多图。具体内容有空补充,或直接看最后链接。
朴素描述:
camera 是一个集成 soc,挂载在 platform 总线上,属于 platform_device,相应驱动为 platform_driver。
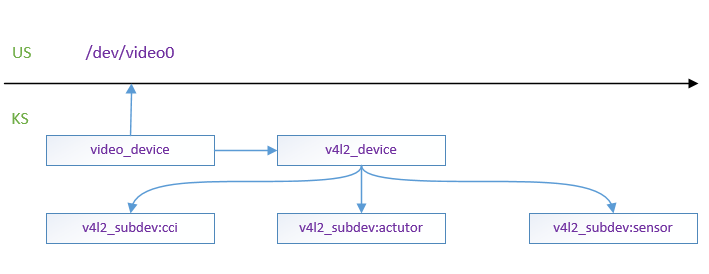
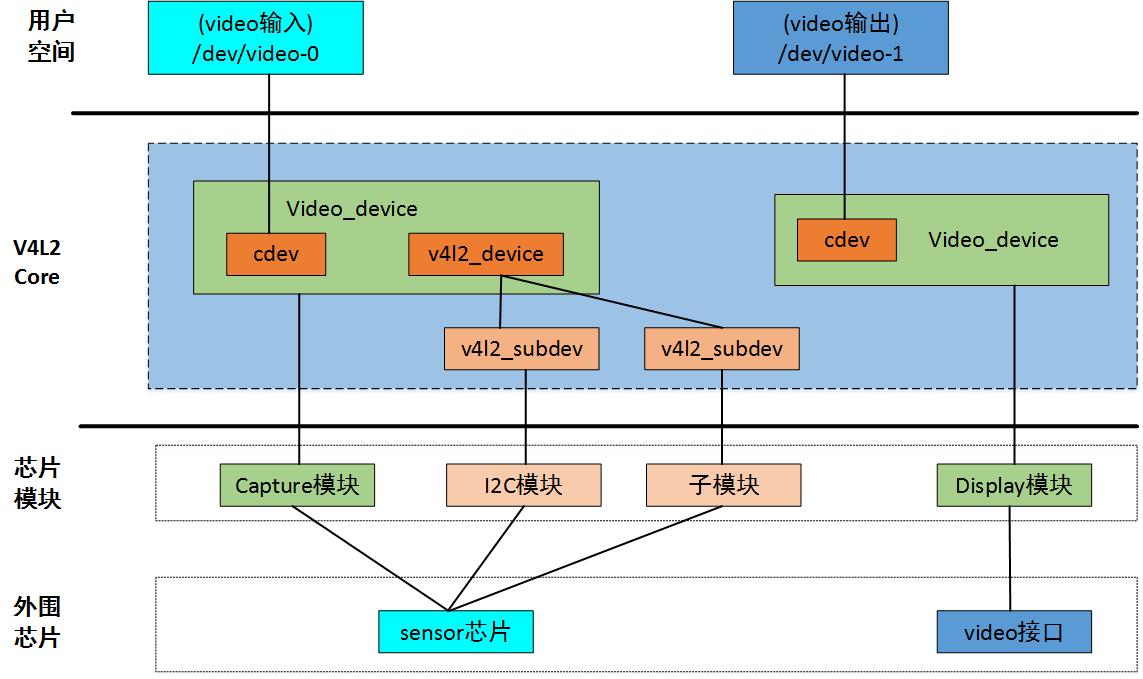
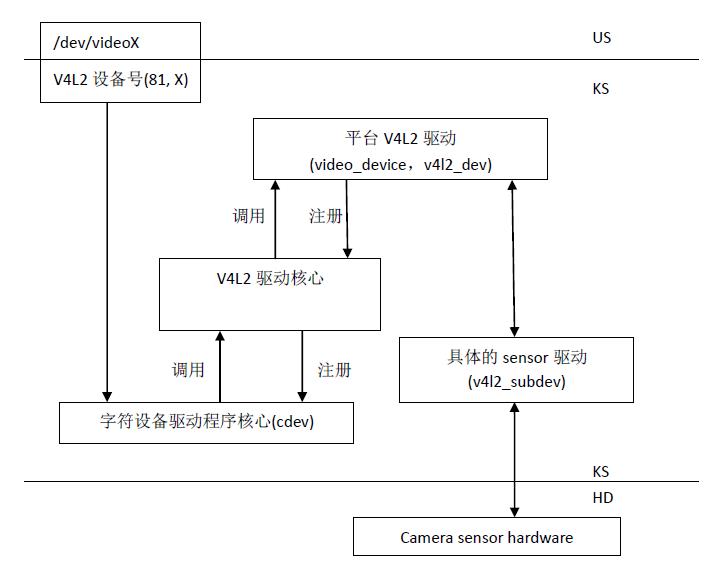
US和KS代表 user space 和 kernel space。
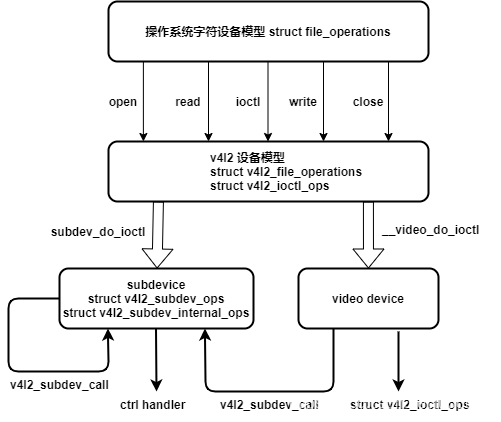
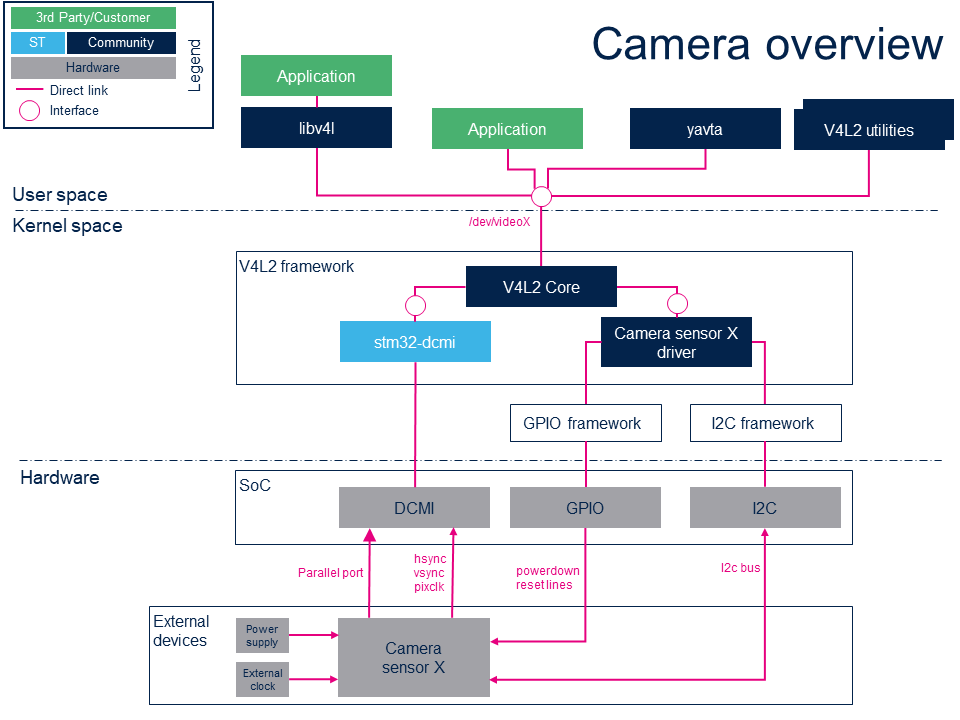
video_device 创建设备节点 /dev/videoX,用来做内核空间与用户空间的交互。camera 定义为一个 v4l2_device 实例,sensor感光芯片、eeprom、flash 等等子设备定义为 v4l2_subdev,由 v4l2_device 统一管理。media_device 将子设备连接建立 pipline,用于运行时数据流的管理,并且可以动态修改。
msm v4l2 驱动:
- video_device,v4l2_device 和 media_device 等相关结构体的初始化:msm_probe;
- stream 创建与删除:msm_create_stream,msm_delete_stream;
- session 创建与删除:msm_create_session, msm_destroy_session;
- 事件分发:msm_post_event

以上图片来自:
高通msm-V4L2-Camera驱动浅析1-初识 - 简书 (jianshu.com)
视频驱动V4L2子系统驱动架构-框架_lxllinux的博客-CSDN博客_v4l2驱动框架
V4L2架构分析_papaofdoudou的博客-CSDN博客_v4l2架构
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)