uart.c
如果使用#pragma import(__use_no_semihosting),则在MDK中不勾选use Microlib。当前代码直接重定向没使用#pragma import(__use_no_semihosting),故需要选择use Microlib。
#include "usart.h"
#include <stdio.h>
#include <string.h>
#include "ad5592.h"
#include "ad5766.h"
#include "ad7699.h"
//
#define SELF_CHECK_CMD_R 0x01
#define SELF_CHECK_CMD_T 0x02
#define LASER_CMD_R 0x03
#define LASER_CMD_T 0x04
#define LASER_PARAMETER_CMD_R 0x05
#define LASER_PARAMETER_CMD_T 0x06
#define TEC_PARAMETER_CMD_R 0x07
#define TEC_PARAMETER_CMD_T 0x08
#define MODULATOR_CMD_R 0x09
#define MODULATOR_CMD_T 0x0A
#define FFT_CMD_R 0x0B
#define FFT_CMD_T 0x0C
//如果使用os,则包括下面的头文件即可.
#if SYSTEM_SUPPORT_OS
#include "includes.h" //os 使用
#endif
UART_HandleTypeDef UART1_Handler; //UART句柄
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
//#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#if 0
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->ISR&0X40)==0);//循环发送,直到发送完毕
USART1->TDR=(u8)ch;
return ch;
}
#endif
#if 1
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->ISR&0X40)==0);//循环发送,直到发送完毕
//USART1->RQR |= USART_RQR_TXFRQ;
USART1->TDR=(u8)ch;
return ch;
}
int fgetc(FILE *f)
{
while((USART1->ISR & UART_FLAG_RXNE) == RESET);
//USART1->RQR |= USART_RQR_RXFRQ;
return (int)(USART1->RDR);
}
#endif
#if EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.
//接收状态
//bit15, 接收完成标志
//bit14, 接收到0x0d
//bit13~0, 接收到的有效字节数目
u16 USART_RX_STA=0; //接收状态标记
u16 gUsartOneReceiveFlag = 0; //接收到一帧数据标志
u8 aRxBuffer[RXBUFFERSIZE]; //HAL库使用的串口接收缓冲
u8 gFrameInfo[RXBUFFERSIZE];
u16 gADC5767_ADCVal[8];
u8 FFT_Flag = 0; //FFT实时数据上报标志
extern ad5766_dev *dev;
typedef struct{
uint16_t Head;
uint8_t SourceID;
uint8_t DestinationID;
uint8_t Command;
uint8_t Data[9];
uint16_t Tail;
}FrameInfo_TypeDef;
//初始化IO 串口1
//bound:波特率
void uart_init(u32 bound)
{
//UART 初始化设置
UART1_Handler.Instance=USART1; //USART1
UART1_Handler.Init.BaudRate=bound; //波特率
UART1_Handler.Init.WordLength=UART_WORDLENGTH_8B; //字长为8位数据格式
UART1_Handler.Init.StopBits=UART_STOPBITS_1; //一个停止位
UART1_Handler.Init.Parity=UART_PARITY_NONE; //无奇偶校验位
UART1_Handler.Init.HwFlowCtl=UART_HWCONTROL_NONE; //无硬件流控
UART1_Handler.Init.Mode=UART_MODE_TX_RX; //收发模式
HAL_UART_Init(&UART1_Handler); //HAL_UART_Init()会使能UART1
//HAL_UART_Receive_IT(&UART1_Handler, (u8 *)aRxBuffer, RXBUFFERSIZE);//该函数会开启接收中断:标志位UART_IT_RXNE,并且设置接收缓冲以及接收缓冲接收最大数据量
}
//UART底层初始化,时钟使能,引脚配置,中断配置
//此函数会被HAL_UART_Init()调用
//huart:串口句柄
void HAL_UART_MspInit(UART_HandleTypeDef *huart)
{
//GPIO端口设置
GPIO_InitTypeDef GPIO_Initure;
if(huart->Instance==USART1)//如果是串口1,进行串口1 MSP初始化
{
__HAL_RCC_GPIOA_CLK_ENABLE(); //使能GPIOA时钟
__HAL_RCC_GPIOB_CLK_ENABLE(); //使能GPIOA时钟
__HAL_RCC_USART1_CLK_ENABLE(); //使能USART1时钟
#if 1
GPIO_Initure.Pin=GPIO_PIN_9; //PA9
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //高速
GPIO_Initure.Alternate=GPIO_AF7_USART1; //复用为USART1
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA9
GPIO_Initure.Pin=GPIO_PIN_10; //PA10
HAL_GPIO_Init(GPIOA,&GPIO_Initure); //初始化PA10
#endif
#if 0
GPIO_Initure.Pin=GPIO_PIN_6; //PB6
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推挽输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_FAST; //高速
GPIO_Initure.Alternate=GPIO_AF7_USART1; //复用为USART1
HAL_GPIO_Init(GPIOB,&GPIO_Initure); //初始化PB6
GPIO_Initure.Pin=GPIO_PIN_7; //PB7
HAL_GPIO_Init(GPIOB,&GPIO_Initure); //初始化PB7
#endif
#if EN_USART1_RX
HAL_NVIC_EnableIRQ(USART1_IRQn); //使能USART1中断通道
HAL_NVIC_SetPriority(USART1_IRQn,0,0); //抢占优先级3,子优先级3
#endif
}
}
//接收完成处理回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance==USART1)//如果是串口1
{
// if((USART_RX_STA&0x8000)==0)//接收未完成
// {
// if(USART_RX_STA&0x4000)//接收到了0x0d
// {
// if(aRxBuffer[0]!=0x0a)USART_RX_STA=0;//接收错误,重新开始
// else USART_RX_STA|=0x8000; //接收完成了
// }
// else //还没收到0X0D
// {
// if(aRxBuffer[0]==0x0d)USART_RX_STA|=0x4000;
// else
// {
// USART_RX_BUF[USART_RX_STA&0X3FFF]=aRxBuffer[0] ;
// USART_RX_STA++;
// if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
// }
// }
memset(gFrameInfo, 0, RXBUFFERSIZE);
memcpy(gFrameInfo, aRxBuffer, RXBUFFERSIZE);
gUsartOneReceiveFlag = 1; //接收一帧数据标志,待处理
HAL_UART_Receive_IT(&UART1_Handler,(u8 *)aRxBuffer, RXBUFFERSIZE);
//}
}
}
#if 0
//串口1中断服务程序
void USART1_IRQHandler(void)
{
u32 timeout=0;
u32 maxDelay=0x1FFFF;
#if SYSTEM_SUPPORT_OS //使用OS
OSIntEnter();
#endif
HAL_UART_IRQHandler(&UART1_Handler); //调用HAL库中断处理公用函数
timeout=0;
while (HAL_UART_GetState(&UART1_Handler)!=HAL_UART_STATE_READY)//等待就绪
{
timeout++;超时处理
if(timeout>maxDelay) break;
}
timeout=0;
while(HAL_UART_Receive_IT(&UART1_Handler,(u8 *)aRxBuffer, RXBUFFERSIZE)!=HAL_OK)//一次处理完成之后,重新开启中断并设置RxXferCount为1
{
timeout++; //超时处理
if(timeout>maxDelay) break;
}
#if SYSTEM_SUPPORT_OS //使用OS
OSIntExit();
#endif
}
#endif //end of //串口1中断服务程序
#endif// end of EN_USART1_RX
#if 1
//串口1中断服务程序
void USART1_IRQHandler(void)
{
u8 res;
#if SYSTEM_SUPPORT_OS //使用OS
OSIntEnter();
#endif
// if(__HAL_UART_GET_FLAG(&UART1_Handler, UART_FLAG_RXNE)!=RESET)
// {
// HAL_UART_Receive(&UART1_Handler, &res, 1, 1000);
// if((USART_RX_STA&0x8000)==0)//接收未完成
// {
// if(USART_RX_STA&0x4000)//接收到了0x0d
// {
// if(res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
// else USART_RX_STA|=0x8000; //接收完成了
// }
// else //还没收到0X0D
// {
// if(res==0x0d)USART_RX_STA|=0x4000;
// else
// {
// USART_RX_BUF[USART_RX_STA&0X3FFF]=res ;
// USART_RX_STA++;
// if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
// }
// }
// }
// }
HAL_UART_IRQHandler(&UART1_Handler); //调用HAL库中断处理公用函数
#if SYSTEM_SUPPORT_OS //使用OS
OSIntExit();
#endif
}
#endif
/*下面代码我们直接把中断控制逻辑写在中断服务函数内部。*/
/*
//串口1中断服务程序
void USART1_IRQHandler(void)
{
u8 Res;
#if SYSTEM_SUPPORT_OS //使用OS
OSIntEnter();
#endif
if((__HAL_UART_GET_FLAG(&UART1_Handler,UART_FLAG_RXNE)!=RESET)) //接收中断(接收到的数据必须是0x0d 0x0a结尾)
{
HAL_UART_Receive(&UART1_Handler,&Res,1,1000);
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //接收完成了
}
else //还没收到0X0D
{
if(Res==0x0d)USART_RX_STA|=0x4000;
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;
USART_RX_STA++;
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
HAL_UART_IRQHandler(&UART1_Handler);
#if SYSTEM_SUPPORT_OS //使用OS
OSIntExit();
#endif
}
#endif
*/
/**----------------------------------------------------------------------------
** @Function: FrameInfoProcess
**
** @Descriptions:
**
** @parameters:
**
**
**
** @Returned: none
**
** @Author: MCU Application Team
**
** @Date: 2017-11-16
**
-------------------------------------------------------------------------------*/
void FrameInfoProcess(void)
{
u8 RxBuffer[RXBUFFERSIZE];
FrameInfo_TypeDef* sFrameInfo = (FrameInfo_TypeDef*)RxBuffer;
// uint16_t FrameHead = 0;
// uint8_t SourceID = 0, DestinationID = 0;
memcpy(RxBuffer, gFrameInfo, RXBUFFERSIZE);
// FrameHead = RxBuffer[0] + (RxBuffer[1]<<8);
// SourceID = RxBuffer[2];
// DestinationID = RxBuffer[3];
// sFrameInfo = (FrameInfo_TypeDef*)&RxBuffer;
if(sFrameInfo->Head == 0x7E7E)
{
if((sFrameInfo->SourceID == 1)&&(sFrameInfo->DestinationID == 81))
{
switch(sFrameInfo->Command)
{
/*
#define SELF_CHECK_CMD_R 0x01
#define SELF_CHECK_CMD_T 0x02
#define LASER_CMD_R 0x03
#define LASER_CMD_T 0x04
#define LASER_PARAMETER_CMD_R 0x05
#define LASER_PARAMETER_CMD_T 0x06
#define TEC_PARAMETER_CMD_R 0x07
#define TEC_PARAMETER_CMD_T 0x08
#define MODE_CMD_R 0x09
#define MODE_CMD_T 0x0A
#define FFT_CMD_R 0x0B
#define FFT_CMD_T 0x0C
*/
case SELF_CHECK_CMD_R: //自检状态下发
{
FFT_Flag = 0;
HAL_UART_Transmit(&UART1_Handler, (uint8_t*)RxBuffer, RXBUFFERSIZE, 50);
break;
}
case SELF_CHECK_CMD_T: //自检状态上报
{
FFT_Flag = 0;
break;
}
case LASER_CMD_R: //激光器命令下发
{
FFT_Flag = 0;
break;
}
case LASER_CMD_T: //激光器命令上报
{
FFT_Flag = 0;
break;
}
case LASER_PARAMETER_CMD_R: //激光器参数下发
{
FFT_Flag = 0;
break;
}
case LASER_PARAMETER_CMD_T: //激光器参数上报
{
FFT_Flag = 0;
break;
}
case TEC_PARAMETER_CMD_R: //TEC参数下发
{
FFT_Flag = 0;
break;
}
case TEC_PARAMETER_CMD_T: //TEC参数上报
{
FFT_Flag = 0;
break;
}
case MODULATOR_CMD_R: //调制器参数下发
{
FFT_Flag = 0;
break;
}
case MODULATOR_CMD_T: //调制器参数上报
{
FFT_Flag = 0;
break;
}
case FFT_CMD_R: //FFT实时数据状态下发
{
FFT_Flag = 1;
break;
}
case FFT_CMD_T: //FFT实时数据上报
{
break;
}
default:break;
}
}
}
}
void SelfCheck(uint8_t *rData)
{
}
/*----------------------------------------------------------------------------
** Function name: LaserCMDReciveProcess
**
** Descriptions: 激光器命令下发处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void LaserCmdReciveProcess(uint8_t* rData)
{
uint8_t temp[8];
uint8_t ChannelCtl = 0;
memcpy(temp, &rData[5], 9);
ChannelCtl = temp[0]&0x0f;
if(ChannelCtl&0x0E) //LD1_ALS
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_4 , GPIO_PIN_RESET);
}
if(ChannelCtl&0x0D) //LD2_ALS
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_5 , GPIO_PIN_RESET);
}
if(ChannelCtl&0x0B) //LD3_ALS
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_6 , GPIO_PIN_RESET);
}
if(ChannelCtl&0x07) //LD4_ALS
{
HAL_GPIO_WritePin(GPIOG, GPIO_PIN_7 , GPIO_PIN_RESET);
}
}
/*----------------------------------------------------------------------------
** Function name: LaserCMDTransmitProcess
**
** Descriptions: 激光器上报命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void LaserCmdTransmitProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
FrameInfo_TypeDef *sFrameInfo = (FrameInfo_TypeDef *)&temp;
memcpy(temp, rData, RXBUFFERSIZE);
sFrameInfo->Head = 0x7e7e;
sFrameInfo->Command = 0x04;
sFrameInfo->SourceID = 0x51;
sFrameInfo->DestinationID = 0x01;
sFrameInfo->Tail = 0xFDFD;
HAL_UART_Transmit(&UART1_Handler, (uint8_t*)temp, RXBUFFERSIZE, 50);
}
/*----------------------------------------------------------------------------
** Function name: LaserParameterCmdReciveProcess
**
** Descriptions: 激光参数下发命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void LaserParameterCmdReciveProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
uint8_t ChannelCtl = 0;
uint16_t ADC_Val = 0;
memcpy(temp, &rData[5], 9); //只复制数据内容
ChannelCtl = temp[0]&0x0f;
if(ChannelCtl&0x0E) //
{
ADC_Val = (temp[2]&0x0F)*256 + temp[1];
AD5592_DAC_Set(ADDR_DAC4, ADC_Val);
}
if(ChannelCtl&0x0D) //
{
ADC_Val = (temp[3]&0x0F)*256 + temp[4];
AD5592_DAC_Set(ADDR_DAC5, ADC_Val);
}
if(ChannelCtl&0x0B) //
{
ADC_Val = (temp[5]&0x0F)*256 + temp[6];
AD5592_DAC_Set(ADDR_DAC6, ADC_Val);
}
if(ChannelCtl&0x07) //
{
ADC_Val = (temp[7]&0x0F)*256 + temp[8];
AD5592_DAC_Set(ADDR_DAC7, ADC_Val);
}
}
/*----------------------------------------------------------------------------
** Function name: LaserParameterCmdReciveProcess
**
** Descriptions: 激光参数上报命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void LaserParameterCmdTransmitProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
FrameInfo_TypeDef *sFrameInfo = (FrameInfo_TypeDef *)&temp;
memcpy(temp, rData, RXBUFFERSIZE);
sFrameInfo->Head = 0x7e7e;
sFrameInfo->Command = 0x06;
sFrameInfo->SourceID = 0x51;
sFrameInfo->DestinationID = 0x01;
sFrameInfo->Tail = 0xFDFD;
HAL_UART_Transmit(&UART1_Handler, (uint8_t*)temp, RXBUFFERSIZE, 50);
}
/*----------------------------------------------------------------------------
** Function name: TECCmdReciveProcess
**
** Descriptions: TEC下发命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-19
**
-------------------------------------------------------------------------------*/
void TECCmdReciveProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
uint8_t ChannelCtl = 0;
uint16_t ADC_Val = 0;
memcpy(temp, &rData[5], 9); //只复制数据内容
ChannelCtl = temp[0]&0x0f;
if(ChannelCtl&0x0E) //
{
ADC_Val = (temp[1]&0x0F)*256 + temp[2];
AD5592_DAC_Set(ADDR_DAC0, ADC_Val);
}
if(ChannelCtl&0x0D) //
{
ADC_Val = (temp[3]&0x0F)*256 + temp[4];
AD5592_DAC_Set(ADDR_DAC1, ADC_Val);
}
if(ChannelCtl&0x0B) //
{
ADC_Val = (temp[5]&0x0F)*256 + temp[6];
AD5592_DAC_Set(ADDR_DAC2, ADC_Val);
}
if(ChannelCtl&0x07) //
{
ADC_Val = (temp[7]&0x0F)*256 + temp[8];
AD5592_DAC_Set(ADDR_DAC3, ADC_Val);
}
}
/*----------------------------------------------------------------------------
** Function name: TECCmdTransmitProcess
**
** Descriptions: TEC上报命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void TECCmdTransmitProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
FrameInfo_TypeDef *sFrameInfo = (FrameInfo_TypeDef *)&temp;
memcpy(temp, rData, RXBUFFERSIZE);
sFrameInfo->Head = 0x7e7e;
sFrameInfo->Command = 0x08;
sFrameInfo->SourceID = 0x51;
sFrameInfo->DestinationID = 0x01;
sFrameInfo->Tail = 0xFDFD;
HAL_UART_Transmit(&UART1_Handler, (uint8_t*)temp, RXBUFFERSIZE, 50);
}
/*----------------------------------------------------------------------------
** Function name: ModulatorCmdReciveProcess
**
** Descriptions: 调制参数下发命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void ModulatorCmdReciveProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
uint8_t ChannelCtl = 0;
uint16_t ADC_Val = 0;
memcpy(temp, &rData[5], 9); //只复制数据内容
ChannelCtl = temp[0]&0x0f;
if(ChannelCtl&0x10) //第5位为高为被控工作模式
{
if(ChannelCtl&0x0E) //
{
ADC_Val = (temp[1]&0x0F)*256 + temp[2];
gADC5767_ADCVal[0] = ADC_Val;
ad5766_set_dac_reg(dev, AD5766_DAC_0, ADC_Val);
}
if(ChannelCtl&0x0D) //
{
ADC_Val = (temp[3]&0x0F)*256 + temp[4];
gADC5767_ADCVal[1] = ADC_Val;
ad5766_set_dac_reg(dev, AD5766_DAC_1, ADC_Val);
}
if(ChannelCtl&0x0B) //
{
ADC_Val = (temp[5]&0x0F)*256 + temp[6];
gADC5767_ADCVal[2] = ADC_Val;
ad5766_set_dac_reg(dev, AD5766_DAC_2, ADC_Val);
}
if(ChannelCtl&0x07) //
{
ADC_Val = (temp[7]&0x0F)*256 + temp[8];
gADC5767_ADCVal[3] = ADC_Val;
ad5766_set_dac_reg(dev, AD5766_DAC_3, ADC_Val);
}
}
else//自主模式
{
}
}
/*----------------------------------------------------------------------------
** Function name: ModulatorCmdTansmitProcess
**
** Descriptions: 调制参数上报命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void ModulatorCmdTansmitProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
uint32_t adcval = 0;
uint32_t WriteData = 0;
FrameInfo_TypeDef *sFrameInfo = (FrameInfo_TypeDef *)&temp;
memcpy(temp, &rData, RXBUFFERSIZE);
sFrameInfo->Head = 0x7e7e;
sFrameInfo->Command = 0x0C;
sFrameInfo->SourceID = 0x51;
sFrameInfo->DestinationID = 0x01;
sFrameInfo->Tail = 0xFDFD;
/*
IN0,IN2,IN4,IN6:直流数据
*/
sFrameInfo->Data[0] = 0x00;
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN0 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
sFrameInfo->Data[2] = (adcval&0x00ff);
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN2 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
sFrameInfo->Data[4] = (adcval&0x00ff);
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN4 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[5] = (adcval&0xff00) >> 8;
sFrameInfo->Data[6] = (adcval&0x00ff);
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN6 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[7] = (adcval&0xff00) >> 8;
sFrameInfo->Data[8] = (adcval&0x00ff);
HAL_UART_Transmit(&UART1_Handler, (uint8_t*)temp, RXBUFFERSIZE, 50);
/*
IN1,IN3,IN5,IN7 交流数据
*/
sFrameInfo->Data[0] = 0x00;
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN1 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
sFrameInfo->Data[2] = (adcval&0x00ff);
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN3 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
sFrameInfo->Data[4] = (adcval&0x00ff);
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN5 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[5] = (adcval&0xff00) >> 8;
sFrameInfo->Data[6] = (adcval&0x00ff);
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN7 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[7] = (adcval&0xff00) >> 8;
sFrameInfo->Data[8] = (adcval&0x00ff);
HAL_UART_Transmit(&UART1_Handler, (uint8_t*)temp, RXBUFFERSIZE, 50);
}
/*----------------------------------------------------------------------------
** Function name: FFTCmdReciveProcess
**
** Descriptions: FFT实时数据状态下发命令处理
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void FFTCmdReciveProcess(uint8_t* rData)
{
uint8_t temp[RXBUFFERSIZE];
uint32_t adcval = 0;
uint32_t WriteData = 0;
if(FFT_Flag == 0) //不实时上报FFT数据
{
return;
}
else{
// FrameInfo_TypeDef *sFrameInfo = (FrameInfo_TypeDef *)&temp;
// memcpy(temp, &rData, RXBUFFERSIZE);
// sFrameInfo->Head = 0x7e7e;
// sFrameInfo->Command = 0x0C;
// sFrameInfo->SourceID = 0x51;
// sFrameInfo->DestinationID = 0x01;
// sFrameInfo->Tail = 0xFDFD;
// /*第一通道*/
//
// //直流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN0 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[2] = (adcval&0x00ff);
// //交流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN1 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[4] = (adcval&0x00ff);
// //FFT主杂比
// //待写
// sFrameInfo->Data[7] = (gADC5767_ADCVal[0]&0xff00) >> 8;
// sFrameInfo->Data[8] = (gADC5767_ADCVal[0]&0x00ff);
//
// /*第二通道*/
//
// //直流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN2 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[2] = (adcval&0x00ff);
// //交流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN3 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[4] = (adcval&0x00ff);
// //FFT主杂比
// //待写
// sFrameInfo->Data[7] = (gADC5767_ADCVal[1]&0xff00) >> 8;
// sFrameInfo->Data[8] = (gADC5767_ADCVal[1]&0x00ff);
//
// /*第三通道*/
//
// //直流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN4 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[2] = (adcval&0x00ff);
// //交流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN5 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[4] = (adcval&0x00ff);
// //FFT主杂比
// //待写
// sFrameInfo->Data[7] = (gADC5767_ADCVal[2]&0xff00) >> 8;
// sFrameInfo->Data[8] = (gADC5767_ADCVal[2]&0x00ff);
//
// /*第四通道*/
//
// //直流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN6 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[2] = (adcval&0x00ff);
// //交流电压
// WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN7 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
// adcval = AD7699_data_write_and_read(WriteData);
// sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
// sFrameInfo->Data[4] = (adcval&0x00ff);
// //FFT主杂比
// //待写
// sFrameInfo->Data[7] = (gADC5767_ADCVal[3]&0xff00) >> 8;
// sFrameInfo->Data[8] = (gADC5767_ADCVal[3]&0x00ff);
}
}
/*----------------------------------------------------------------------------
** Function name: FFT_DataRealReport
**
** Descriptions: FFT实时数据上报
**
** parameters: rData:接收到的数据
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-11-18
**
-------------------------------------------------------------------------------*/
void FFT_DataRealReport(void)
{
uint8_t temp[RXBUFFERSIZE];
uint32_t adcval = 0;
uint32_t WriteData = 0;
if(FFT_Flag == 0) //不实时上报FFT数据
{
return;
}
else{
FrameInfo_TypeDef *sFrameInfo = (FrameInfo_TypeDef *)&temp;
sFrameInfo->Head = 0x7e7e;
sFrameInfo->Command = 0x0C;
sFrameInfo->SourceID = 0x51;
sFrameInfo->DestinationID = 0x01;
sFrameInfo->Tail = 0xFDFD;
/*第一通道*/
//直流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN0 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
sFrameInfo->Data[2] = (adcval&0x00ff);
//交流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN1 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
sFrameInfo->Data[4] = (adcval&0x00ff);
//FFT主杂比
//待写
sFrameInfo->Data[7] = (gADC5767_ADCVal[0]&0xff00) >> 8;
sFrameInfo->Data[8] = (gADC5767_ADCVal[0]&0x00ff);
/*第二通道*/
//直流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN2 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
sFrameInfo->Data[2] = (adcval&0x00ff);
//交流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN3 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
sFrameInfo->Data[4] = (adcval&0x00ff);
//FFT主杂比
//待写
sFrameInfo->Data[7] = (gADC5767_ADCVal[1]&0xff00) >> 8;
sFrameInfo->Data[8] = (gADC5767_ADCVal[1]&0x00ff);
/*第三通道*/
//直流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN4 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
sFrameInfo->Data[2] = (adcval&0x00ff);
//交流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN5 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
sFrameInfo->Data[4] = (adcval&0x00ff);
//FFT主杂比
//待写
sFrameInfo->Data[7] = (gADC5767_ADCVal[2]&0xff00) >> 8;
sFrameInfo->Data[8] = (gADC5767_ADCVal[2]&0x00ff);
/*第四通道*/
//直流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN6 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[1] = (adcval&0xff00) >> 8;
sFrameInfo->Data[2] = (adcval&0x00ff);
//交流电压
WriteData = CFG_OVERWRITE | INCC_UNIPOLAR_TO_GND | IN7 | BW_FULL | REF_IN_4V096 | SEQ_DISABLE | RB_DISABLE;
adcval = AD7699_data_write_and_read(WriteData);
sFrameInfo->Data[3] = (adcval&0xff00) >> 8;
sFrameInfo->Data[4] = (adcval&0x00ff);
//FFT主杂比
//待写
sFrameInfo->Data[7] = (gADC5767_ADCVal[3]&0xff00) >> 8;
sFrameInfo->Data[8] = (gADC5767_ADCVal[3]&0x00ff);
}
}
main.c
/**
* Copyright(C) 2017,
* ALL rights reserved.
*
* @file main.c
* @author MCU Application Team
* @version V0.1 MDK version:4.70.0.0
* @date 9-June-2015
* @brief Project for WangChangXi
*
*/
/*--------------------------Includes---------------------------------*/
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "adc.h"
#include "dac.h"
#include "timer.h"
#include "dma.h"
#include "timer.h"
#include "spi.h"
#include "ad5766.h"
#include "ad7699.h"
#include "ad5592.h"
#include "arm_math.h"
#include "arm_const_structs.h"
#include "arm_const_structs.h"
#include "FIR_user.h"
#include <stdlib.h>
#include <stdio.h>
/*--------------------------Private define---------------------------*/
#define SIN_ON 1
#define SIN_OFF
#define DELTA 0.00005f //误差值
#define FFT_LENGTH 4096 //FFT长度,默认是1024点FFT
float fft_inputbuf[FFT_LENGTH*2]; //FFT输入数组
float fft_outputbuf[FFT_LENGTH]; //FFT输出数组
arm_cfft_radix4_instance_f32 scfft;
float time;
extern u16 gUsartOneReceiveFlag; //接收到一帧数据标志
extern u8 FFT_Flag; //FFT实时数据上报标志
extern float32_t testOutput[FFT_LENGTH]; /* 滤波后的输出 */
ad5766_dev *dev;
/*--------------------------Private volitale------------------------*/
ad5766_init_param default_init_param = {
// /* SPI */
// 0, // spi_chip_select
// SPI_MODE_1, // spi_mode
// SPI_ENGINE, // spi_type
// 0, // spi_device_id
// /* GPIO */
// PS7_GPIO, // gpio_type
// GPIO_DEVICE_ID, // gpio_device_id
// GPIO_RESET, // gpio_reset
/* Device Settings */
AD5766_DISABLE, // daisy_chain_en 禁止菊花链
AD5766_ZERO, // clr 上电后保持零电平,中间电平,还是满量程。
AD5766_M_10V_TO_P_10V, // span 输出电压范围-10 ~ +10
0xfff0, // pwr_dac_setting :DAC0-DAC4输出通道开启
0xfff0, // pwr_dither_setting:DAC0-DAC4输出通道关断
0x0000000f, // dither_signal_setting:DAC0-DAC4 use N0 dither
0, // inv_dither_setting
0, // dither_scale_setting
};
u8 timeout;
extern uint16_t ADC1_ConvertData[2];
/*--------------------------Function declare-------------------------*/
void SinWave(uint8_t flag);
void DeviceInit(void);
void DSP_BasicMatchTest(void);
void SignalGenerate(void);
void FFT_Test(void);
/**----------------------------------------------------------------------------
** @Function: main
**
** @Descriptions:
**
** @parameters:
**
**
**
** @Returned: none
**
** @Author: MCU Application Team
**
** @Date: 2017-09-19
**
-------------------------------------------------------------------------------*/
int main(void)
{
u16 dacval = 0;
u16 adcval = 0;
int8_t input = 0;
uint8_t str[100];
float fVal = 0;
//char *str = "hellowankui!\r\n";
float temp;
DeviceInit();
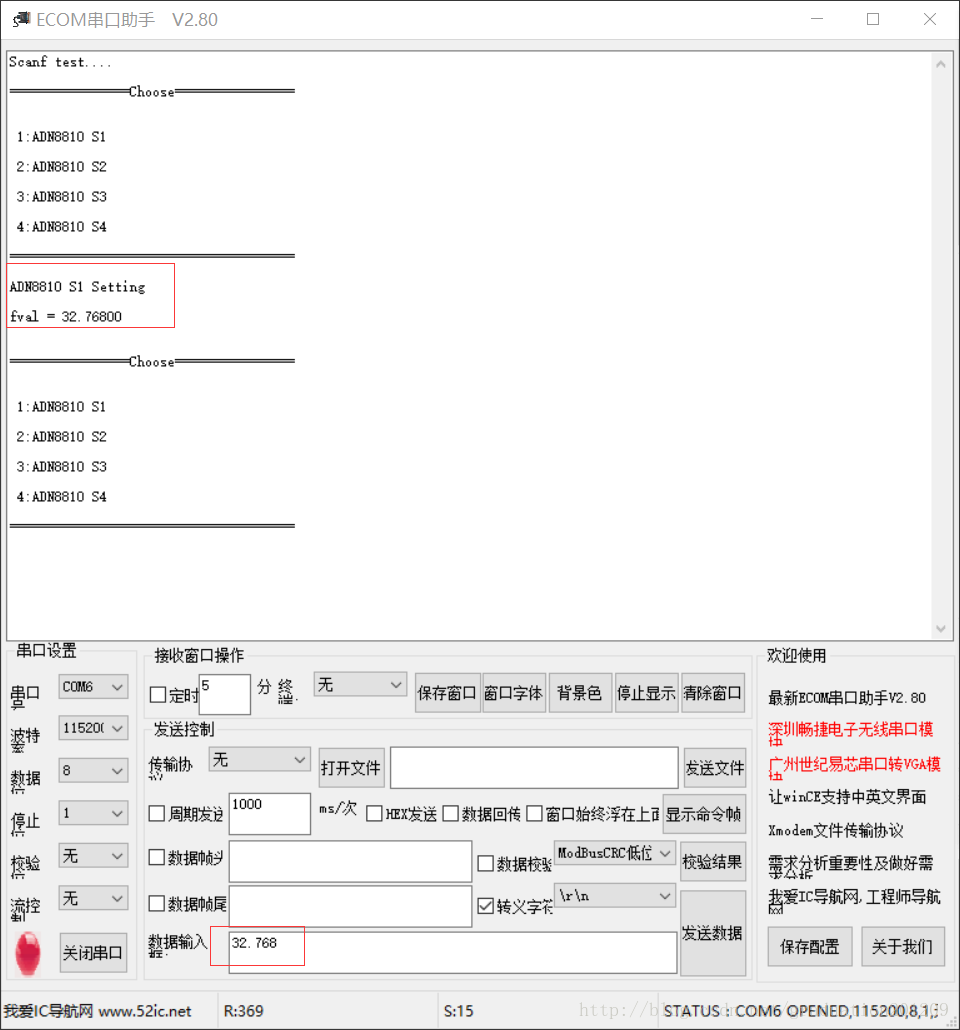
printf("Scanf test....\r\n");
// printf("\r\n================Choose================\r\n\r\n");
// printf("\r\n 1:ADN8810 S1\r\n");
// printf("\r\n 2:ADN8810 S2\r\n");
// printf("\r\n 3:ADN8810 S3\r\n");
// printf("\r\n 4:ADN8810 S4\r\n");
// printf("\r\n======================================\r\n\r\n");
//arm_cfft_radix4_init_f32(&scfft,FFT_LENGTH,0,1);//初始化scfft结构体,设定FFT相关参数
while(1)
{
;
#if 0
//SinWave(SIN_ON);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_RESET); //LED0对应引脚PB1拉低,亮,等同于LED0(0)
// HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_SET); //LED1对应引脚PB0拉高,灭,等同于LED1(1)
delay_ms(100); //延时500ms
printf("Led0 turn on, led1 turn off.\r\n");
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_1,GPIO_PIN_SET); //LED0对应引脚PB1拉高,灭,等同于LED0(1)
// HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0,GPIO_PIN_RESET); //LED1对应引脚PB0拉低,亮,等同于LED1(0)
printf("Led1 turn on, led0 turn off.\r\n");
delay_ms(100); //延时500ms
#endif
#if 0
dacval = 3103;
HAL_DAC_SetValue(&DAC1_Handler,DAC_CHANNEL_1,DAC_ALIGN_12B_R,dacval);//设置DAC值
delay_ms(10);
adcval = HAL_DAC_GetValue(&DAC1_Handler,DAC_CHANNEL_1);//读取前面设置DAC的值
temp=(float)adcval*(3.3/4096); //得到DAC电压值
printf("The DAC Output voltage is: %.3f\r\n", temp);
#endif
#if 0
adcval=Get_Adc_Average(ADC_CHANNEL_5,10); //得到ADC转换值
temp=(float)adcval*(3.3/4096); //得到DAC电压值
printf("The ADC Sample voltage is: %.3f\r\n", temp);
#endif
if(gUsartOneReceiveFlag == YES)
{
gUsartOneReceiveFlag = NO;
FrameInfoProcess();
}
// FFT_DataRealReport();
// HAL_UART_Transmit(&UART1_Handler, (uint8_t*)str, strlen(str)+1, 50);
//DSP_BasicMatchTest();
//ADC_DMA_test();
//FFT_Test();
// printf("Hello world!\r\n");
//scanf("%s", str);
//gets((char *)&str);
printf("\r\n================Choose================\r\n\r\n");
printf("\r\n 1:ADN8810 S1\r\n");
printf("\r\n 2:ADN8810 S2\r\n");
printf("\r\n 3:ADN8810 S3\r\n");
printf("\r\n 4:ADN8810 S4\r\n");
printf("\r\n======================================\r\n\r\n");
gets((char *)&input);
switch(input)
{
case'1':
{
printf("ADN8810 S1 Setting\r\n\r\n");
gets((char *)&str);
fVal = atof((char *)&str);
printf("fval = %.5f\r\n\r\n", fVal);
break;
}
case'2':
{
printf("ADN8810 S2 Setting\r\n\r\n");
gets((char *)&str);
fVal = atof((char *)&str);
printf("fval = %.5f\r\n\r\n", fVal);
break;
}
case'3':
{
printf("ADN8810 S3 Setting\r\n\r\n");
gets((char *)&str);
fVal = atof((char *)&str);
printf("fval = %.5f\r\n\r\n", fVal);
break;
}
case'4':
{
printf("ADN8810 S4 Setting\r\n\r\n");
gets((char *)&str);
fVal = atof((char *)&str);
printf("fval = %.5f\r\n\r\n", fVal);
break;
}
default:break;
}
//printf("%s\r\n", str);
//delay_ms(1000);
}
}
/*----------------------------------------------------------------------------
** Function name: SinWave
**
** Descriptions:
**
** parameters:
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-09-21
**
-------------------------------------------------------------------------------*/
void SinWave(uint8_t flag)
{
int i =0;
if(flag == SIN_ON)
{
for(; i<256; i++)
{
// DAC_SetChannel2Data(DAC_Align_12b_R, SinSheet[i]); //DAC_SetChannel2Data(DAC_Align_12b_R, gtemp);
// HAL_DAC_SetValue(&DAC1_Handler, DAC_CHANNEL_1, DAC_ALIGN_12B_R, Sin[i]);//设置DAC值
delay_ms(10);
}
}
else
{
//DAC_SetChannel2Data(DAC_Align_12b_R, 0);
}
}
void DeviceInit(void)
{
Cache_Enable(); //打开L1-Cache
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(432,25,2,9); //设置时钟,216Mhz
delay_init(216); //延时初始化
uart_init(115200); //串口初始化
LED_Init();
GPIO_Init();
// MY_ADC_Init();
//ADC_DMA_Config(DMA2_Stream0, DMA_CHANNEL_0);
// DAC1_Init();
// DAC_DMA_Config(DMA1_Stream5, DMA_CHANNEL_7);
TIM3_Init(65535,10800-1); //10Khz计数频率,最大计时6.5秒超出
// TIM2_Init(540-1, 2-1); //定时器2初始化,定时器时钟为108M,分频系数为2-1,
//所以定时器2的频率为108M/2 =54MHz,自动重装载为180-1.
//那么定时器频率为:54MHz/180 = 300KHz,去触发DAC转换。
//由于正弦波波表100个点,故300KHz/100 = 3KHz。
// TIM4_Init(90-1 , 2-1);
SPI_Init();
//FIR_Test();
//FFT_Test();
// ad5766_setup(&dev, default_init_param);
// ad5766_set_dac_reg(dev, AD5766_DAC_0|AD5766_DAC_1|AD5766_DAC_2|AD5766_DAC_3, 0xfff); //输出10V Vout={spanxD/N}+Vmin = (10-(-10)x1-10=10V
// ad5766_set_pwr_dac(dev, 0x000f); //
//HAL_DAC_SetValue(&DAC1_Handler,DAC_CHANNEL_1,DAC_ALIGN_12B_R,0);//初始值为0
}
/*使用寄存器操作实现跑马灯
int main(void)
{
Cache_Enable(); //打开L1-Cache
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(432,25,2,9); //设置时钟,216Mhz
delay_init(216); //延时初始化
uart_init(115200); //串口初始化
LED_Init();
while(1)
{
GPIOB->BSRR=GPIO_PIN_1; //LED0亮
GPIOB->BSRR=GPIO_PIN_0<<16; //LED1灭
delay_ms(500); //延时500ms
GPIOB->BSRR=GPIO_PIN_1<<16; //LED0灭
GPIOB->BSRR=GPIO_PIN_0; //LED1亮
delay_ms(500); //延时500ms
}
}
*/
//sin cos测试
//angle:起始角度
//times:运算次数
//mode:0,不使用DSP库;1,使用DSP库
//返回值:0,成功;0XFF,出错
u8 sin_cos_test(float angle,u32 times,u8 mode)
{
float sinx,cosx;
float result;
u32 i=0;
if(mode==0)
{
for(i=0;i<times;i++)
{
cosx=cosf(angle); //不使用DSP优化的sin,cos函数
sinx=sinf(angle);
result=sinx*sinx+cosx*cosx; //计算结果应该等于1
result=fabsf(result-1.0f); //对比与1的差值
if(result>DELTA)return 0XFF;//判断失败
angle+=0.001f; //角度自增
}
}else
{
for(i=0;i<times;i++)
{
cosx=arm_cos_f32(angle); //使用DSP优化的sin,cos函数
sinx=arm_sin_f32(angle);
result=sinx*sinx+cosx*cosx; //计算结果应该等于1
result=fabsf(result-1.0f); //对比与1的差值
if(result>DELTA)return 0XFF;//判断失败
angle+=0.001f; //角度自增
}
}
return 0;//任务完成
}
/*----------------------------------------------------------------------------
** Function name: DSP_BasicMatchTest
**
** Descriptions:
**
** parameters:
**
**
**
** Returned value: none
**
** Author: MCU Application Team
**
** Date:2017-09-21
**
-------------------------------------------------------------------------------*/
void DSP_BasicMatchTest(void)
{
float time;
u8 buf[50];
u8 res;
//不使用DSP优化
__HAL_TIM_SET_COUNTER(&TIM3_Handler,0);//重设TIM3定时器的计数器值
timeout=0;
res=sin_cos_test(PI/6,200000,0);
time=__HAL_TIM_GET_COUNTER(&TIM3_Handler)+(u32)timeout*65536;
if(res==0)printf("Not Use DSP test time is:%0.1fms\r\n", time/10);
else printf("Not Use DSP test ERROR!\r\n");
//使用DSP优化
__HAL_TIM_SET_COUNTER(&TIM3_Handler,0);//重设TIM3定时器的计数器值
timeout=0;
res=sin_cos_test(PI/6,200000,1);
time=__HAL_TIM_GET_COUNTER(&TIM3_Handler)+(u32)timeout*65536;
if(res==0)printf("Use DSP test time is:%0.1fms\r\n", time/10);
else printf("Use DSP test ERROR!\r\n");
LED0_Toggle;
}
void SignalGenerate(void)
{
int i;
float temp = 0;
// for(i=0; i<ADC_DMA_LEN; i++)
// {
// temp=(float)ADC1_ConvertData[i]*(3.3/4096);
// printf("The ADC1_ConvertData[%d]= %x, vol = %.3f\r\n", i, ADC1_ConvertData[i], temp);
// delay_ms(100);
// }
#if 0
SCB_DisableDCache();
for(i=0;i<FFT_LENGTH;i++)//生成信号序列
{
// fft_inputbuf[2*i]=100+
// 10*arm_sin_f32(2*PI*i/FFT_LENGTH)+
// 30*arm_sin_f32(2*PI*i*4/FFT_LENGTH)+
// 50*arm_cos_f32(2*PI*i*8/FFT_LENGTH); //生成输入信号实部
temp=(float)ADC1_ConvertData[i]*(3.3/4096.0);
printf("Temp[%d] = %.3f\r\n", i, temp);
fft_inputbuf[2*i] = temp;
//fft_inputbuf[2*i+1]= 3.3*arm_sin_f32(2*PI*i/FFT_LENGTH);
fft_inputbuf[2]=0;//虚部全部为0
}
SCB_EnableDCache();
#endif
for(i=0;i<FFT_LENGTH;i++)//生成信号序列
{
fft_inputbuf[2*i] = testOutput[i];
fft_inputbuf[2]=0;//虚部全部为0
}
}
void FFT_Test(void)
{
int i = 0;
float temp;
SignalGenerate();
__HAL_TIM_SET_COUNTER(&TIM3_Handler,0);//重设TIM3定时器的计数器值
timeout=0;
//arm_cfft_radix4_f32(&scfft,fft_inputbuf); //FFT计算(基4)
/* CFFT变换 */
arm_cfft_f32(&arm_cfft_sR_f32_len4096, fft_inputbuf, 0, 1);
time=__HAL_TIM_GET_COUNTER(&TIM3_Handler)+(u32)timeout*65536;//计算所用时间
// sprintf((char*)buf,"%0.3fms\r\n",time/1000);
// LCD_ShowString(30+12*8,160,100,16,16,buf); //显示运行时间
printf("\r\n------------------Start of FFT Test-------------------------\r\n");
arm_cmplx_mag_f32(fft_inputbuf,fft_outputbuf,FFT_LENGTH); //把运算结果复数求模得幅值
printf("\r\n%d point FFT runtime:%0.3fms\r\n",FFT_LENGTH,time/1000);
printf("FFT Result:\r\n");
printf("\r\n------------------End of FFT Test-------------------------\r\n");
for(i=0;i<FFT_LENGTH;i++)
{
printf("%.5f,",fft_outputbuf[i]);
delay_ms(2);
}
printf("\r\n------------------End of FFT Test-------------------------\r\n");
}
实验效果:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)