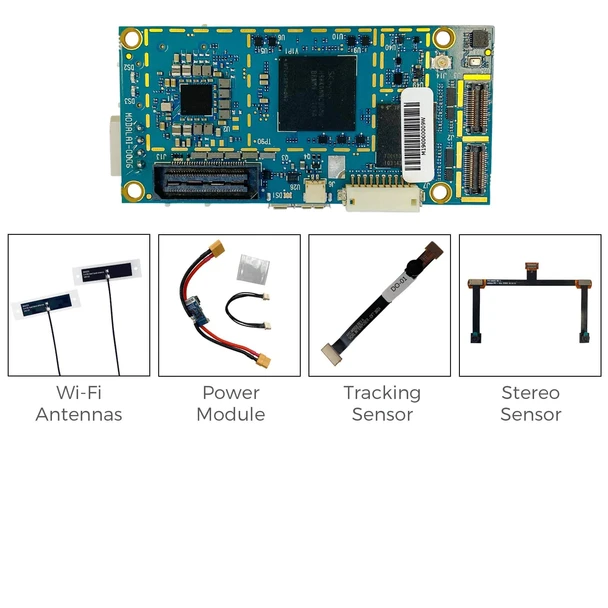
voxl flight
官方地址:https://www.modalai.com/
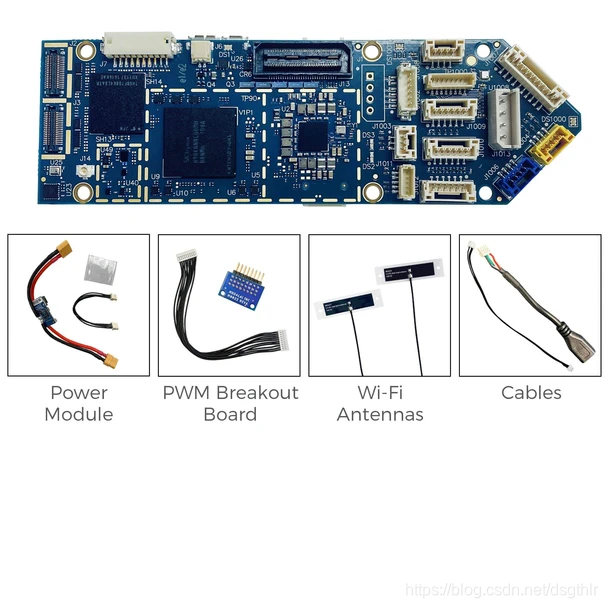
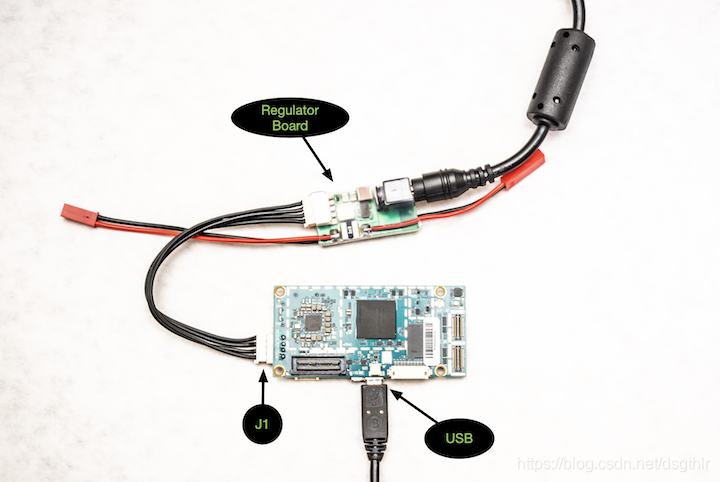
硬件及接口
两个版本。
Snapdragon 821:四核最高2.15GH,GPU,2xDSP
视频支持:3个MIPI摄像机,UVC
PCB重量18g
电源模块重量13g
相机(6克)
功率3-10W
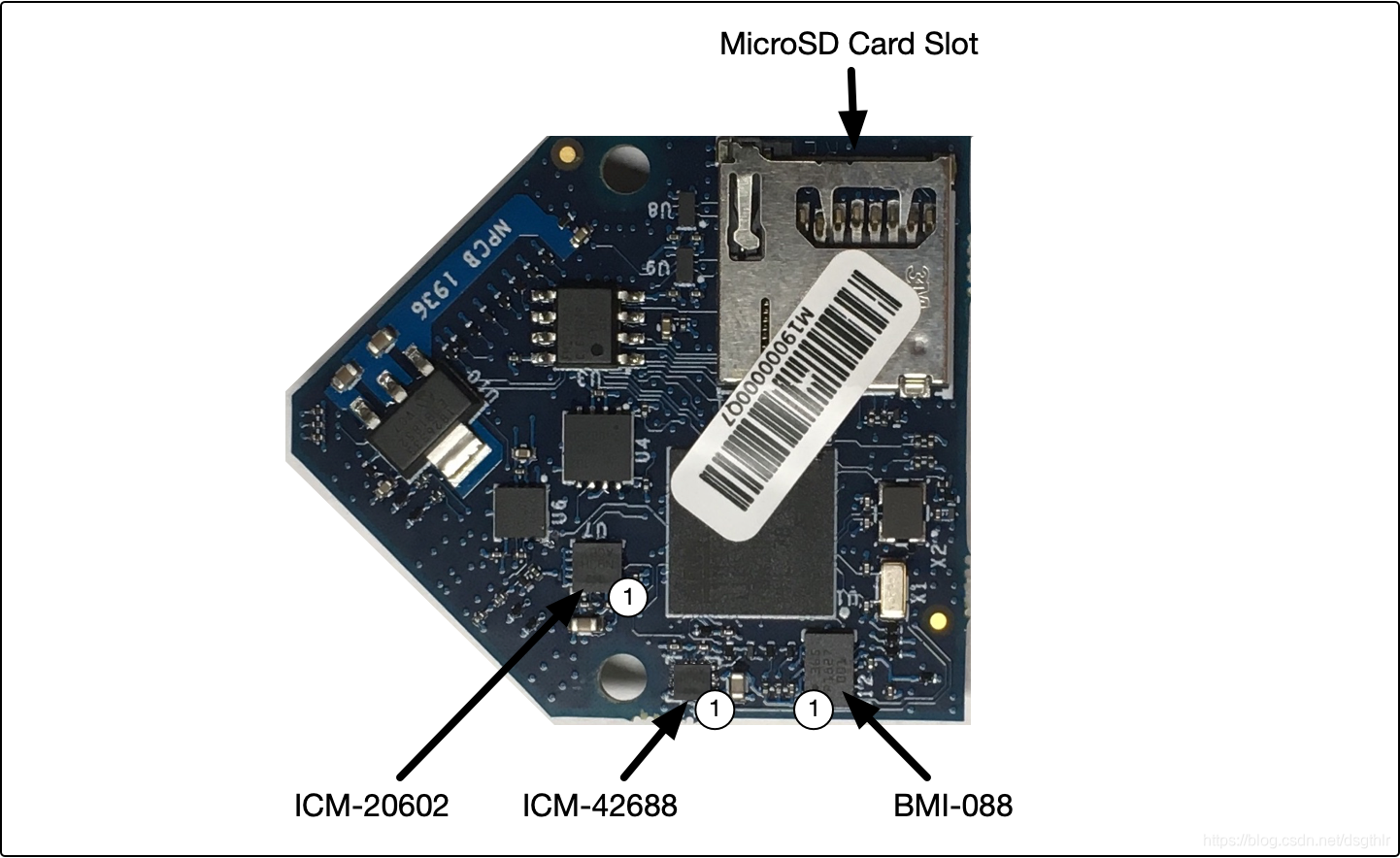
飞控板:
- MCU 216MHz, 32-bit ARM M7 STM32F765II Memory 256Kb FRAM 2Mbit Flash
512Kbit SRAM - ICM-20602 (SPI1)
- ICM-42688 (SPI2) - Coming Soon
- BMI088 (SPI6)
- Barometer BMP388 (I2C4) Secure Element A71CH (I2C4)
microSD Card Information on supported cards Inputs GPS/Mag
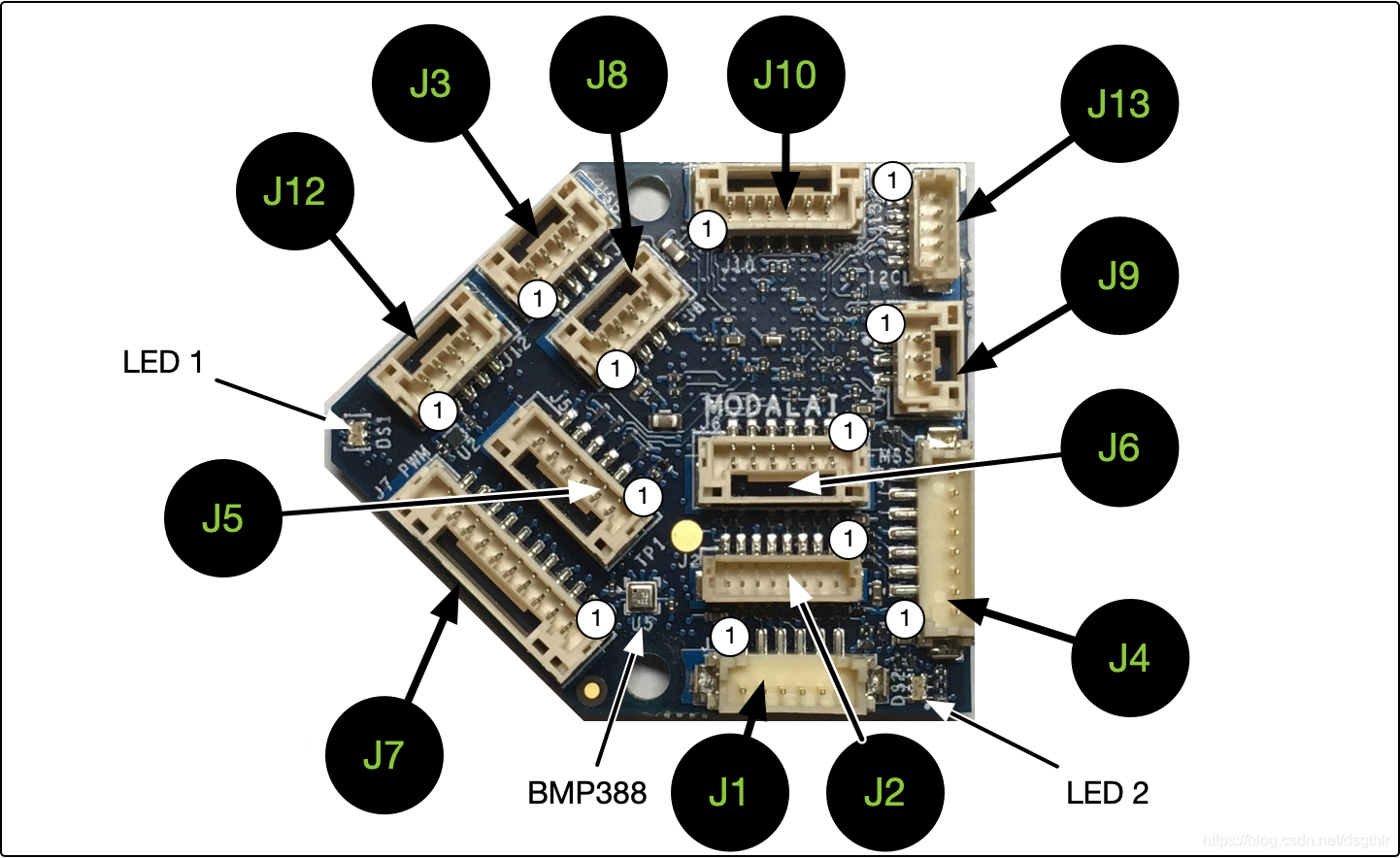
J1 VOXL Communications Interface Connector (TELEM2)
J2 Programming and Debug Connector
J3 USB Connector
J4 VOXL Spare Communications Interface Connector (TELEM3)
J5 Telemetry Connector (TELEM1)
J6 VOXL-Power Management Input / Expansion
J7 8-Channel PWM Output Connector
J8 CAN Bus Connector
J9 PPM RC In
J10 External GPS & Magnetometer Connector
J12 RC Input, Spektrum/SBus/UART Connector
J13 I2C Display (Spare Sensor Connector) / Safety Button Input
详细引脚定义
搭建开发环境
参考官方的 gitlab 来编译 https://gitlab.com/voxl-public/voxl-build/-/tree/master#install-docker
1. 安装docker
$ sudo apt-get remove docker docker-engine docker.io containerd runc
$ sudo apt-get update
$ sudo apt-get install \
apt-transport-https \
ca-certificates \
curl \
gnupg-agent \
software-properties-common
$ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
$ sudo apt-key fingerprint 0EBFCD88
$ sudo add-apt-repository \
"deb [arch=amd64] https://download.docker.com/linux/ubuntu \
$(lsb_release -cs) \
stable"
$ sudo apt-get update
$ sudo apt-get install docker-ce docker-ce-cli containerd.io
# 安装完后需要无sudo 运行
$ sudo groupadd docker
$ sudo usermod -aG docker $USER
# 测试
$ docker run hello-world
# 查看docker 信息
$ docker info
2. 下载编译代码
$ git clone https://gitlab.com/voxl-public/voxl-build.git
$ cd voxl-build
$ docker build -t voxl-build -f ubuntu-xenial.Dockerfile .
这里一般都会遇到问题,原因是docker 里面 apt update 太慢了,这时候可以通过代理来实现docker 内命令行的代码
vim ~/.docker/config.json
{
"proxies":
{
"default":
{
"httpProxy": "http://172.17.0.1:1081",
"httpsProxy": "http://172.17.0.1:1081",
"noProxy": "*.aliyun.com,.example1.com"
}
}
同样还有可能遇到docker pull 太慢,所以你得换成中国的镜像源
sudo vim /etc/docker/daemon.json
{
"registry-mirrors" : [
"http://docker.mirrors.ustc.edu.cn"
],
"insecure-registries" : [
"docker.mirrors.ustc.edu.cn"
],
"debug" : true,
"experimental" : true
}
$ sudo service docker restart
$ docker info
这样如果./docker.run -d /opt/data/workspace -i voxl-build 正常无错误的话,应该会进入docker 镜像内,然后开始编译内核
cd /opt/data/workspace
sudo chown user .
source /home/user/build.sh /opt/data/workspace
编译完成后,内核文件在
/opt/data/workspace/poky/build/tmp-glibc/deploy/images/apq8096-drone/apq8096-boot.img
/opt/data/workspace/poky/build/tmp-glibc/deploy/images/apq8096-drone/kernel_modules/qcacld-ll/wlan.ko
3. 烧写内核
连接USB
$ sudo apt install android-tools-adb
$ adb shell uname -a
$ adb reboot bootloader
$ fastboot devices
$ fastboot boot /opt/data/workspace/poky/build/tmp-glibc/deploy/images/apq8096-drone/apq8096-boot.img
4. 安装安装系统镜像
下载软件 https://developer.modalai.com/asset
cd modalai-2-2-0
sudo python flash_build_apps.py
adb shell version
- 下载安装软件bundle
# 顺序不能反,否则会安装失败
$ cd voxl-factory-bundle_0.0.3
$ ./install.sh --adb
$ cd ../voxl-software-bundle_0.0.3
$ ./install.sh --adb
- 配置wifi
adb shell voxl-wifi station <SSID> <Password>
adb reboot && adb wait-for-device
- shh 登录
ssh root@ip
- 下载px4 固件
https://github.com/PX4/Firmware/releases
modalai_fc-v1_default.px4
使用 脚本 https://github.com/PX4/Firmware/blob/master/Tools/upload.sh上传固件
这里的usb需要连接的飞控板子上J3 USB 接口
cd Firmware/Tools
./upload.sh ../modalai_fc-v1_default.px4
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)