树莓派3 Ubuntu Meta16.04 操作系统烧录教程及系统换源
- 1 写在开头:
- 2 操作系统烧录软件下载
- 3 Ubuntu Meta 操作系统下载
- 4 操作系统烧录
- 4.1 SD 存储卡格式化
- 4.2 操作系统写入
- 4.3 换源更新
- 5 写在最后:
- 相关资源连接
——雾里看花,薪火相传。(雾薪 FogSalary)
测试时间:2022年5月2日
测试系统:Windows
测试硬件:树莓派3 、SD卡、 读卡器
目标系统:Ubuntu Meta 16.04 Raspberry Pi
1 写在开头:
本博文主要记录笔者在使用树莓派 3 结合 ROS 开发时,选择 Ubuntu Meta 16.04 作为树莓派的操作系统,记录相关的烧录过程作为个人笔记,也供读者参考。本博客主要从以下方面进行介绍
- 介绍树莓派官网及 Ubuntu Meta 操作系统的下载
- 介绍使用树莓派官方提供的镜像烧录器进行操作系统烧录(个人感觉比 Win32DiskImager 好用,并且用户界面良好)
- 介绍完成操作系统烧录后的换源操作
2 操作系统烧录软件下载
为完成树莓派镜像系统的烧录,首先进行烧录软件下载,点击访问如下网址:Click
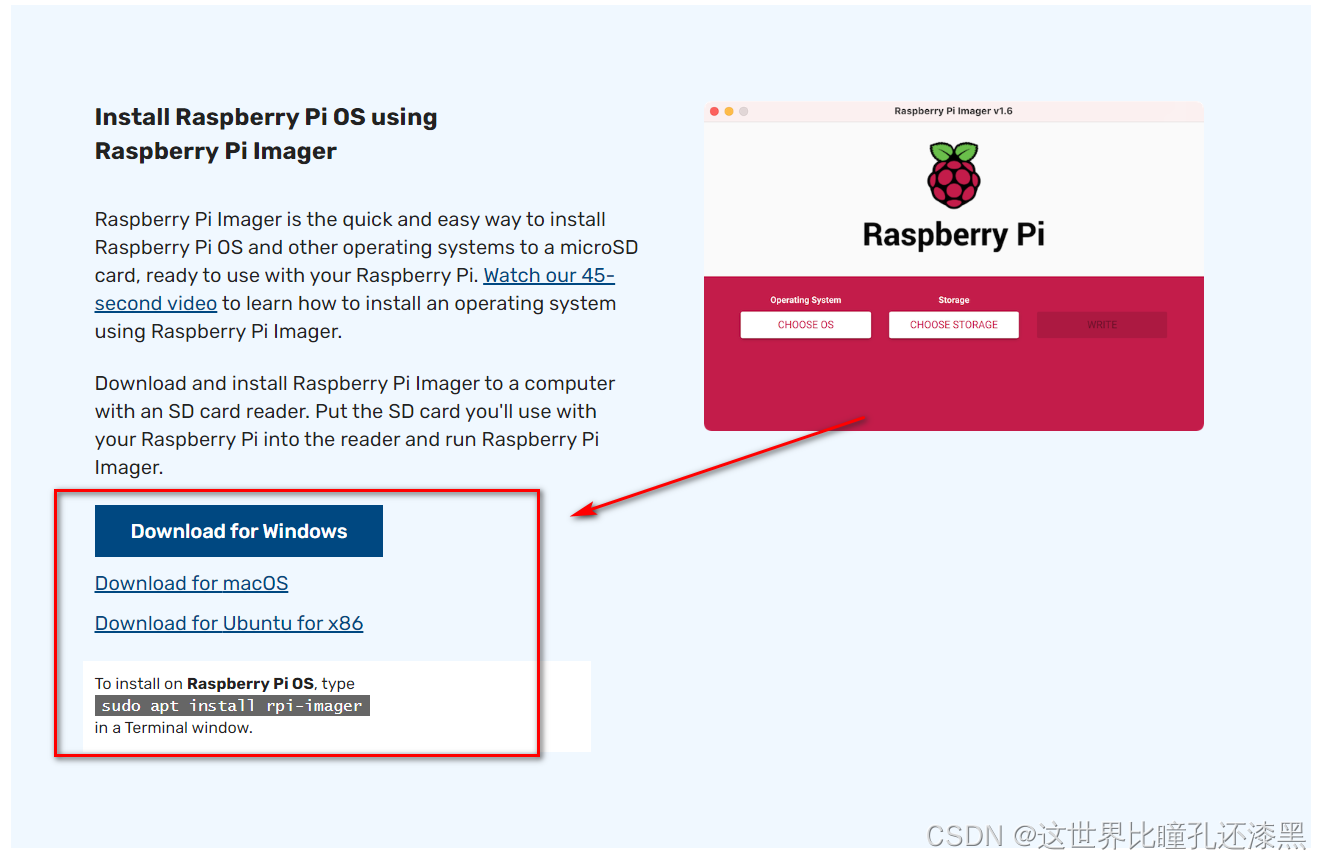
选择适合自己 PC 操作系统的版本进行下载并安装,由于安装过程简单,并且好像无法设置盘符,故不在此处赘述。
安装完成后打开如下图所示:

3 Ubuntu Meta 操作系统下载
在本文中,博主使用的是 Ubuntu Meta 16.04 版本的操作系统,但作者会给出的是操作系统的资源连接,读者可根据自己需求进行对应版本的操作系统下载。
点击访问操作系统资源列表:Click
点击访问下载 Ubuntu Meta 16.04 Raspberry Pi 操作系统:Click
资源列表如下图所示:

可以看到,页面直接就有 18.04 、20.04、21.10 等版本下载,其他版本可在 archived 目录下进行下载
此处需要注意的是,我们使用的硬件架构是树莓派,因此需要选择的是 armhf 架构的操作系统
4 操作系统烧录
完成烧录软件和对应操作系统的下载后,下一步进行操作系统的烧录
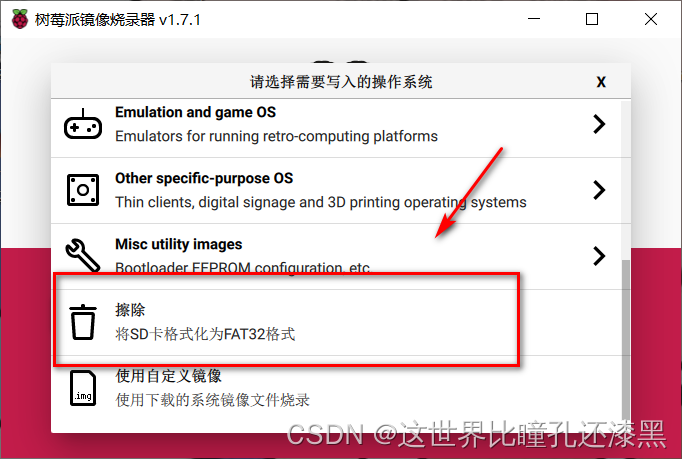
4.1 SD 存储卡格式化
打开烧录软件,并使用读卡器接入 SD 存储卡,首先使用烧录软件对 SD 卡进行格式化并转换为 FAT32 格式。
步骤如下
- 选择模式为擦除
- 选择目标SD卡
- 点击烧录进行擦除(需要注意的是,SD卡中无重要数据,否则将被格式化擦除)
- 等待擦除完成







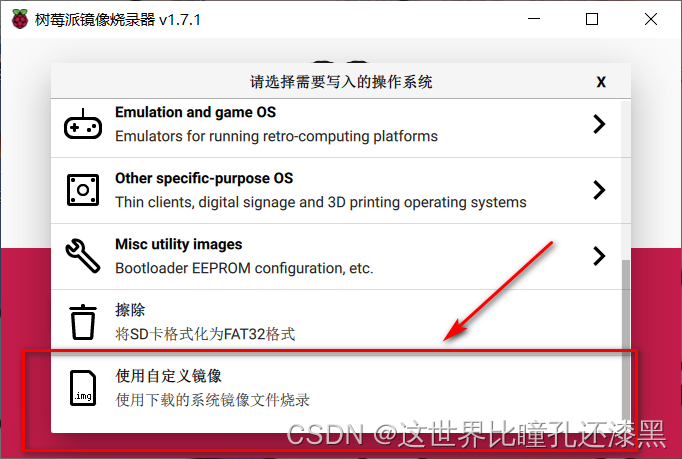
4.2 操作系统写入
完成 SD 存储卡的格式转换与擦粗后,下一步进行操作系统的写入
操作系统烧录步骤如下:
- 写入操作系统处选择自定义操作系统,并选择刚刚下载的 Ubuntu Meta 操作系统
- 选择目标 SD 存储卡
- 点击烧录按键进行系统烧录
- 等待烧录完成后弹出 SD 卡
需要注意的是,USB 接口务必选择 3.0 接口,这样烧录更快





完成上述烧录步骤后,弹出 SD 卡将其插入树莓派 SD 卡卡槽并启动树莓派,进行相关配置安装即可。
需要注意的是,给树莓派供电一定要充足,否则将无法开机。
4.3 换源更新
完成操作系统写入与安装后,我们还需要对操作系统进行换源,才能更加方便我们的使用,因为默认的系统源都是指向国外地址,我们的访问会很慢甚至异常,因此需要替换系统源为国内源方便我们使用。
首先对系统进行更新
sudo apt update
如果遇到提示无法获得锁,输入如下命令
sudo rm /var/lib/dpkg/lock
首先对系统源进行备份
sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
然后对其编辑,由于系统没有自带 gedit,此处使用系统自带的 pluma 进行编辑
sudo pluma /etc/apt/sources.list
将文件内的源更换为阿里云的源,其他例如清华大学的也可以,此处以阿里云为例,需要注意的是使用的是 ubuntu-ports
# 默认注释了源码仓库,如有需要可自行取消注释
deb https://mirrors.aliyun.com/ubuntu-ports/ xenial main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ xenial main main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ xenial-updates main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ xenial-updates main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ xenial-backports main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ xenial-backports main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ xenial-security main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ xenial-security main restricted universe multiverse
# 预发布软件源,不建议启用
# deb https://mirrors.aliyun.com/ubuntu-ports/ xenial-proposed main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ xenial-proposed main restricted universe multiverse
替换后保存退出,终端键入如下命令进行更新
sudo apt udpate
sudo apt upgrade
至此即完成了树莓派 Ubuntu Meta 16.04 操作系统的安装并完成了系统源的更新。
5 写在最后:
由于笔者水平有限,文中若存在错误之处,定是笔者认知的错误,如读者发现其中的问题,还请不吝指出,让笔者对其修订,避免让其他读者重蹈笔者之错误。此外,本博文为记录树莓派-ROS开发教程之一。
相关资源连接
树莓派(Raspberry Pi)官网
Ubuntu Meta 官网
Ubuntu Meta 系统镜像仓库
树莓派官方烧录软件
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)