升阻比,顾名思义:飞行器飞行时在同一迎角a的升力(L)和阻力(D)的比值,同时也是升力系数(Cl)和阻力系数(Cd)的比值。升阻比与飞机迎角、飞行速度等参数有关,这个值越大表示飞行器的空气动力性能越好。
![]()
![]()
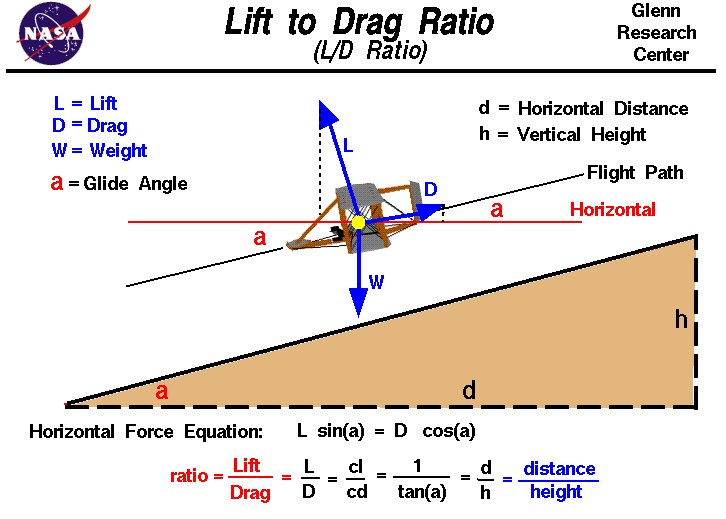
升阻比K有以上四种表示形式,当飞行器的飞行高度、构型以及飞行状态一定时,就可以计算出最大升阻比,此时飞行器的气动效率最高,对应的飞行迎角称为有利迎角。
升阻比曲线
迎角a、升力系数Cl、阻力系数Cd组成的升阻比曲线如下:
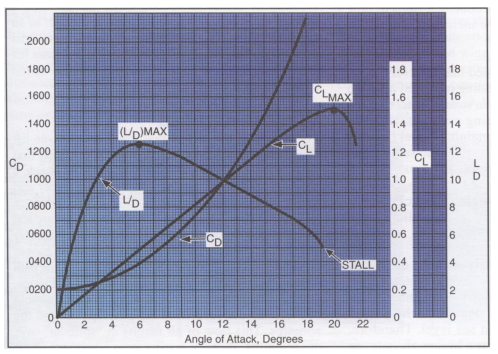
从零升迎角到有利迎角,升力增加较快,阻力增加缓慢,因此升阻比增大。从有利迎角到临界迎角,升力增加缓慢,阻力增加较快,因此升阻比较小。超过临界迎角时,压差阻力急剧增大,升阻比急剧减小。
极曲线
以Cl和Cd为坐标轴,分别在不同的迎角描点连线即可得到飞行器的极曲线。过原点作极曲线的切线,就得飞行器的最大升阻比。

参考:
百度百科
https://en.wikipedia.org/wiki/Lift-to-drag_ratio
https://wright.nasa.gov/airplane/ldrat.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)