摘 要: 针对盲区中使用INS惯性导航系统进行定位存在误差积累的问题,提出一种基于DR航位推算、GPS全球定位系统和MM地图匹配的组合定位系统数据融合算法。该算法利用GPS和MM中得到的位置信息,一方面用于更新DR的定位信息,另一方面用于修正陀螺仪比例因子和里程表比例因子等参数,提高定位精度,防止DR系统推导的车辆定位误差的积累。通过MATLAB进行仿真实验,验证了此算法的有效性。实验结果表明,此算法可以有效约束INS的误差积累,提升导航系统的性能。
关键词: 组合定位系统;航位推算;地图匹配;模糊控制
0 引言
车辆的盲区定位问题一直是业界的研究热点[1]。目前盲区中主要使用惯性导航系统(Inertial Navigation System,INS)。但是INS存在一个致命的问题,即定位误差会随着时间而积累[2]。
参考文献[3]介绍了一种对GPS定位数据进行采集和分离并采用电子地图组合定位,以纠正误差积累的方法。参考文献[4]介绍了一种利用全球导航卫星系统(Global Navigation Satellite System,GNSS)、INS和车道检测标志三者相结合的定位系统,在此系统中,GNSS/ INS定位方法的漂移误差由车道检测标记进行补偿修正。
本文提出一种基于DR/GPS/MM组合定位系统的数据融合算法。该算法融合DR和GPS的位置信息作为MM系统的输入,然后MM系统的输出将用于更新和修正DR的参数,这样可以提高定位精度,防止DR系统推导的车辆定位误差的积累。
1 系统架构
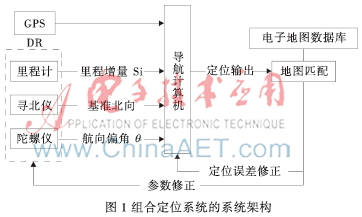
本系统中,DR系统被定为主要的导航系统,GPS和MM作为辅助系统。组合定位系统的系统架构如图1所示。
1.1 DR误差分析
DR误差模型如图2所示,点A(x,y)是车辆的实际位置,而点missing image file是DR系统测量得出的位置。γ代表方位角,n是里程表在采样时间tk内的脉冲数,K0是里程系数,xk和yk分别是采样时间tk内北向和东向的坐标增量,OA是时间tk内的里程增量[5]。
误差模型可以列为以下方程:

在时间t时的方位角误差定义如下:

在这里δγ0是初始误差;Kg是陀螺仪的比例因子,它受到温度、道路倾向等因素的影响;w(τ)是角速率;δg~N(0,σ02)。
2 基于DR/GPS/MM的组合定位系统数据融合算法
在本章中,首先将详细讨论基于模糊逻辑的MM算法,然后提出一种基于DR/GPS/MM组合定位系统的融合算法。
2.1 基于模糊逻辑的MM算法
基于模糊逻辑的MM算法主要分为两步:(1)道路选择;(2)坐标投影。
MM系统的输入包括DR系统输出的坐标(x,y)、方位角和里程数据。MM系统会根据规则来寻找有最大相似值的道路,然后投影当前位置到所选的道路上去。在道路选择阶段有两条规则。
道路选择的第一条规则:假设车辆和道路之间的方位角差值在一定范围内,距离相似系数可以由模糊公式获得:

在这里Ksd代表距离相似性,Ksa代表方位角相似性。
Ksd可以由函数fd获得:

其中d是车辆到相关的道路之间的距离。
Ksa可以由函数fa获得:

其中δγ是车辆与相关的道路之间的方位角的差值[6]。
道路选择的第二个规则:如果在选择的道路上连续几个测试点的相似度值都保持在高水平,那么就假设这辆车行驶在这条道路上。
当车辆正在行驶的道路被选择之后,接着进行坐标投影阶段。在这一阶段,当前的显示车辆位置的点将被投影到选择的道路上[7]。
2.2 数据融合算法
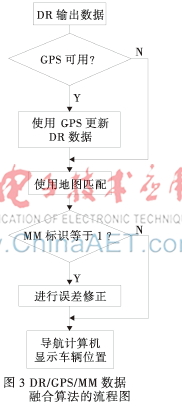
MM系统投影车辆的位置坐标到被选择的道路上,然后将处理过的数据反馈给DR系统。同时,GPS信号通过另一个频道传播给DR。数据融合过程是在DR系统中进行的。该算法包括两个部分:(1)导航信息更新;(2)纠错和校准。该过程如图3所示。
MM数据在某些条件下是不可靠的:(1)车辆不是行驶在路上;(2)汽车定位到错误的道路上去。这两个条件可以由一个涉及DR的位置和预计位置的模糊函数来定义,同时方位的差异可以由式(7)描述。
如果Z大于0.7,则MM标识就等于1,就认为MM数据是可靠的,可以用于DR系统的纠错[8]。
2.3 DR误差修正
2.3.1 方位角误差修正
式(3)里提到,方位角误差δγ(t)包含3个部分,分别是初始方位角误差δγ0、转换误差missing image file以及噪声误差δg。
当车辆改变行驶方向,从一条道路切换到另一条道路时,陀螺仪比例因子Kg可以被修正。
一辆车以角度θ1沿着道路AB行驶,然后改变角度为θ2切换到道路BC行驶。选择道路切换前的一个投影P1以及道路切换后的一个投影P2。陀螺仪转变的角度为
 。根据电子地图数据库,这两条道路的角度差值定义为
。根据电子地图数据库,这两条道路的角度差值定义为
 。
。
修正后的陀螺仪比例因子可以由下式得出:

当车辆行驶在一条直行道路上时,可以计算出δγ0的值。
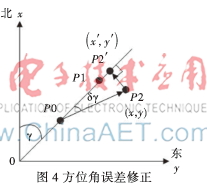
如图4所示,车辆从P0点行驶到P1点,DR系统的输出为P2点,MM系统将P2纠正为P'2点,δγ0可以由公式(9)计算得出:
2.3.2 里程表比例因子修正
当车辆行驶在直行道路上时,选择由导航系统给出的K个坐标点(xi,yi)以及经过地图匹配过后的K个坐标点
 。K0是初始里程表比例因子,修正后的里程表比例因子可以由下式计算得出:
。K0是初始里程表比例因子,修正后的里程表比例因子可以由下式计算得出:

3 仿真结果与分析
3.1 仿真结果
本文使用的仿真工具是MATLAB7.0,并根据仿真结果分析来验证上述算法。为方便起见,本文选择直行路段进行仿真,这里每隔0.5 s进行一次定位,假设每个时间段内车辆速度和方位角都保持恒定,且各个时间段之间的车辆速度和方向角都不相同。
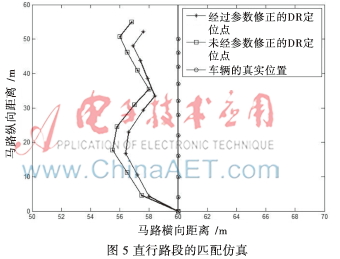
如图5所示,考虑车辆行驶在直行路段,图中间的竖线表示车辆行驶的道路,竖线上的圆点是车辆的真实定位点,正方形点是DR系统在没有经过参数修正前得到的定位点,而星点是DR系统经过参数修正后得到的改进后的定位点。
3.2 仿真分析
由图5可以看出,经过参数修正的DR系统得到的定位点相比未经过参数修正的DR系统得到的定位点更加靠近车辆行驶的道路,行驶距离也更精确。这是由于本文提出的算法所具有的参数修正作用,可以通过修正陀螺仪比例因子与里程表比例因子,使得每个时间间隔内的车辆航向角和车辆行驶速度的误差减小,更趋近于真实方位角和真实行驶速度,从而减小DR系统的定位误差,提高车辆的定位精确度。同时,本文提出的算法还可以将参数修正后的DR系统得到的定位点投影到车辆行驶着的道路上,使得定位结果更加精确。
4 结论
本文提出一种基于DR/GPS/MM的组合定位系统数据融合算法,此算法可以通过修正DR的参数来约束惯性导航系统的误差。仿真结果表明,此算法可以有效地提升导航系统的性能。
参考文献
[1] Maki T, Matsuda T, Sakamaki T, et al. Navigation method for underwater vehicles based on mutual acoustical positioning with a single seafloor station[J]. IEEE Journal of Oceanic Engineering, 2013, 38(1):167-177.
[2] Atia M, Donnelly C, Noureldin A, et al. A novel systems integration approach for multisensor integrated navigation systems[C]. Systems Conference (SysCon), 2014:554-558.
[3] 罗杰涛. 智能交通系统中GPS地图匹配算法设计与实现[D].北京:北京交通大学, 2012.
[4] Fouque C, Bonnifait P. Matching raw GPS measurements on a navigable map without computing a global position[J]. IEEE Transactions on Intelligent Transportation Systems, 2012, 13(2):887-898.
[5] Wahab A A, Khattab A, Fahmy Y A. Two-way TOA with limited dead reckoning for GPS-free vehicle localization using single RSU[C]. ITS Telecommunications (ITST), 2013:244-249.
[6] 丁宗富. 地图匹配与路径规划算法在导航系统中的应用研究[D]. 阜新:辽宁工程技术大学, 2011.
[7] 李云洁. 汽车导航系统中地图匹配算法的研究与实现[D]. 长春: 吉林大学,2006.
[8] Dalu G, Ailong F. Power distribution network reconfiguration based on fuzzy control theory and ant colony algorithm[C]. 2011 International Conference on Electronic and Mechanical Engineering and Information Technology (EMEIT), 2011, 3(1):1230-1232.