参考:使用OpenCV检测图像中的矩形_知来者逆的博客-CSDN博客_opencv检测图像中的矩形
1.得到原始图像之后,代码处理的步骤是:
(1)滤波增强边缘。
(2)分离图像通道,并检测边缘。
(3) 提取轮廓。
(4)使用图像轮廓点进行多边形拟合。
(5)计算轮廓面积并得到矩形4个顶点。
(6)求轮廓边缘之间角度的最大余弦。
(7)画出矩形。
一、首先介绍几个本文用到的函数:
1、mixChannels()函数
用途:用于将输入数组的指定通道复制到输出数组的指定通道。
mixChannels()参数说明:
void mixChannels(
const Mat* src, //输入数组或向量矩阵,所有矩阵的大小和深度必须相同。
size_t nsrcs, //矩阵的数量
Mat* dst, //输出数组或矩阵向量,大小和深度必须与src[0]相同
size_t ndsts,//矩阵的数量
const int* fromTo,//指定被复制通道与要复制到的位置组成的索引对
size_t npairs //fromTo中索引对的数目
);
示例:HSV通道获取
在HSV颜色空间中:
色相 (Hue):代表色彩。取 0 到 360 度的数值来衡量(红-黄-绿-青-蓝-洋红)。
饱和度 (Saturation):又称色度,指色彩的深浅,饱和度代表灰色与色调的比例,并以 0% (灰色) 到 100% (完全饱和) 来衡量;S = 0时只有灰度。
色调 (Value):色彩的明亮程度。V=1。它包含RGB模型中的R=1,G=1,B=1 三个面,所代表的颜色较亮。
利用mixChannels()函数通过复制指定通道可以看到HSV颜色空间下的三个通道的具体情况。
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
Mat src, hsv, dst;
src = imread("1.jpg");
if (src.empty())
{
printf("can not load image \n");
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
cvtColor(src, hsv, COLOR_BGR2HSV);
dst.create(hsv.size(), hsv.depth());
//分离Hue/色相通道
int ch[] = {0, 0};
mixChannels(&hsv, 1, &dst, 1, ch, 1);
imshow("H channel", dst);
//分离Saturation/饱和度通道
int ch1[] = {1, 0};
mixChannels(&hsv, 1, &dst, 1, ch1, 1);
imshow("S channel", dst);
//分离Value/色调通道
int ch2[] = {2, 0};
mixChannels(&hsv, 1, &dst, 1, ch2, 1);
imshow("V channel", dst);
waitKey(0);
return 0;
}
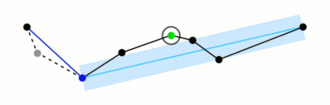
2、approxPolyDP 多边拟合函数
approxPolyDP 主要功能是把一个连续光滑曲线折线化,对图像轮廓点进行多边形拟合。
原理图:对比之前黑点连线,之后蓝色连线:
参数详解;
void approxPolyDP(
InputArray curve, //一般是由图像的轮廓点组成的点集
OutputArray approxCurve, //表示输出的多边形点集
double epsilon, //主要表示输出的精度,就是另个轮廓点之间最大距离数,5,6,7,,8,,,,,
bool closed //表示输出的多边形是否封闭
)
示例:
#include <opencv2/opencv.hpp>
#include <stdio.h>
#include <stdlib.h>
#include <iostream>
using namespace cv;
using namespace std;
Mat img = imread("F:/project/jushi/ellipse_detector-sdk/images/04_00010.bmp", -1);
//Mat img = imread("4.jpg", -1);
pyrDown(img, img, Size(img.cols / 2, img.rows / 2), 4);
imshow("img", img); imwrite("img.jpg", img);
//通过canny算法找轮廓,这样 findcontours 的结果会好些
Mat canny_out;
Canny(img, canny_out, 45, 127, 3, false);
imshow("canny_out", canny_out); imwrite("canny_out.jpg", canny_out);
//寻找轮廓
vector<vector<Point>> contours;
vector<Vec4i> hierachy;
findContours(canny_out, contours, hierachy, RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(-1, -1));
drawContours(img, contours, -1, Scalar(0, 0, 255), 1, 8, hierachy);
//定义圆形、方形、旋转矩形、椭圆的存储容器
vector<vector<Point>> contours_ploy(contours.size());
vector<Rect> rects_ploy(contours.size());
vector<Point2f> circle_centers(contours.size());
vector<float> circle_radius(contours.size());
vector<RotatedRect> RotatedRect_ploy;//注意:由于下面赋值的过程中有个点数大于5的条件,所以这里没有直接初始化,才有下面pushback的方法添加值。
vector<RotatedRect> ellipse_ploy;//注意,这里是画椭圆,但是容器类型是 RotatedRect
//将结果放到各自的容器中
for (size_t i = 0; i < contours.size(); i++)
{
approxPolyDP(contours[i], contours_ploy[i], 5, true);
rects_ploy[i] = boundingRect(contours_ploy[i]);
minEnclosingCircle(contours_ploy[i], circle_centers[i], circle_radius[i]);
if (contours_ploy[i].size() > 5)
{
RotatedRect temp1 = minAreaRect(contours_ploy[i]);
RotatedRect_ploy.push_back(temp1);
RotatedRect temp2 = fitEllipse(contours_ploy[i]);
ellipse_ploy.push_back(temp2);
}
}
//定义最终绘图的图片
Mat draw_rect(img.size(), img.type(), Scalar::all(0)),
draw_rotateRect(img.size(), img.type(), Scalar::all(0)),
draw_circle(img.size(), img.type(), Scalar::all(0)),
draw_ellipse(img.size(), img.type(), Scalar::all(0));
//绘图圆形、矩形
RNG rng(12345);
for (size_t i = 0; i < contours.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
rectangle(draw_rect, rects_ploy[i], color, 1, 8);
circle(draw_circle, circle_centers[i], circle_radius[i], color, 1, 8);
}
imshow("draw_rect", draw_rect); imwrite("draw_rect.jpg", draw_rect);
imshow("draw_circle", draw_circle); imwrite("draw_circle.jpg", draw_circle);
//绘图椭圆形、旋转矩形
Point2f pot[4];
for (size_t i = 0; i < ellipse_ploy.size(); i++)
{
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
ellipse(draw_ellipse, ellipse_ploy[i], color, 1, 8);
RotatedRect_ploy[i].points(pot);
for (int j = 0; j < 4; j++)
{
line(draw_rotateRect, pot[j], pot[(j + 1) % 4], color);
}
}
imshow("draw_ellipse", draw_ellipse); imwrite("draw_ellipse.jpg", draw_ellipse);
imshow("draw_rotateRect", draw_rotateRect); imwrite("draw_rotateRect.jpg", draw_rotateRect);
waitKey();
3、 多边形绘制polylines()
参数详解:
void cv::polylines ( Mat & img, //作为画布的矩阵
const Point *const * pts, //折线顶点数组
const int * npts, //折线顶点个数
int ncontours, //待绘制折线数
bool isClosed, //是否是闭合折线(多边形)
const Scalar & color, //折线的颜色
int thickness = 1, //折线粗细
int lineType = LINE_8, //线段类型
int shift = 0 //缩放比例(0是不缩放,4是1/4)
)
二、矩形检测实现源码
本文矩形检测代码来自于(我爱计算机公众号):https://mp.weixin.qq.com/s/WV78mvRn-cYm11cL4l2ScA
分享的开源代码地址:https://github.com/alyssaq/opencv
其算法流程:
1.中值滤波去噪;
2.依次提取不同的颜色通道(BGR)检测矩形;
3.对每一通道使用canny检测边缘或者使用多个阈值二值化;
4.使用findContours函数查找轮廓;
5.使用approxPolyDP函数去除多边形轮廓一些小的波折;
6.找到同时满足面积较大和形状为凸的四边形;
7.判断轮廓中两两邻接直线夹角余弦是否小于0.3(意味着角度在90度附近),是则此四边形为找到的矩形。
该代码效果还是不错的!
依赖于OpenCV,代码和本文的原版代码基本一致,原版可能更通用:
// The "Square Detector" program.
// It loads several images sequentially and tries to find squares in
// each image
//“矩形检测”程序。
//它按顺序加载了几张图像,并试图找到正方形
#include "opencv2/core/core.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <iostream>
#include <math.h>
#include <string.h>
using namespace cv;
using namespace std;
int thresh = 50, N = 5;
const char* wndname = "Square Detection Demo";
// helper function:
// finds a cosine of angle between vectors
// from pt0->pt1 and from pt0->pt2
//辅助功能:
//求出向量夹角的余弦
//从pt0->pt1到pt0->pt2
static double angle(Point pt1, Point pt2, Point pt0)
{
double dx1 = pt1.x - pt0.x;
double dy1 = pt1.y - pt0.y;
double dx2 = pt2.x - pt0.x;
double dy2 = pt2.y - pt0.y;
return (dx1*dx2 + dy1 * dy2) / sqrt((dx1*dx1 + dy1 * dy1)*(dx2*dx2 + dy2 * dy2) + 1e-10);
}
// returns sequence of squares detected on the image.
// the sequence is stored in the specified memory storage
//返回在图像上检测到的正方形序列。
//序列存储在指定的内存中
static void findSquares(const Mat& image, vector<vector<Point> >& squares)
{
squares.clear();
//Mat pyr, timg, gray0(image.size(), CV_8U), gray;
//down-scale and upscale the image to filter out the noise
//按比例放大图像,滤除噪声
//pyrDown(image, pyr, Size(image.cols/2, image.rows/2));
//pyrUp(pyr, timg, image.size());
// blur will enhance edge detection
//中值滤波将增强边缘检测
Mat timg(image);
medianBlur(image, timg, 9);
Mat gray0(timg.size(), CV_8U), gray;
vector<vector<Point> > contours;
// find squares in every color plane of the image
//在图像的每个颜色平面上找到正方形
for (int c = 0; c < 3; c++)
{
int ch[] = { c, 0 };
mixChannels(&timg, 1, &gray0, 1, ch, 1);//将输入数组的指定通道复制到输出数组的指定通道
// try several threshold levels
//尝试几个阈值级别
for (int l = 0; l < N; l++)
{
// hack: use Canny instead of zero threshold level.
// Canny helps to catch squares with gradient shading
// Canny帮助捕捉带有渐变阴影的正方形
if (l == 0)
{
// apply Canny. Take the upper threshold from slider
// and set the lower to 0 (which forces edges merging)
Canny(gray0, gray, 5, thresh, 5);
// dilate canny output to remove potential
// holes between edge segments
dilate(gray, gray, Mat(), Point(-1, -1));
}
else
{
// apply threshold if l!=0:
// tgray(x,y) = gray(x,y) < (l+1)*255/N ? 255 : 0
gray = gray0 >= (l + 1) * 255 / N;
}
// find contours and store them all as a list
findContours(gray, contours, RETR_LIST, CHAIN_APPROX_SIMPLE);
vector<Point> approx;
// test each contour
for (size_t i = 0; i < contours.size(); i++)
{
// approximate contour with accuracy proportional
// to the contour perimeter
//近似轮廓与精度成正比
//到轮廓周长
approxPolyDP(Mat(contours[i]), approx, arcLength(Mat(contours[i]), true)*0.02, true);
// square contours should have 4 vertices after approximation
// relatively large area (to filter out noisy contours)
// and be convex.
// Note: absolute value of an area is used because
// area may be positive or negative - in accordance with the
// contour orientation
if (approx.size() == 4 &&
fabs(contourArea(Mat(approx))) > 1000 &&
isContourConvex(Mat(approx))) //凸性检测 检测一个曲线是不是凸的
{
double maxCosine = 0;
for (int j = 2; j < 5; j++)
{
// find the maximum cosine of the angle between joint edges
double cosine = fabs(angle(approx[j % 4], approx[j - 2], approx[j - 1]));
maxCosine = MAX(maxCosine, cosine);
}
// if cosines of all angles are small
// (all angles are ~90 degree) then write quandrange
// vertices to resultant sequence
if (maxCosine < 0.3)
squares.push_back(approx);
}
}
}
}
}
// the function draws all the squares in the image
static void drawSquares(Mat& image, const vector<vector<Point> >& squares)
{
for (size_t i = 0; i < squares.size(); i++)
{
const Point* p = &squares[i][0];
int n = (int)squares[i].size();
//dont detect the border
if (p->x > 3 && p->y > 3)
polylines(image, &p, &n, 1, true, Scalar(0, 0, 255), 3, LINE_AA);
}
imshow(wndname, image);
}
int main(int /*argc*/, char** /*argv*/)
{
static const char* names[] = { "./image/2stickies.jpg", "./image/manyStickies.jpg",0 };
help();
namedWindow(wndname, 1);
vector<vector<Point> > squares;
for (int i = 0; names[i] != 0; i++)
{
Mat image = imread(names[i], 1);
if (image.empty())
{
cout << "Couldn't load " << names[i] << endl;
continue;
}
findSquares(image, squares);
drawSquares(image, squares);
imwrite( "out.jpg", image );
int c = waitKey();
if ((char)c == 27)
break;
}
return 0;
}
原版矩形检测
1.OpenCV没有内置的矩形检测的函数,如果想检测矩形,要自己去实现。
2.我这里使用的OpenCV版本是3.30.
矩形检测
1.得到原始图像之后,代码处理的步骤是:
(1)滤波增强边缘。
(2)分离图像通道,并检测边缘。
(3) 提取轮廓。
(4)使用图像轮廓点进行多边形拟合。
(5)计算轮廓面积并得到矩形4个顶点。
(6)求轮廓边缘之间角度的最大余弦。
(7)画出矩形。
2.代码
//检测矩形
//第一个参数是传入的原始图像,第二是输出的图像。
static double angle(Point pt1, Point pt2, Point pt0)
{
double dx1 = pt1.x - pt0.x;
double dy1 = pt1.y - pt0.y;
double dx2 = pt2.x - pt0.x;
double dy2 = pt2.y - pt0.y;
return (dx1*dx2 + dy1 * dy2) / sqrt((dx1*dx1 + dy1 * dy1)*(dx2*dx2 + dy2 * dy2) + 1e-10);
}
int main(int argc, char** argv)
{
//检测矩形
//第一个参数是传入的原始图像,第二是输出的图像。
/*void findSquares(const Mat& image, Mat &out)
{*/
Mat image = imread("F:/project/jushi/ellipse_detector-sdk/images/04_00010.bmp", IMREAD_COLOR);
int thresh = 50, N = 5;
vector<vector<Point> > squares;
squares.clear();
Mat src, dst, gray_one, gray,out;
src = image.clone();
out = image.clone();
gray_one = Mat(src.size(), CV_8U);
//滤波增强边缘检测
medianBlur(src, dst, 9);
//bilateralFilter(src, dst, 25, 25 * 2, 35);
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
//在图像的每个颜色通道中查找矩形
for (int c = 0; c < image.channels(); c++)
{
int ch[] = { c, 0 };
//通道分离
mixChannels(&dst, 1, &gray_one, 1, ch, 1);
// 尝试几个阈值
for (int l = 0; l < N; l++)
{
// 用canny()提取边缘
if (l == 0)
{
//检测边缘
Canny(gray_one, gray, 5, thresh, 5);
//膨脹
dilate(gray, gray, Mat(), Point(-1, -1));
imshow("dilate", gray);
}
else
{
gray = gray_one >= (l + 1) * 255 / N;
}
// 轮廓查找
//findContours(gray, contours, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
findContours(gray, contours, hierarchy, RETR_CCOMP, CHAIN_APPROX_SIMPLE);
vector<Point> approx;
// 检测所找到的轮廓
for (size_t i = 0; i < contours.size(); i++)
{
//使用图像轮廓点进行多边形拟合
approxPolyDP(Mat(contours[i]), approx, arcLength(Mat(contours[i]), true)*0.02, true);
//计算轮廓面积后,得到矩形4个顶点
if (approx.size() == 4 && fabs(contourArea(Mat(approx))) > 1000 && isContourConvex(Mat(approx)))
{
double maxCosine = 0;
for (int j = 2; j < 5; j++)
{
// 求轮廓边缘之间角度的最大余弦
double cosine = fabs(angle(approx[j % 4], approx[j - 2], approx[j - 1]));
maxCosine = MAX(maxCosine, cosine);
}
if (maxCosine < 0.3)
{
squares.push_back(approx);
}
}
}
}
}
for (size_t i = 0; i < squares.size(); i++)
{
const Point* p = &squares[i][0];
int n = (int)squares[i].size();
if (p->x > 3 && p->y > 3)
{
polylines(out, &p, &n, 1, true, Scalar(0, 255, 0), 3, LINE_AA);
}
}
imshow("dst", out);
waitKey(0);
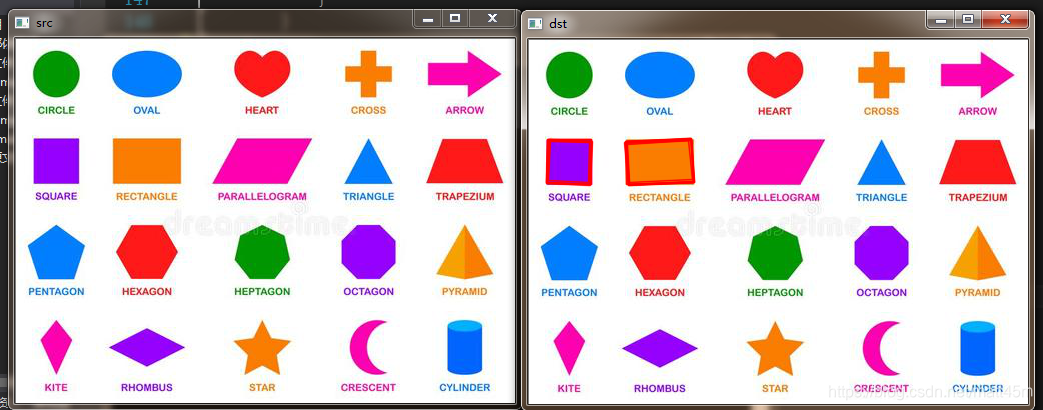
3.运行结果

————————————————
版权声明:本文为CSDN博主「知来者逆」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/matt45m/article/details/95753563
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)