最近使用到了OOQP求解凸优化问题,所以记录一下求解简单的二次凸优化问题。
目录
一、OOQP安装
二、OOQP相关介绍
三、例题
1.数学例题
2.代码求解
3.求解结果
总结
一、OOQP安装
参考了浙大高飞老师团队提供的 OOQP 的安装步骤,其参考链接如下:
Teach-Repeat-Replan/onboard_computer/controller/n3ctrl at experiment · HKUST-Aerial-Robotics/Teach-Repeat-Replan · GitHub
二、OOQP相关介绍
OOQP的介绍文档如下,不过是全英的,看起来可能稍微有点不爽,但是勉强可以理解。
https://pages.cs.wisc.edu/~swright/ooqp/ooqp-userguide.pdf

其中参数的介绍也有详细的说明。这里也可以参考这位博主的文章有对相关参数的详细介绍:
2021-08-31_流川_phone的博客-CSDN博客_ooqp求解器
三、不等式约束例题
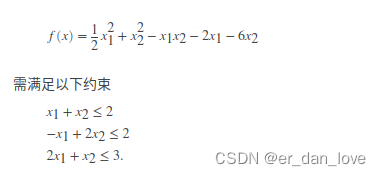
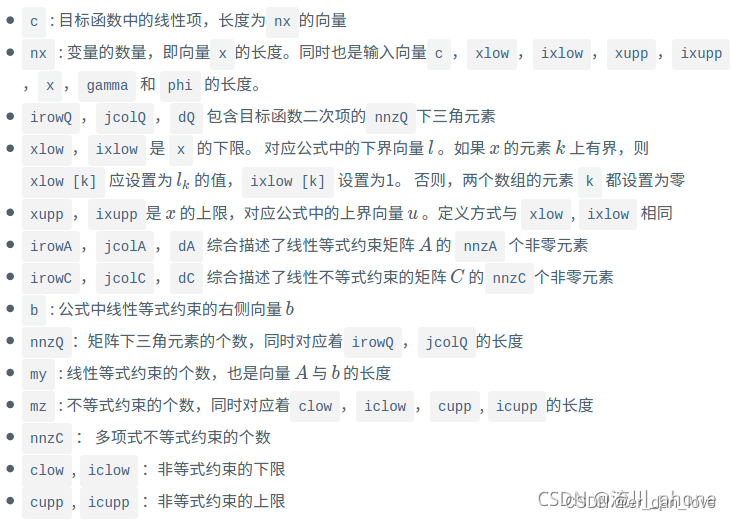
1.参数提取
从上式中可以提取出 ,
, ,
, 。x的取值范围是负无穷到正无穷。到这儿就提取出了这几个主要的矩阵参数信息。
。x的取值范围是负无穷到正无穷。到这儿就提取出了这几个主要的矩阵参数信息。
2.代码求解
代码如下:
#include "ooqp/QpGenData.h"
#include "ooqp/QpGenVars.h"
#include "ooqp/QpGenResiduals.h"
#include "ooqp/GondzioSolver.h"
#include "ooqp/QpGenSparseMa27.h"
#include <iostream>
#include <string.h>
using namespace std;
const int nx = 2;
double c[] = {-2,-6};
double xupp[] = {0,0};
char ixupp[] = {0,0};
double xlow[] = {0,0};
char ixlow[] = {0,0};
const int nnzQ = 3;
int irowQ[] = {0,1,1};
int jcolQ[] = {0,0,1};
double dQ[] = {1,-1,2};
int my = 0;//线性等式约束的个数
double *b = 0;
int nnzA = 0;
int *irowA = 0;
int *jcolA = 0;
double *dA = 0;
const int mz = 3;
double clow[] = {0,0,0};
char iclow[] = {1,1,1};
double cupp[] = {2,2,3};
char icupp[] = {1,1,1};
const int nnzC = 6;
int irowC[] = {0,0,1,1,2,2};
int jcolC[] = {0,1,0,1,0,1};
double dC[] = {1,1,-1,2,2,1};
int main(int argc,char * argv[])
{
int usage_ok = 1;
int quiet = 0;
if(argc > 2)
{
usage_ok = 0;
}
if(argc == 2)
{
if(0 == strcmp("--quiet",argv[1]))
{
quiet = 1;
}
else
{
usage_ok = 0;
}
}
if(!usage_ok)
{
cerr<<"Usage:"<<argv[0]<<"[--quiet]"<<endl;
return 1;
}
QpGenSparseMa27 * qp = new QpGenSparseMa27(nx,my,mz,nnzQ,nnzA,nnzC);
QpGenData * prob = (QpGenData *)qp -> copyDataFromSparseTriple(
c,irowQ,nnzQ,jcolQ,dQ,
xlow,ixlow,xupp,ixupp,
irowA,nnzA,jcolA,dA,b,
irowC,nnzC,jcolC,dC,
clow,iclow,cupp,icupp);
QpGenVars * vars = (QpGenVars *)qp -> makeVariables(prob);
QpGenResiduals *resid = (QpGenResiduals *)qp -> makeResiduals(prob);
GondzioSolver *s = new GondzioSolver(qp,prob);
if(!quiet)
{
s->monitorSelf();
}
int ierr = s->solve(prob,vars,resid);
if(ierr == 0)
{
cout.precision(4);
cout<<"Solution:"<<endl;
vars->x->writefToStream(cout,"x[%{index}] = %{value}");
}
else
{
cout<<"Could not solve the problem!"<<endl;
}
return ierr;
}
3.求解结果
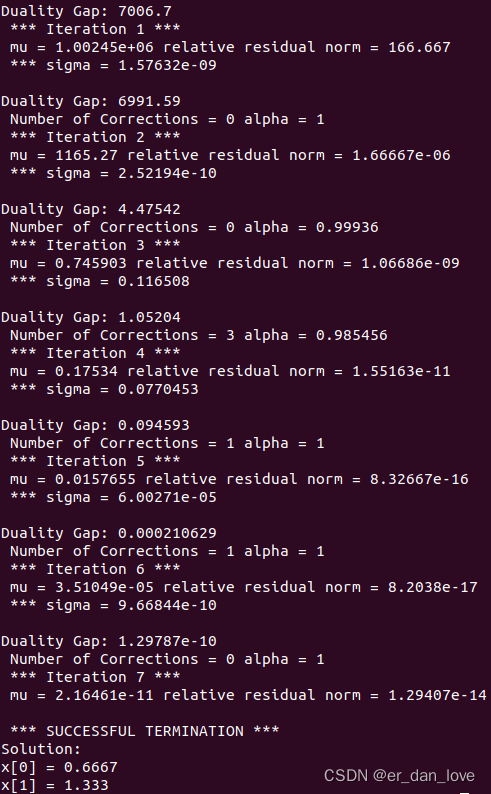
从上图中可以看出变量的取值分别为 0.6667 和 1.333。
四、等式约束例题
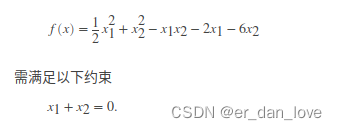
1、参数提取
最小化的目标函数同上一部分所介绍的目标函数是一样的,不同的是这个只有等式约束没有不等式约束,需要修改的是这一部分,如下图所示。
这里线性等式约束只有一个故需要修改,b 的值是等式约束右侧的值,nnzA 是等式约束左侧系数矩阵中的下三角元素个数,irowA 和 jcolA 分别为元素对应的角标都是从 0 开始的,dA 代表等式约束中系数矩阵的元素的值。其余部分和上面那部分的代码相同。
2、代码求解
#include "ooqp/QpGenData.h"
#include "ooqp/QpGenVars.h"
#include "ooqp/QpGenResiduals.h"
#include "ooqp/GondzioSolver.h"
#include "ooqp/QpGenSparseMa27.h"
#include <iostream>
#include <string.h>
using namespace std;
const int nx = 2;
double c[] = {-2,-6};
double xupp[] = {0,0};
char ixupp[] = {0,0};
double xlow[] = {0,0};
char ixlow[] = {0,0};
const int nnzQ = 3;
int irowQ[] = {0,1,1};
int jcolQ[] = {0,0,1};
double dQ[] = {1,-1,2};
int my = 1;//线性等式约束的个数
double b[] = {0};
int nnzA = 1;
int irowA[] = {0,0};
int jcolA[] = {0,1};
double dA[] = {1,1};
const int mz = 0;
double *clow = 0;
char *iclow = 0;
double *cupp = 0;
char *icupp = 0;
const int nnzC = 0;
int *irowC = 0;
int *jcolC = 0;
double *dC = 0;
int main(int argc,char * argv[])
{
int usage_ok = 1;
int quiet = 0;
if(argc > 2)
{
usage_ok = 0;
}
if(argc == 2)
{
if(0 == strcmp("--quiet",argv[1]))
{
quiet = 1;
}
else
{
usage_ok = 0;
}
}
if(!usage_ok)
{
cerr<<"Usage:"<<argv[0]<<"[--quiet]"<<endl;
return 1;
}
QpGenSparseMa27 * qp = new QpGenSparseMa27(nx,my,mz,nnzQ,nnzA,nnzC);
QpGenData * prob = (QpGenData *)qp -> copyDataFromSparseTriple(
c,irowQ,nnzQ,jcolQ,dQ,
xlow,ixlow,xupp,ixupp,
irowA,nnzA,jcolA,dA,b,
irowC,nnzC,jcolC,dC,
clow,iclow,cupp,icupp);
QpGenVars * vars = (QpGenVars *)qp -> makeVariables(prob);
QpGenResiduals *resid = (QpGenResiduals *)qp -> makeResiduals(prob);
GondzioSolver *s = new GondzioSolver(qp,prob);
if(!quiet)
{
s->monitorSelf();
}
int ierr = s->solve(prob,vars,resid);
if(ierr == 0)
{
cout.precision(4);
cout<<"Solution:"<<endl;
vars->x->writefToStream(cout,"x[%{index}] = %{value}");
}
else
{
cout<<"Could not solve the problem!"<<endl;
}
return ierr;
}
三、求解结果

从求解结果中可以得出 x1 和 x2 值分别是 0 和 3。
总结
以上就是OOQP的安装以及使用OOQP对简单的二次凸优化问题进行求解的过程。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)