系列文章目录
自动控制理论(1)——自动控制理论概述
自动控制理论(3)——控制系统的数学模型(系统框图和信号流图)
文章目录
- 系列文章目录
- 一、线性系统的微分方程
- 1.微分方程的建立
- 2.拉式变换
- 3.拉式反变换
- 3.拉式变换求解微分方程
- 二、传递函数
- 1.定义
- 2.性质
- 3.两种标准形式
- 4.典型环节及其传递函数
- (1)比例环节
- (2)惯性环节
- (3)积分环节
- (4)微分环节
- (5)振荡环节
- (6)延迟环节
一、线性系统的微分方程
1.微分方程的建立
1、确定系统输入,输出
2、按照传递,据基本定律列原始方程组
3、消去中间变量,得输入输出微分方程
4、标准化
2.拉式变换

3.拉式反变换

3.拉式变换求解微分方程
1、方程两边取拉式变换,并代入初始条件
2、写出输出量的拉式变换
3、对输出量拉式反变换
二、传递函数
1.定义
在线性定常系统中,当初始条件为零时,系统输出的拉氏变换与输入的拉氏变换之比。
2.性质
1、只适用于初始条件为0的线性定常系统
2、只反映输入与输出的动态联系,不能反映系统内部信息
3、只取决于系统的结构和参数,与输入无关
4、是单位脉冲响应的拉式变换
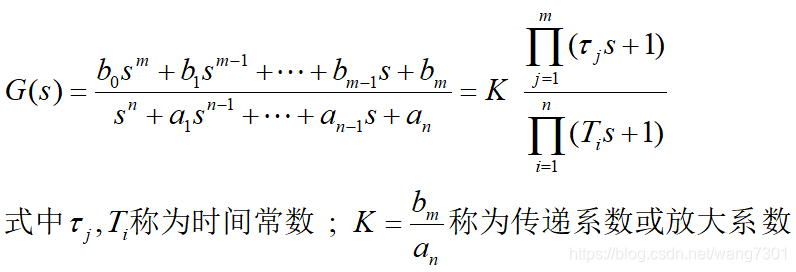
3.两种标准形式
1、零极点表达式

2、时间常数表达式
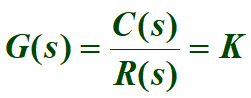
4.典型环节及其传递函数
(1)比例环节

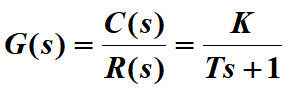
(2)惯性环节
(3)积分环节

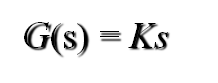
(4)微分环节
(5)振荡环节



(6)延迟环节
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)