本例激光雷达: HLS-LFCD2

参考资料:
https://blog.csdn.net/jacka654321/article/details/82916688
接线
新款 CP2102模块 USB to TTL USB转串口模块UART
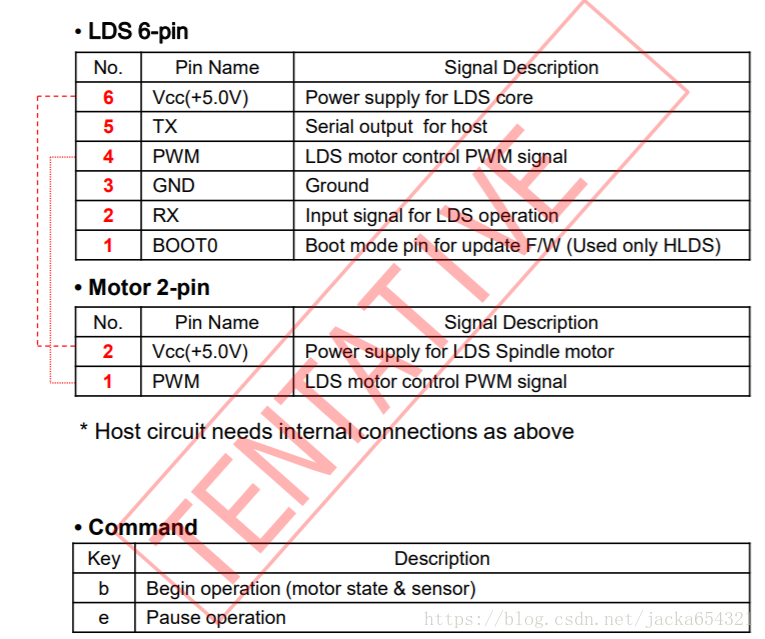
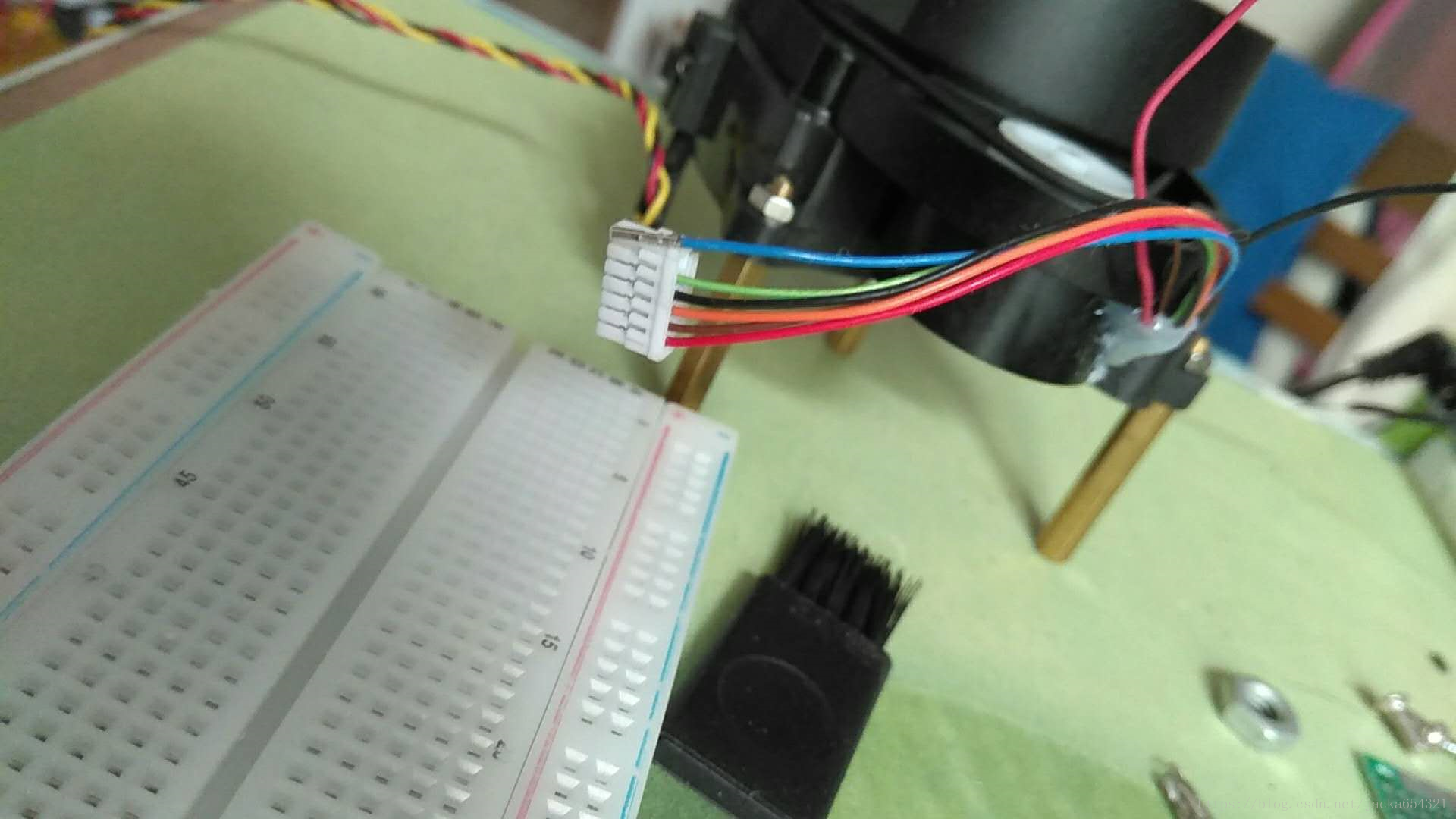
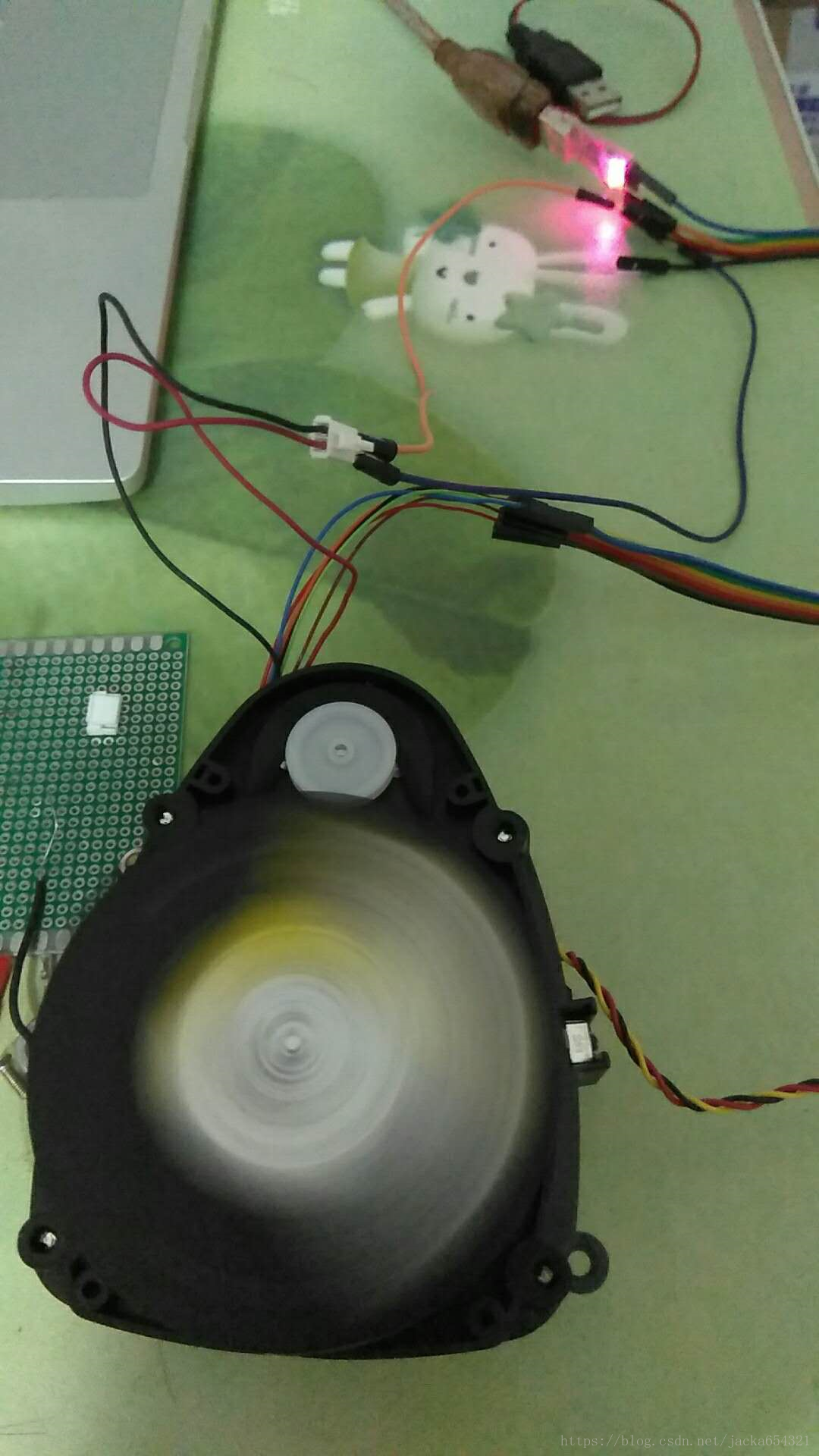
按照激光雷达pin脚描述图;从1-6把把6pin接头的线顺序接到并排杜邦线上,
6pin CP2102模块
6 Vcc 5V
5 TX RX
4 PWM
3 GND GND
2 RX TX
1 BOOT0 不接
2pin 6pin
2红Vcc 6 Vcc
1黑PWM 4 PWM
容器内:
用户指南(适用于ROS)
hls_lfcd_lds_driver包为HLS(Hitachi-LG传感器)LFCD LDS(激光距离传感器)提供驱动程序。
安装
sudo apt-get install ros-kinetic-hls-lfcd-lds-driver
设置LDS-01的权限
sudo chmod a+rw /dev/ttyUSB0
运行hlds_laser_publisher节点
$ roslaunch hls_lfcd_lds_driver hlds_laser.launch
使用RViz运行hlds_laser_publisher节点
$ roslaunch hls_lfcd_lds_driver view_hlds_laser.launch
宿主机:
用户指南(针对驱动程序)
除了ROS之外,LDS-01还支持Windows,Linux和MacOS开发环境以实现一般用途。
软件要求是:
GCC(适用于Linux和macOS),MinGW(适用于Windows)
Boost库(升级系统的Lib,在v1.66.0上测试)
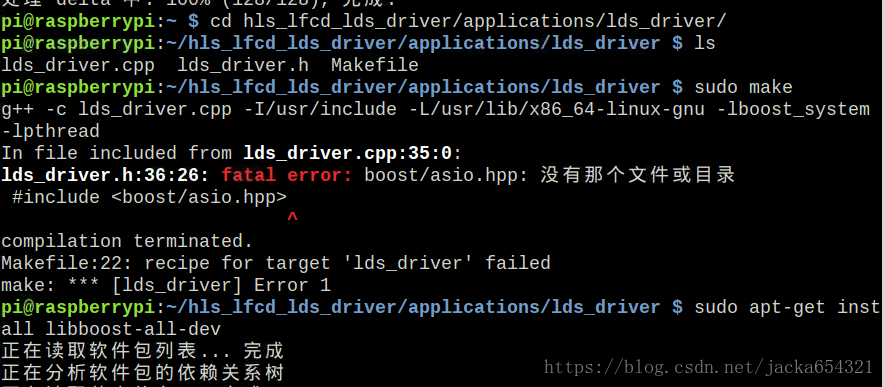
如果没有Boost库,sudo make会报错,需要先安装:
sudo apt-get install libboost-all-dev
下载
下载LDS-01的驱动程序
git clone https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git
或者您可以直接在github存储库的Web浏览器下载:
https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver
建立
这里使用的makefile是为Linux设置的。Windows和macOS应根据其开发环境进行更改。
cd hls_lfcd_lds_driver/applications/lds_driver/
make
跑
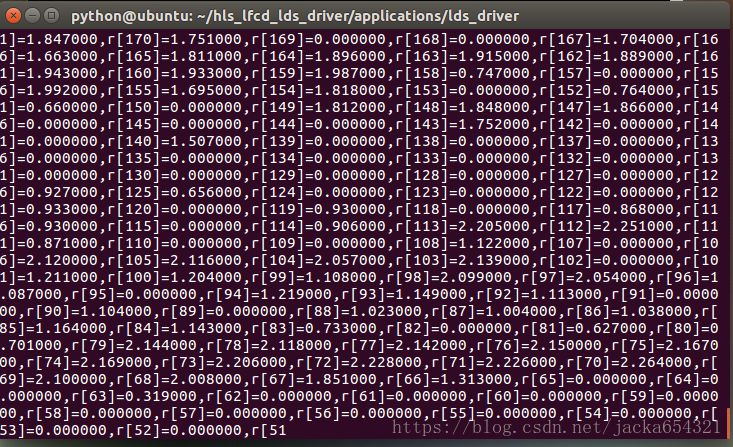
运行LDS-01驱动程序时,可以在终端中看到原始数据。请查看源代码以获取详细信息。
虚拟机Ubuntu16.04
/home/python/hls_lfcd_lds_driver/applications/lds_driver
./lds_driver
r[359]=0.438000,r[358]=0.385000,r[357]=0.379000,...
用户指南(适用于GUI)
我们提供了一个基本的GUI工具,用于可视化检查LDS-01的数据。
它支持Linux,Windows和macOS。
软件要求是:
Qt Creator和Libs(在Qt Creator v4.5.0和Qt Libs v5.10.0上测试过)
GCC(适用于Linux和macOS),MinGW(适用于Windows),可以在安装Qt时一起安装。
Boost库(升级系统的Lib,在v1.66.0上测试)
Debian搭建Qt 5开发环境
https://blog.csdn.net/demorngel/article/details/78570733
在安装前首先需要保证已经搭好了基本的开发环境,如果没有的话,请在终端下执行:
sudo apt-get install gcc g++ build-essential make automake autogen autoconf
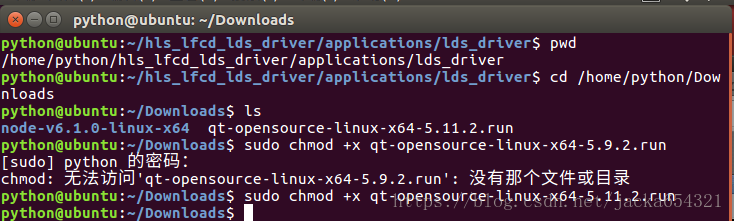
然后前往Qt官网下载Qt安装包(请选择你需要的版本,比如在此处我选择了最新的5.11.2linux版),下载完成以后在终端下执行下面两条命令;
sudo chmod +x qt-opensource-linux-x64-5.11.2.run
./qt-opensource-linux-x64-5.11.2.run
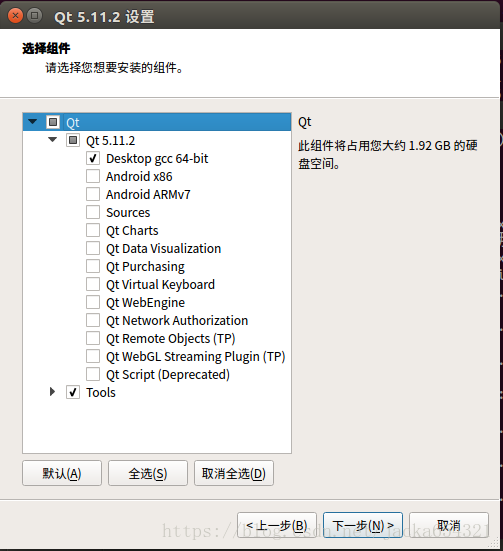
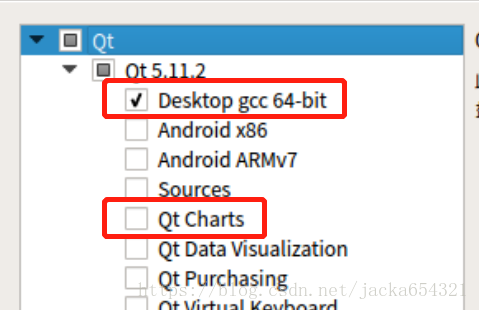
安装过程中需要选择安装目录,在这里我选择了/home/python/Qt5.11.2这个目录。另外,安装过程中需要注意的一点是在可选组件中必须勾选上GCC套件;如果不这样做的话就需要在安装完成后手动配置开发编译环境了。安装完成后,如果需要OpenGL库支持,就执行下面这条命令;
sudo apt-get install mesa-common-dev
本例测试激光雷达,还需要勾选Qt Charts,不然后面运行会报错;
下载
下载LDS-01的驱动程序和GUI源代码。
git clone https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver.git
- 或者您可以直接在github存储库的Web浏览器下载:
- https://github.com/ROBOTIS-GIT/hls_lfcd_lds_driver
- 开发环境安装相关的软件和库
- Qt - Open Source Version
- GCC (for Linux and macOS), MinGW (for Windows)
- Boost library
建立
运行Qt Creator
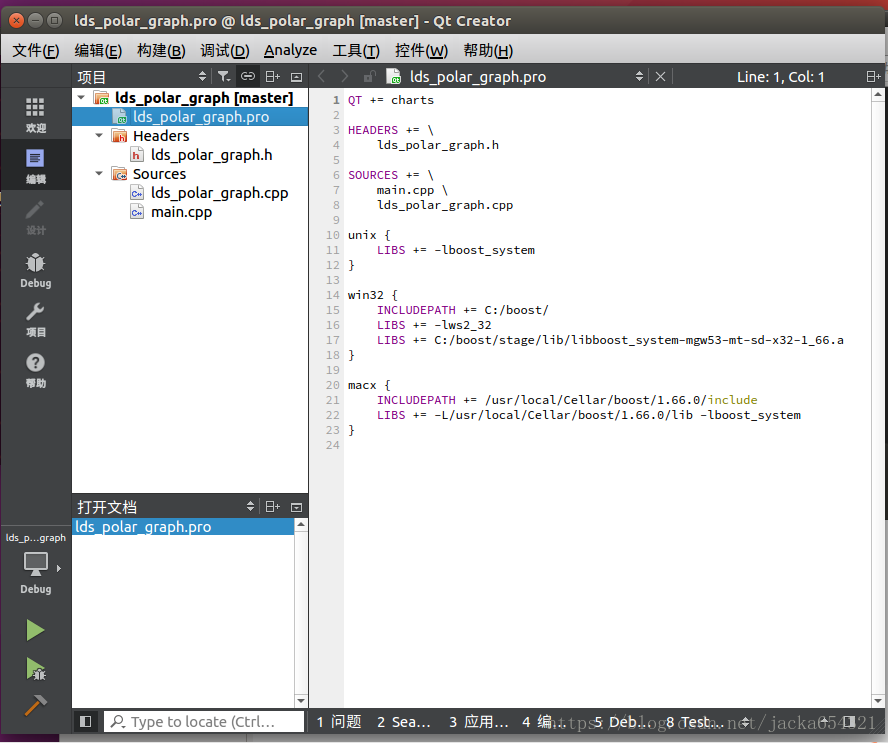
打开文件(Ctrl- O)lds_polar_graph.pro文件(hls_lfcd_lds_driver / applications / lds_polar_graph / lds_polar_graph.pro)
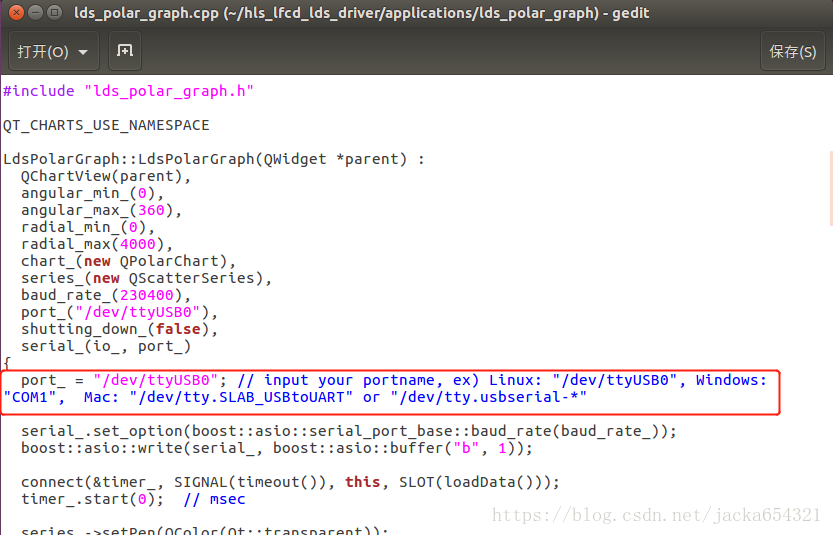
更改输入源代码的端口名称,本例激光雷达为HLS-LFCD LDS,不需要修改;
/dev/ttyUSB0
其他型号的激光雷达如Neato XV-11则改为:
/dev/neatolaser
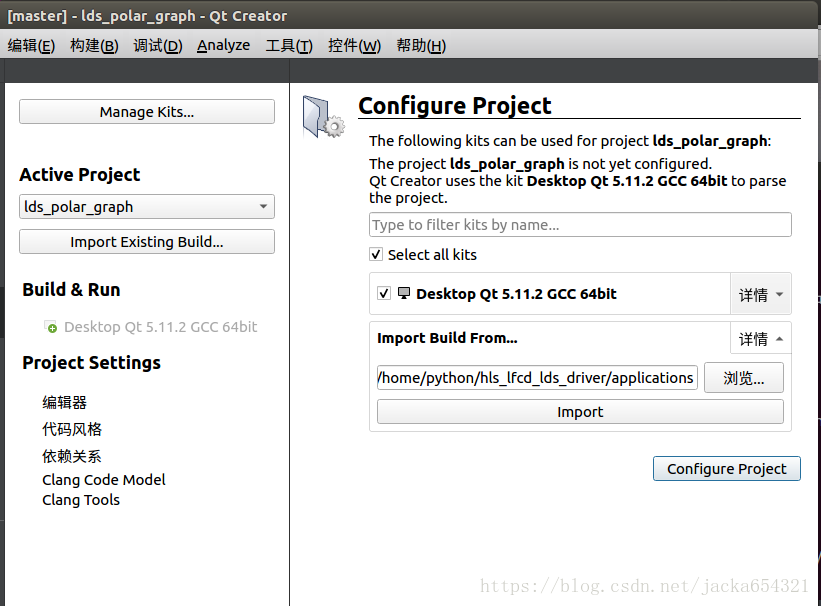
点击 
出现报错,缺失组件;
Project ER组件ROR:Unknown module(s) in QT: charts解决办法:
Qt 维护工具MaintenanceTool.exe 使用
https://blog.csdn.net/liulihuo_gyh/article/details/78583884
进入MaintenanceTool目录:
cd /home/python/Qt5.11.2
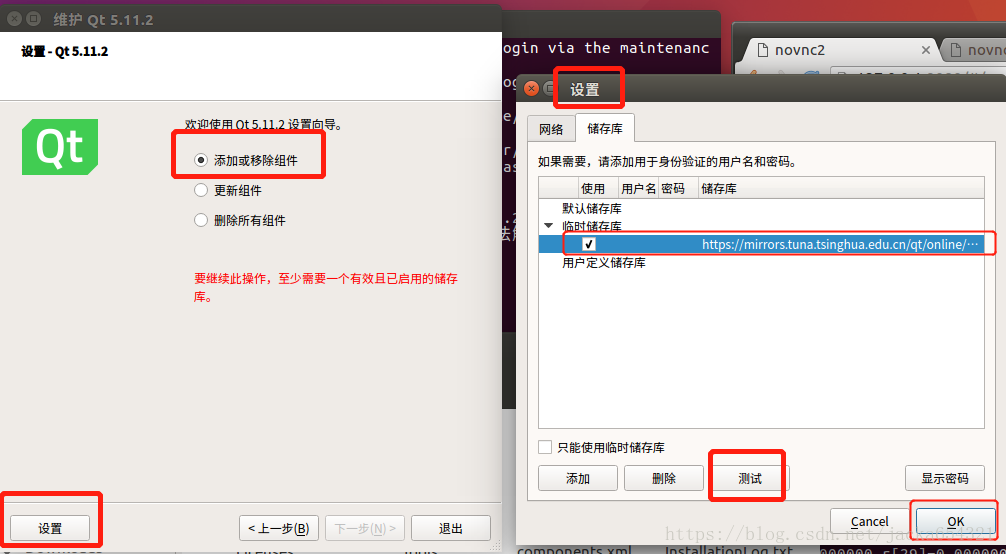
./MaintenanceTool
根据自己的系统环境,选择QT在线安装镜像的地址;
https://mirrors.tuna.tsinghua.edu.cn/qt/online/qtsdkrepository/linux_x64/root/qt/
如果还不行,选 删除所有组件,重新安装;
./MaintenanceTool
Qt5.11.2选上 gcc 和QT charts,其他保持默认,完成安装即可;
安装后,直接运行QT没有报错;
全部构建(Ctrl- Shift- B)
跑
运行应用程序(Ctrl- R)
报错:open: 权限不够

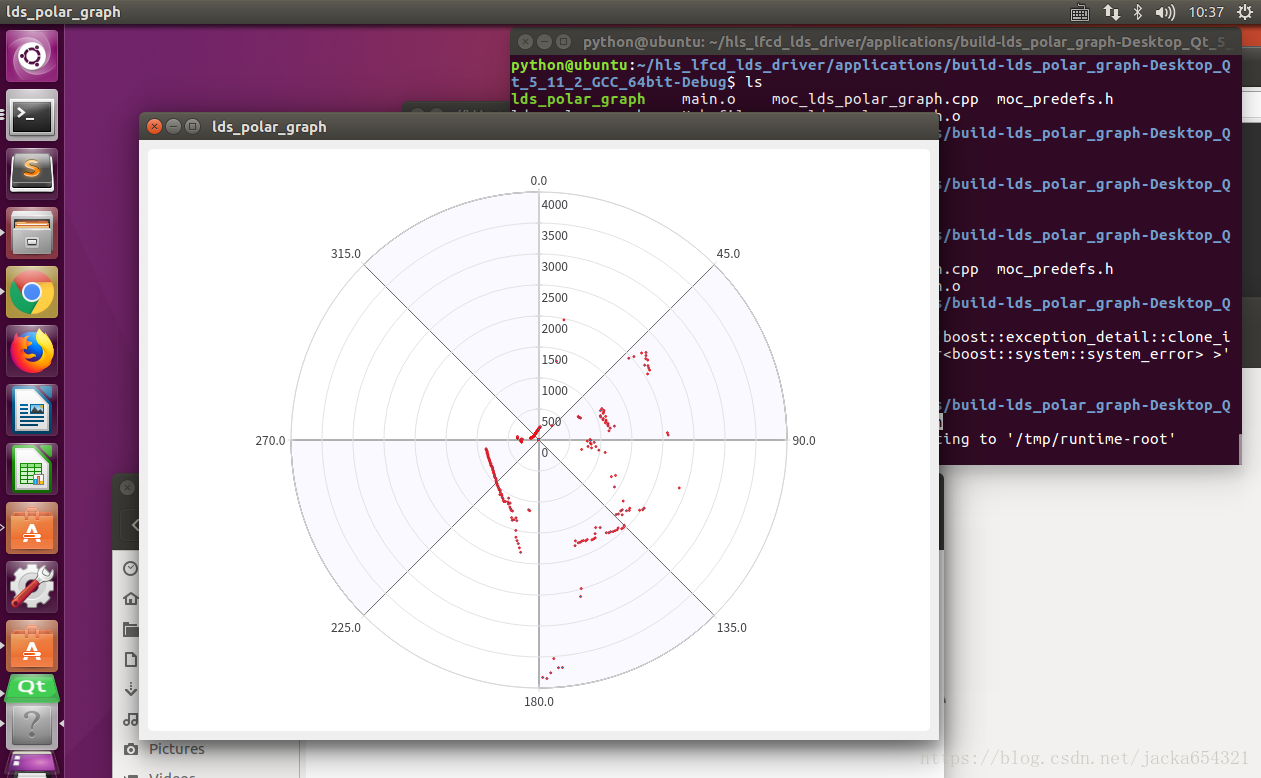
打开build的文件夹,sudo运行:
~/hls_lfcd_lds_driver/applications/build-lds_polar_graph-Desktop_Qt_5_11_2_GCC_64bit-Debug
sudo ./lds_polar_graph
终于成功打开:
参考链接:
ROS与激光雷达入门教程-ROS中使用激光雷达(Neato XV-11)
https://www.ncnynl.com/archives/201611/1090.html
Ubuntu16.04+Ros Kinetic+TurtleBot3仿真搭建教程
https://www.jianshu.com/p/014552bcc04c
ROS的安装、测试及环境配置介绍
https://www.jianshu.com/p/18af3ea856a4?utm_campaign=maleskine&utm_content=note&utm_medium=seo_notes&utm_source=recommendation
docker中的ROS容器与ROS主机的连接
https://blog.csdn.net/Chenming_Hnu/article/details/60469410
在ROS中使用Neato XV-11 激光雷达
https://blog.csdn.net/zqxf123456789/article/details/52748076
https://github.com/rohbotics/xv_11_laser_driver
ROS探索总结(十九)——如何配置机器人的导航功能
https://blog.csdn.net/hcx25909/article/details/50539417
Neato XV-11 to ROS, SLAM – Tutorial
http://meetjanez.splet.arnes.si/2015/08/22/neato-xv-11-to-ros-slam/
Turtlebot3入门教程-硬件-LDS
https://www.ncnynl.com/archives/201702/1404.html
hls_lfcd_lds_driver
http://wiki.ros.org/hls_lfcd_lds_driver
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)