论文地址
论文视频
文章导读
为什么要解读这篇文章?因为之前接连介绍该作者的两个工作,TEASER | 快速且可证明的点云配准算法和代码解读 和 基于四元数的存在外点Wahba问题的可证明最优解,前者的未知有界噪声,几何不变测量,内点选择最大团和SDP松弛思想均来自该工作,而后者和该工作共同组成了TEASER。所以为了彻底理解TEASER,就不得介绍本文。本文使用截断最小二乘将点云配准问题转化为优化问题,然后设计出可处理高外点率的多项式时间算法进行相对变换(尺度,旋转和平移)的计算。
摘要
提出了一种在存在大量外点的情况下两组3D点的鲁棒配准方法。第一个贡献是使用截断最小二乘(TLS)代价重新建模配准问题,该代价使得估计对大量外点不敏感。第二个贡献是一个解耦旋转、平移和尺度估计的通用框架,该框架允许级联地求解这三个量。但是每个子问题(尺度,旋转和平移估计)仍然是非凸和组合的,所以第三个贡献是证明(i)adaptive voting机制可以在多项式时间内精确地求解TLS尺度和分量形式的平移估计,(ii)TLS旋转估计可以被松弛为半定规划,并且该松弛实际上是紧的,甚至在极端外点率情况下也仍然是紧的。将提出的算法命名为TEASER(截断最小二乘估计和半定松弛),并在标准的3D配准基准上验证该算法,实验结果证明其超越了RANSAC和鲁棒的局部优化方法,比Branch-and-Bound方法效果更好。与此同时,这还是一个多项时间算法,十分快速。此外,TEASER可以处理高达99%外点率的情况,同时给出一个高精度的解。
动机
- 能够全局地求解配准问题,不需要依赖初始值;
- 能够忍受极端的外点数量,如99%的测量值都是外点;
- 能够在多项时间内运行;
- 能够提供正式的性能保证,也就是全局最优性保证。
主要贡献
- 使用截断最小二乘(TLS)代价重新建模配准问题,该代价对大量外点不敏感。将产生的问题称为截断最小二乘配准(TR)问题;
- 分离尺度,旋转和平移估计的通用框架。该方法的创新性有三个方面:(i)开发估计尺度的不变测量,(ii)在未知但有界噪声的框架下,将分离形式化。解耦使得可以级联地求解尺度,旋转和平移;
- 证明(i)使用adaptive voting机制能够在多项式时间内精确地求解标量情况的TLS估计,这样可以高效地估计尺度和(分量形式的)平移;(ii)通过寻找由不变测量定义的图的最大团来修剪大量的外点;(iii)建立一个紧的半定规划(SDP)松弛来估计旋转,(iv)在SDP松弛的性能上提供每个实例的界限。这是第一个可计算性能保证的外点鲁棒配准问题的多项式时间算法。
算法流程
- 使用截断最小二乘代价函数的鲁棒配准
1.1 原始问题
给定两组点云
A
=
{
a
i
}
i
=
1
N
\mathcal{A}=\left\{ a_i \right\}^N_{i=1}
A={ai}i=1N 和
B
=
{
b
i
}
i
=
1
N
\mathcal{B}=\left\{ b_i \right\}^N_{i=1}
B={bi}i=1N,满足:

其中,
ϵ
i
\epsilon_i
ϵi为测量噪声,
o
i
o_i
oi为inlier-outlier向量(内点为0向量,外点为任意向量)。
1.2 截断最小二乘配准模型
当一部分对应点云是外点时,需要引入鲁棒的模型去处理它们,这里引入截断最小二乘配准模型:

- 解耦尺度,旋转和平移估计
这部分内容是这篇文章的一大贡献,利用仿射变换具有空间距离不变性的思想,也就是分别来自两组点云的两个点之间的线段长度是(近似)相等的,进而重新转换测量值以得到尺度、旋转和平移变换的不变量。
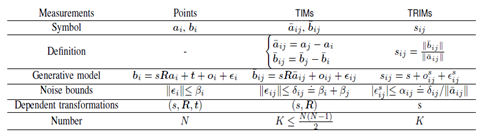
2.1 平移不变测量(TIM)
点的绝对位置是依赖于平移量
t
t
t,但是两个点之间的相对位置对于平移量是不变的,那么求取两组点
a
i
a_i
ai 和
b
i
b_i
bi 之间的相对位置就抵消掉了平移量
t
t
t:

因为,平移不变测量定义为
a
ˉ
i
j
=
.
a
j
−
a
i
\bar{a}_{ij} \overset{.}{=} a_j-a_i
aˉij=.aj−ai 和
b
ˉ
i
j
=
.
b
j
−
b
i
\bar{b}_{ij} \overset{.}{=} b_j-b_i
bˉij=.bj−bi,它们满足以下模型:

可以看到这个模型只依赖于未知的尺度
s
s
s 和旋转量
R
R
R,该不变量思想如图所示

2.2 平移和旋转不变测量(TRIM)
TIM 还是依赖于旋转量
R
R
R,但TIM的模长对于旋转量
R
R
R 和平移量
t
t
t 都是不变的,因此首先计算 TIM 的范数:

这里使用有界噪声,那么就可以得到:

然后将上式两边同时除以
∣
∣
a
ˉ
i
j
∣
∣
||\bar{a}_{ij}||
∣∣aˉij∣∣,就可以得到新的不变测量值
s
i
j
=
.
∣
∣
b
ˉ
i
j
∣
∣
∣
∣
a
ˉ
i
j
∣
∣
s_{ij} \overset{.}{=} \frac{||\bar{b}_{ij}||}{||\bar{a}_{ij}||}
sij=.∣∣aˉij∣∣∣∣bˉij∣∣:

可以看到这个测量值仅仅依赖于未知的尺度
s
s
s,该不变量思想如图所示

2.3 上述不变测量值的总结
- 配准算法:截断最小二乘估计和半定松弛(TEASER)
3.1 鲁棒尺度估计
使用平移和旋转不变测量
s
k
s_k
sk 和估计尺度
s
^
\hat{s}
s^,采用第4部分介绍的adaptive voting 算法进行估计:

3.2 鲁棒旋转估计
使用上式得到的尺度估计
s
^
\hat{s}
s^ 和平移不变测量TIM估计旋转
R
^
\hat{R}
R^,采用第5部分介绍的半定松弛和快速证实算法进行估计:

3.3 鲁棒平移估计
在截断最小二乘配准模型中使用上面得到的尺度估计
s
^
\hat{s}
s^ 和旋转估计
R
^
\hat{R}
R^,从
(
a
i
,
b
i
)
(a_i,b_i)
(ai,bi) 估计粗平移
t
^
\hat{t}
t^ 的三个分量,采用第4部分介绍的 adaptive voting 算法进行三个分量的估计:

3.4 TEASER算法

- 尺度,旋转和平移三个子问题的具体求解
4.1 鲁棒的尺度估计
给定标量尺度
s
s
s,定义一致集
C
(
s
)
=
{
k
:
(
s
−
s
k
)
α
k
2
≤
c
ˉ
2
}
\mathcal{C}(s)=\left\{ k: \frac{(s-s_k)}{\alpha^2_k} \le \bar{c}^2 \right\}
C(s)={k:αk2(s−sk)≤cˉ2}。对任何
s
s
s,最多有
2
K
−
1
2K-1
2K−1 个不同的非空一致集,将这些一致集命名为
C
1
,
.
.
.
,
C
2
K
−
1
\mathcal{C_1},...,\mathcal{C_{2K-1}}
C1,...,C2K−1,那么可以通过枚举公式(6)的解:

上式可以直接采用 adaptive voting 算法来求取

上述算法第4行见Fig. 3(a),第6、12行见Fig. 3(b)

4.2 鲁棒的旋转估计
这部分是本文的另一大贡献,设计一个计算旋转估计的紧的凸松弛,并且该松弛对于高外点率情况仍然能够保持紧度。
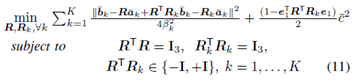
4.2.1 二值模型和克隆
引入辅助的二值变量
θ
k
\theta_k
θk,将(7)改写为:

然后使用合适的正交矩阵代替二值变量,将(10)改写为以下二值克隆问题:
4.2.2 凸松弛
将(11)中所有未知变量堆叠起来,组成一个
3
×
3
(
K
+
2
)
3 \times 3(K+2)
3×3(K+2) 矩阵
X
=
[
I
3
,
R
,
R
1
,
.
.
.
,
R
K
]
X=[I_3,R,R_1,...,R_K]
X=[I3,R,R1,...,RK],然后可以发现矩阵
Z
=
X
X
T
Z=XX^T
Z=XXT 的元素包含所有
R
R
R 和
R
K
R_K
RK 的线性项和二次项:
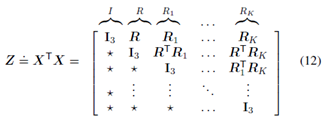
进一步发现(11)中的目标函数和约束都可以使用矩阵
Z
Z
Z 的函数来表示,并且
Z
Z
Z 是秩为3的半正定矩阵,那么就可以使用
Z
Z
Z 来改写问题(11),从而设计出一个凸松弛:
其中用到的技巧是在添加冗余约束((13)中最后两个约束)和舍弃秩约束(
r
a
n
k
(
Z
)
=
3
rank(Z)=3
rank(Z)=3),因此(13)是(11)的凸松弛,可以使用凸算子在多项式时间内求解得到最优解
Z
∗
Z^*
Z∗。如果
Z
∗
Z^*
Z∗ 的秩为3,可以将其分解为
Z
∗
=
(
X
∗
)
T
(
X
∗
)
Z^*=(X^*)^T(X^*)
Z∗=(X∗)T(X∗),
X
∗
=
.
[
I
3
,
R
∗
,
R
1
∗
,
.
.
.
,
R
K
∗
]
X^*\overset{.}{=}[I_3,R^*,R^*_1,...,R^*_K]
X∗=.[I3,R∗,R1∗,...,RK∗] 是矩阵
Z
∗
Z^*
Z∗ 的第一行矩阵块,并且
R
∗
,
R
1
∗
,
.
.
.
,
R
K
∗
R^*,R^*_1,...,R^*_K
R∗,R1∗,...,RK∗ 是(11)的最优解。
这里作者并没有给出这个凸松弛紧度的分析,也就是没有从理论上证明该凸松弛是紧的,而是通过后续的实验结果从经验上说明该松弛是紧的(也就是产生秩为3的解)。那么问题是,如果该凸松弛得到的解不是紧的,即
Z
∗
Z^*
Z∗ 的秩不为3,该怎么办?其实可以通过将
Z
∗
Z^*
Z∗ 投影到流形
O
(
3
)
O(3)
O(3) 得到结果解的次优程度的上界,作为旋转估计
R
^
\hat{R}
R^。
4.3 鲁棒的平移估计
类似于4.1,同样可以使用 adaptive voting 算法来求解平移估计,也就是使用三次算法2分别求解平移向量的三个分量
t
^
j
\hat{t}_j
t^j,得到每个分量的估计值,最终组成平移估计值
t
^
=
[
t
^
1
t
^
2
t
^
3
]
T
\hat{t}=[\hat{t}_1 \ \hat{t}_2 \ \hat{t}_3]^T
t^=[t^1 t^2 t^3]T:

主要实验结果
- 标准数据集的benchmarking
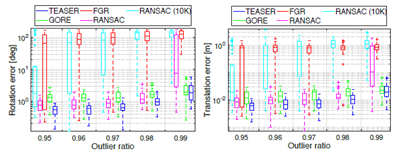
未知尺度情况下,与Fast Global Registration (FGR)、Guaranteed Outlier REmoval (GORE) 和RANSAC两种变体进行精度的比较,分别评估尺度,旋转和平移误差

- 极端外点率(外点率为95%-99%)的测试
- 目标位姿估计和定位
输入为含噪声的FPFH特征描述子建立的对应点,其中含有大量外点(蓝色线),绿色线为内点,红色部分为最终配准的目标

总结
这个工作提出了一个基于截断最小二乘模型计算相对变换(尺度,旋转和平移)的算法,用于极端外点率情况的点云配准问题。虽然该方法对外点很鲁棒,计算速度也比较快,但也是存在一些问题和改进点的:
- 实验中问题规模不大,这里受限制的原因是通用的SDP算子在大规模问题上会计算很慢,可以预见该方法在大规模点云配准上会表现不佳,作者也没有给出算法的效率测试,所以可以通过设计特定的SDP算子来实时地求解大规模配准问题,可以参考 IJRR18 的经典论文 “SE-Sync: a certifiably correct algorithm for synchronization over the Special Euclidean group.”;
- 旋转估计中使用的凸松弛,并不是一个经过理论证明(certifiable)的紧凸松弛,不过作者在之后的TRO20 TEASER 工作中对其进行了证明,从理论上分析和保证了紧度。
该工作使用的估计理论中的未知但有界噪声,几何中的不变测量,图理论中的内点选择最大团和优化中的SDP松弛这些理论和技巧均出现在之前介绍过的作者TRO20 TEASER工作中;该工作的旋转估计部分在作者ICCV2019 “A Quaternion-based Certifiably Optimal Solution to the Wahba Problem with Outliers”中进行了改进,即将旋转参数化为四元数。所以该工作和ICCV2019共同组成了TEASER的前置工作,说明了作者这一系列工作的连贯性,并且这些工作都是理论和开源效果俱佳,非常值得关注和学习。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)