前期调试
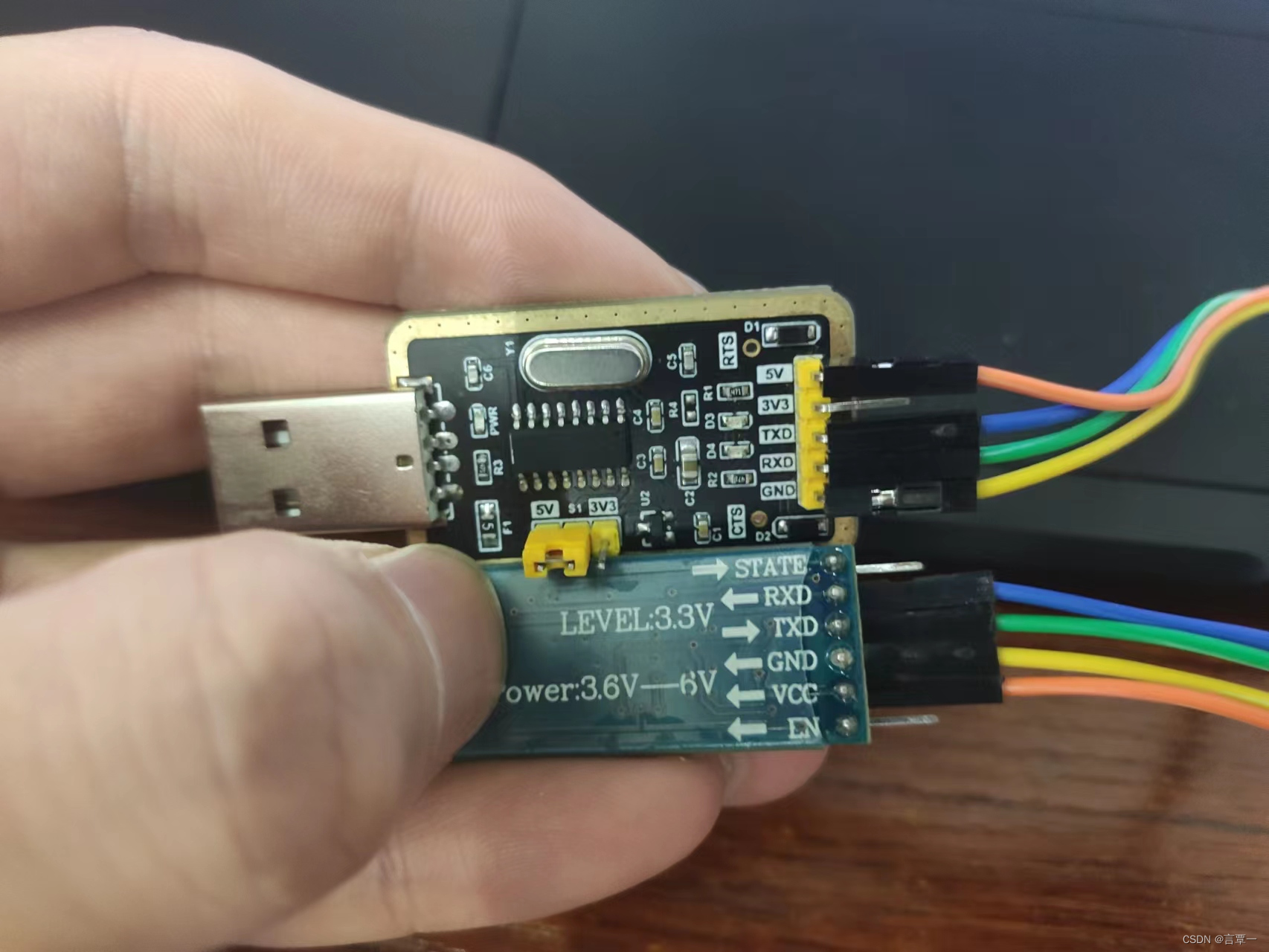
因为我们只是使用到蓝牙模块的透传功能,只需要用到4个引脚(RXT、TXD、GND、VCC)
先使用杜邦线将USB转TTL模块和HC-05蓝牙模块相连
两模块共电、共地、两模块的TX和RX交换相接(USB转TTL的TX(RX)接蓝牙的RX(TX))
如图所示:
然后将USB转TTL模块插到电脑上,通过串口助手进行调试。
蓝牙模块通讯模式有两种工作方式:命令响应工作模式和自动连工作模式(在自动连接工作模式下又可分为主、从和回环三种角色)
·当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输;
·当模块处于命令响应工作模式时能执行AT命令,用户可向模块发送各种AT 指令,为模块设定控制参数或发布控制命令。
如何进入命令响应:
给模块上电即插USB的时候,按住蓝牙HC-05模块的那个小按键,此时模块进入AT模式
蓝牙模块上有一个小灯,灯快闪的时候,就是自动连接模式。慢闪的时候,就是命令响应工作模式
命令响应模式的波特率固定为38400,可以直接使用串口助手发送AT指令。
AT命令
AT指令不区分大小写,但是都要以回车符结尾
下面是常用的AT指令
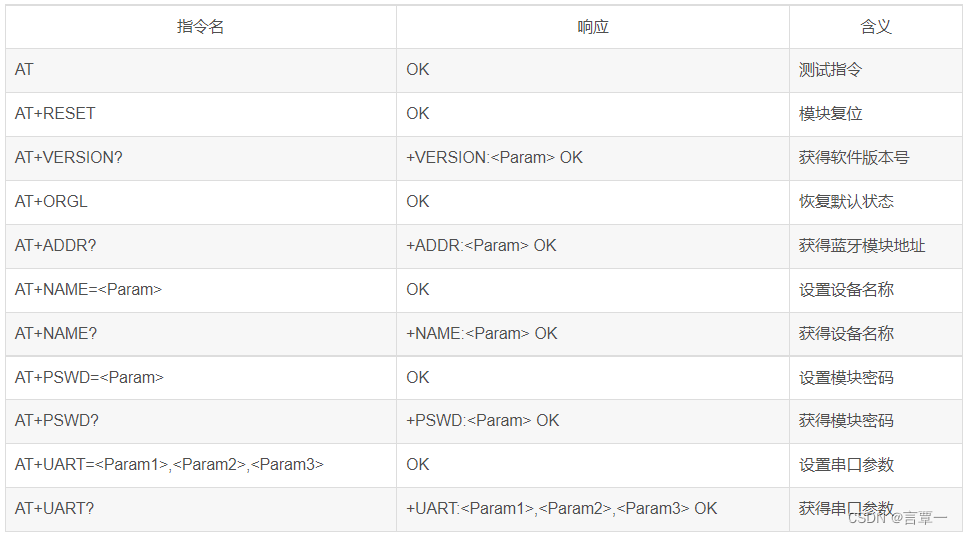
注意:AT+NAME?可能是没有返回数据的,我们直接设置蓝牙名称就可以了
我们接下来主要配置的就是
蓝牙名称和串口参数(波特率、停止位、校验位)
如图:

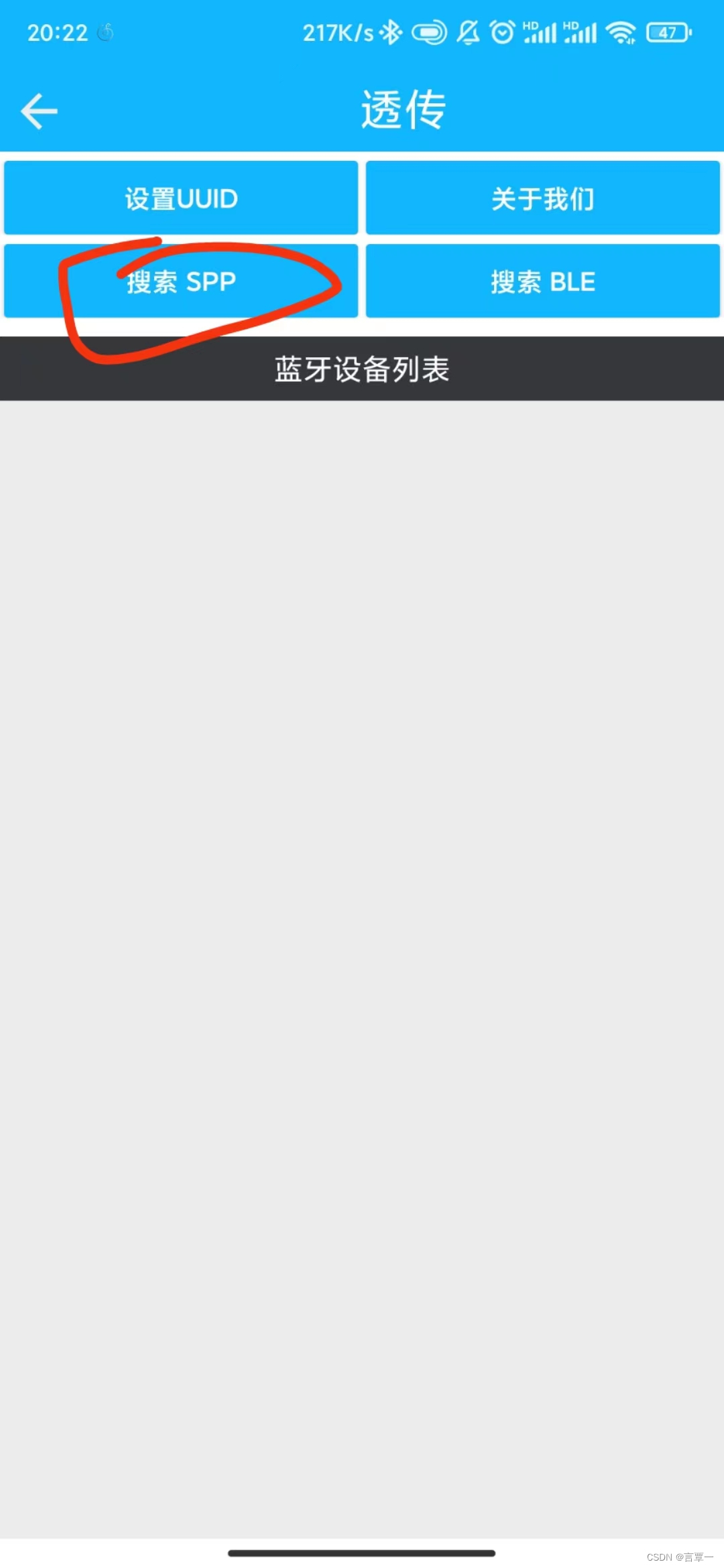
设置好之后把usb拔下来,重新上电的时候会默认为自动连接模式,此时使用手机的蓝牙助手对蓝牙模块进行连接,就可以通讯了。蓝牙助手我也会放在后面的资料链接里。

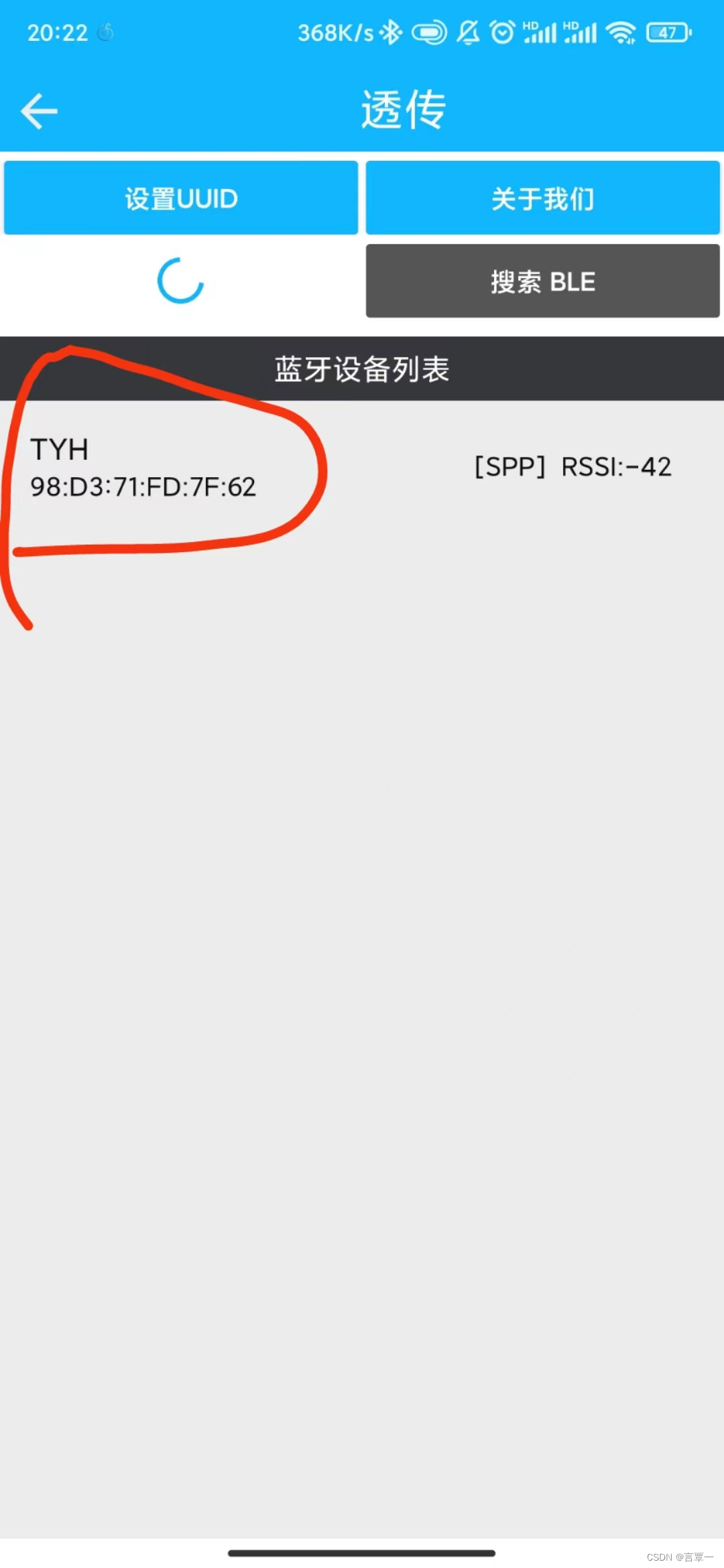

将串口助手波特率设置为115200,在手机蓝牙中发送信息,会在串口助手中显示出来。
最后,我们将在STM32开发板中连接蓝牙进行信息传输,控制LED灯
源码我将会放在后面的资料里一起打包。
这里我们使用串口1,因为串口1是我开发板的下载串口,所以要先下载代码之后再连接蓝牙模块的TX和RX,如果使用其他串口进行通讯改为其他串口即可,连接方式如图所示:
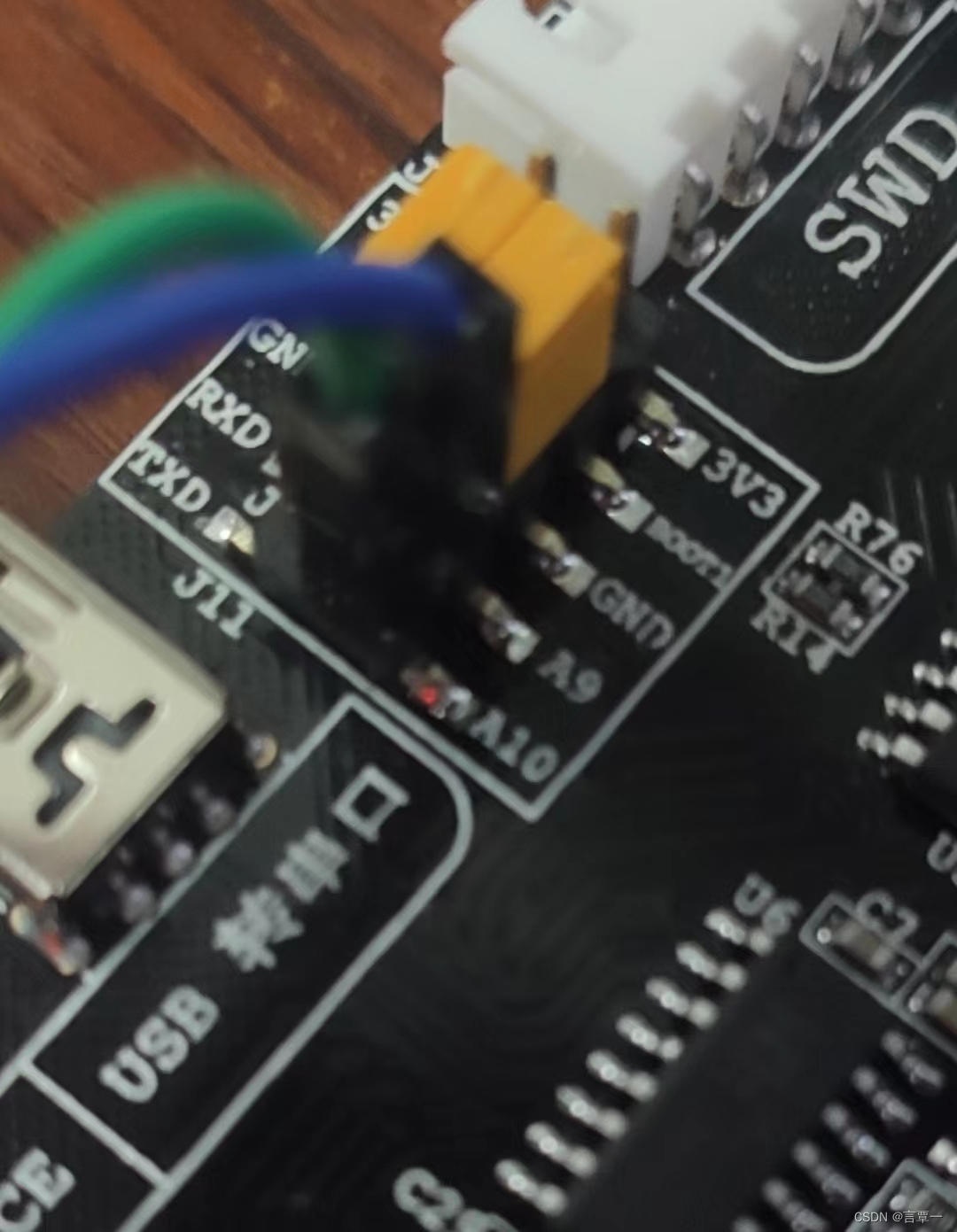
蓝牙模块的RX连PA9,TX连PA10,VCC接板载的5V,GND接板子的GND即可
由于我使用的是野火的开发板,所用到的LED灯是个RGB灯,大家只需要初始化一下串口,然后看一下main函数里面的逻辑来实现自己板子的LED灯即可。也可以在中断函数里对灯进行操作
接下来就可以举一反三,使用蓝牙返回信息等操作了。
资料有需要自行提取:链接:https://pan.baidu.com/s/1iGrbTiivAsTwzd9wDLYFaQ
提取码:3sp6
资料里面还有一个HC蓝牙助手,可以自定义按钮发送信息。
串口控制LED灯的代码如下:
usart.c:
#include "bsp_usart.h"
//static void NVIC_Configuration(void) //配置中断优先级,这里不使用中断,所以屏蔽
//{
// NVIC_InitTypeDef NVIC_InitStructure;
//
// /* 嵌套向量中断控制器组选择 */
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//
// /* 配置USART为中断源 */
// NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
// /* 抢断优先级*/
// NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
// /* 子优先级 */
// NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
// /* 使能中断 */
// NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// /* 初始化配置NVIC */
// NVIC_Init(&NVIC_InitStructure);
//}
void USART_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
// 打开串口GPIO的时钟
#include "stm32f10x.h" // Device header
DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);
// 打开串口外设的时钟
DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);
// 将USART Tx的GPIO配置为推挽复用模式
#include "stm32f10x.h" // Device header
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);
// 将USART Rx的GPIO配置为浮空输入模式
GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);
// 配置串口的工作参数
// 配置波特率
USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;
// 配置 针数据字长
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
// 配置停止位
USART_InitStructure.USART_StopBits = USART_StopBits_1;
// 配置校验位
USART_InitStructure.USART_Parity = USART_Parity_No ;
// 配置硬件流控制
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
// 配置工作模式,收发一起
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
// 完成串口的初始化配置
USART_Init(DEBUG_USARTx, &USART_InitStructure);
// // 串口中断优先级配置
// NVIC_Configuration();
//
// // 使能串口接收中断
// USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE);
// 使能串口
USART_Cmd(DEBUG_USARTx, ENABLE);
}
/* 发送一个字节 */
void Usart_SendByte(USART_TypeDef* pUSARTx, uint8_t data)
{
USART_SendData(pUSARTx, data);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}
/* 发送两个字节的数据 */
void Usart_SendHalfWord(USART_TypeDef* pUSARTx, uint16_t data)
{
uint8_t temp_h,temp_l;
temp_h = (data&0xff00) >> 8 ;
temp_l = data&0xff;
USART_SendData(pUSARTx, temp_h);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
USART_SendData(pUSARTx, temp_l);
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}
/* 发送8位数据的数组 */
void Usart_SendArray(USART_TypeDef* pUSARTx, uint8_t *array,uint8_t num)
{
uint8_t i;
for( i=0; i<num; i++ )
{
Usart_SendByte(pUSARTx, array[i]);
}
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}
/* 发送字符串 */
void Usart_SendStr(USART_TypeDef* pUSARTx, uint8_t *str)
{
uint8_t i=0;
do
{
Usart_SendByte(pUSARTx, *(str+i));
i++;
}while(*(str+i) != '\0');
while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{
/* 发送一个字节数据到串口 */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
main.c
int main(void)
{
uint8_t ch;
USART_Config();
LED_GPIO_Config();
printf( "这是一个串口控制RGB灯的程序\n" );
while (1)
{
ch = getchar();
printf( "ch=%c\n",ch );
switch(ch)
{
case '1': LED_RED;
break;
case '2': LED_GREEN;
break;
case '3': LED_BLUE;
break;
default: LED_RGBOFF;
break;
}
}
}
led.c
#include "bsp_led.h"
/**
* @brief 初始化控制LED的IO
* @param 无
* @retval 无
*/
void LED_GPIO_Config(void)
{
/*定义一个GPIO_InitTypeDef类型的结构体*/
GPIO_InitTypeDef GPIO_InitStructure;
/*开启LED相关的GPIO外设时钟*/
RCC_APB2PeriphClockCmd( LED1_GPIO_CLK | LED2_GPIO_CLK | LED3_GPIO_CLK, ENABLE);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED1_GPIO_PIN;
/*设置引脚模式为通用推挽输出*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
/*设置引脚速率为50MHz */
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED2_GPIO_PIN;
/*调用库函数,初始化GPIO*/
GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStructure);
/*选择要控制的GPIO引脚*/
GPIO_InitStructure.GPIO_Pin = LED3_GPIO_PIN;
/*调用库函数,初始化GPIOF*/
GPIO_Init(LED3_GPIO_PORT, &GPIO_InitStructure);
/* 关闭所有led灯 */
GPIO_SetBits(LED1_GPIO_PORT, LED1_GPIO_PIN);
/* 关闭所有led灯 */
GPIO_SetBits(LED2_GPIO_PORT, LED2_GPIO_PIN);
/* 关闭所有led灯 */
GPIO_SetBits(LED3_GPIO_PORT, LED3_GPIO_PIN);
}
/*********************************************END OF FILE**********************/
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)