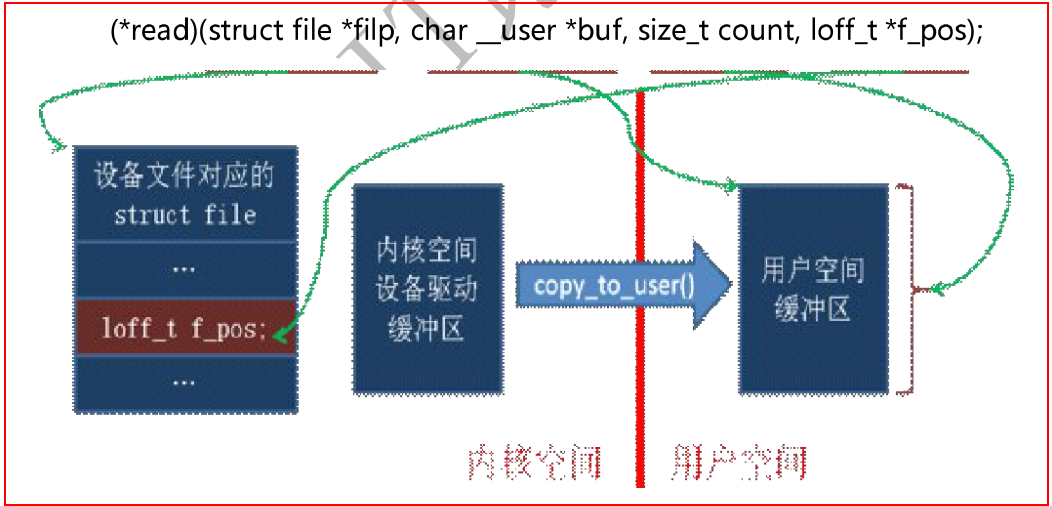
设备读操作
如果该操作为空,将使得read系统调用返回负EINVAL失败,正常返回实际读取的字节数
ssize_t (*read)(struct file *filp, char __user *buf, size_t count, lofft *f_pos);
filp:待操作的设备文件file结构体指针
buf:待写入所读取数据的用户空间缓冲区指针
count:待读取数据字节数
f_pos:待读取数据文件位置,读取完成后根据实际读取字节数重新定位
返回:成功实际读取的字节数,失败返回负值
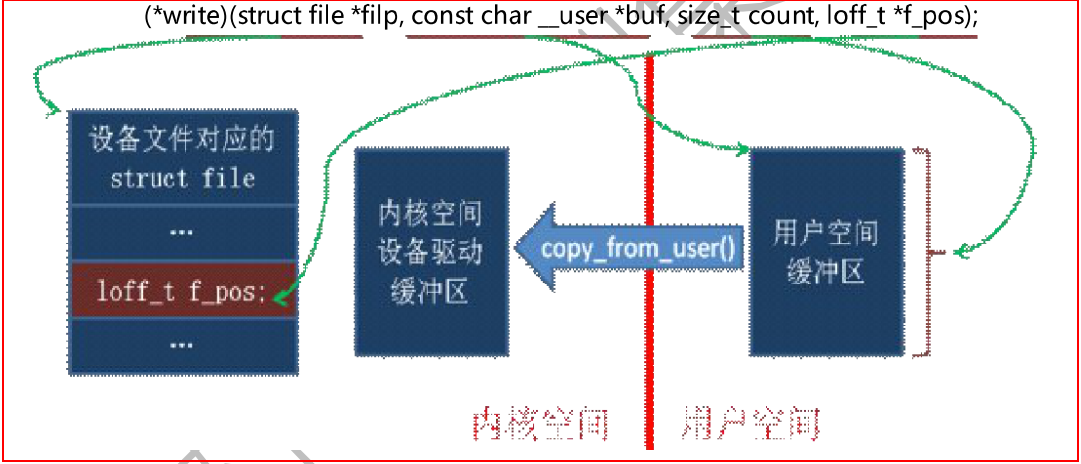
设备写操作
如果该操作为空,将使得write系统调用返回负EINVAL失败,正常返回实际写入的字节数
ssize_t (*write)(struct file *filp, const char __user *buf, size_t count, loff_t *f_pos);
filp:待操作的设备文件file结构体指针
buf:待写入所读取数据的用户空间缓冲区指针
count:待读取数据字节数
f_pos:待读取数据文件位置,写入完成后根据实际写入字节数重新定位
返回:成功实际写入的字节数,失败返回负值
内核为驱动程序提供在内核空间和用户空间传递数据的方法
定义在arch/arm/include/asm/uaccess.h中
用户空间-->内核空间
copy_from_user函数
unsigned long copy_from_user(void *to, const void *from, unsigned long n);
to:目标地址(内核空间)
from:源地址(用户空间)
n:将要拷贝数据的字节数
返回:成功返回0,失败返回没有拷贝成功的数据字节数
get_user宏
int get_user(data, ptr);
data:可以是字节、半字、字、双字类型的内核变量
ptr:用户空间内存指针
返回:成功返回0,失败返回非0
-----------------------------------------------------------------------------------------------
内核空间-->用户空间
copy_to_user函数
unsigned long copy_to_user(void *to, const void *from, unsigned long n)
to:目标地址(用户空间)
from:源地址(内核空间)
n:将要拷贝数据的字节数
返回:成功返回0,失败返回没有拷贝成功的数据字节数
put_user宏:
int put_user(data, prt)
data:可以是字节、半字、字、双字类型的内核变量
ptr:用户空间内存指针
返回:成功返回0, 失败返回非0
/**
*Copyright (c) 2013.TianYuan
*All rights reserved.
*
*文件名称: char_device_driver08.c
*文件标识: copy_to_user 、copy_from_user函数的使用
*
*当前版本:1.0
*作者:wuyq
*
*取代版本:xxx
*原作者:xxx
*完成日期:2013-11-28
*/
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/slab.h>
#include <asm/uaccess.h>
MODULE_LICENSE("GPL");
#define CDD_MAJOR 200//cat /proc/devices找一个尚未使用的
#define CDD_MINOR 0
#define CDD_COUNT 10
dev_t dev = 0;
u32 cdd_major = 0;
u32 cdd_minor = 0;
struct class *dev_class = NULL;
#define BUF_SIZE 100
struct cdd_cdev{
struct cdev cdev;
struct device *dev_device;
u8 led;
char kbuf[BUF_SIZE];
};
struct cdd_cdev *cdd_cdevp = NULL;
int cdd_open(struct inode* inode, struct file *filp)
{
struct cdd_cdev *pcdevp = NULL;
printk("enter cdd_open!\n");
pcdevp = container_of(inode->i_cdev, struct cdd_cdev, cdev);
printk("led = %d\n", pcdevp->led);
filp->private_data = pcdevp;
return 0;
}
int cdd_read(struct file *filp, char __user *buf, size_t count, loff_t *offset)
{
int ret = 0;
struct cdd_cdev *cdevp = filp->private_data;
printk("enter cdd_read!\n");
ret = copy_to_user(buf, cdevp->kbuf, count);
printk("kernel kbuf content:%s\n", cdevp->kbuf);
return ret;
}
int cdd_write(struct file *filp, const char __user *buf, size_t count, loff_t *offset)
{
int ret = 0;
struct cdd_cdev *cdevp = filp->private_data;
printk("enter cdd_write!\n");
ret = copy_from_user(cdevp->kbuf, buf, count);
return ret;
}
int cdd_ioctl(struct inode *inode, struct file *filp, unsigned int cmd, unsigned long data)
{
printk("enter cdd_ioctl!\n");
return 0;
}
int cdd_release(struct inode *inode, struct file *filp)
{
printk("enter cdd_release!\n");
return 0;
}
struct file_operations cdd_fops = {
.owner = THIS_MODULE,
.open = cdd_open,
.read = cdd_read,
.write = cdd_write,
.ioctl = cdd_ioctl,
.release = cdd_release,
};
int __init cdd_init(void)
{
int ret = 0;
int i = 0;
if(cdd_major){
dev = MKDEV(CDD_MAJOR, CDD_MINOR);//生成设备号
//注册设备号;1、要注册的起始设备号2、连续注册的设备号个数3、名字
ret = register_chrdev_region(dev, CDD_COUNT, "cdd_demo");
}else{
// 动态分配设备号
ret = alloc_chrdev_region(&dev, cdd_minor, CDD_COUNT, "cdd_demo02");
}
if(ret < 0){
printk("register_chrdev_region failed!\n");
goto failure_register_chrdev;
}
//获取主设备号
cdd_major = MAJOR(dev);
printk("cdd_major = %d\n", cdd_major);
cdd_cdevp = kzalloc(sizeof(struct cdd_cdev)*CDD_COUNT, GFP_KERNEL);
if(IS_ERR(cdd_cdevp)){
printk("kzalloc failed!\n");
goto failure_kzalloc;
}
/*创建设备类*/
dev_class = class_create(THIS_MODULE, "cdd_class");
if(IS_ERR(dev_class)){
printk("class_create failed!\n");
goto failure_dev_class;
}
for(i=0; i<CDD_COUNT; i++){
/*初始化cdev*/
cdev_init(&(cdd_cdevp[i].cdev), &cdd_fops);
/*添加cdev到内核*/
cdev_add(&(cdd_cdevp[i].cdev), dev+i, 1);
/* “/dev/xxx” */
device_create(dev_class, NULL, dev+i, NULL, "cdd%d", i);
cdd_cdevp[i].led = i;
}
return 0;
failure_dev_class:
kfree(cdd_cdevp);
failure_kzalloc:
unregister_chrdev_region(dev, CDD_COUNT);
failure_register_chrdev:
return ret;
}
void __exit cdd_exit(void)
{
/*逆序消除*/
int i = 0;
for(; i < CDD_COUNT; i++){
device_destroy(dev_class, dev+i);
cdev_del(&(cdd_cdevp[i].cdev));
//cdev_del(&((cdd_cdevp+i)->cdev));
}
class_destroy(dev_class);
kfree(cdd_cdevp);
unregister_chrdev_region(dev, CDD_COUNT);
}
module_init(cdd_init);
module_exit(cdd_exit);
/**
*Copyright (c) 2013.TianYuan
*All rights reserved.
*
*文件名称: char_device_driver08_test.c
*文件标识: 测试程序:测试内核空间的copy_to_user、copy_frome_user
* 执行:先./char_device_driver08_test 再cat /dev/cdd0 cat /dev/cdd5观察两者的区别
*当前版本:1.0
*作者:wuyq
*
*取代版本:xxx
*原作者:xxx
*完成日期:2013-11-28
*/
#include <stdio.h>
#include <fcntl.h>
#include <stdlib.h>
/*手工创建设备节点文件
mknod /dev/cdd c 248 0
*/
int fd = 0;
char rbuf[100];
char wbuf[100] = "nihao!\n";
int main()
{
char ch;
fd = open("/dev/cdd5", O_RDWR);
if(fd < 0){
printf("open failed!\n");
return -1;
}
printf("open successed fd = %d\n", fd);
while(1)
{
printf("starting to test /dev/cdd...\n");
ch = getchar();
getchar();//取走回车
if(ch == 'q'){
break;
}
switch(ch){
case 'r':
read(fd, rbuf, 100);
printf("user space from kernel: %s\n", rbuf);
break;
case 'w':
write(fd, wbuf, 100);
break;
case 'o':
ioctl(fd, 0, 0);
break;
default:
break;
}
sleep(1);
}
close(fd);
return 0;
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)