- 引言
惯性测量单元(Inertial Measurement Unit, IMU)主要用来检测和测量加速度、倾斜、冲击、振动、旋转和多自由度运动。通常是指使用加速度计和陀螺仪来测量物体单轴、双轴或三轴姿态角(或角速率)以及加速度的装置。狭义上,一个IMU内在正交的三轴上安装陀螺仪和加速度计,共6个自由度,来测量物体在三维空间中的角速度和加速度,这就是我们熟知的“6轴IMU”;广义上,IMU可在加速度计和陀螺仪的基础上加入磁力计,可形成如今已被大众知晓的“9轴IMU”,可用于提升航向角的测量精度。
其中,陀螺仪用于测量设备自身的旋转运动,但不能确定设备的方位。加速计被用于测量设备的受力情况,擅长探测设备相对外部参考物(比如,地面)的运动。但对于设备相对于地面的摆放姿势的测量,则精确度不高。磁力计主要用于定位设备的方位,可以测量当前设备与东南西北四个方向的夹角。所以,利用陀螺仪可以知道“我们转了个身”,利用加速计可以得知“我们又向前走了几米”,而通过磁力计则可明确“我们是向西方向”的。
IMU在导航中的核心价值无可替代,为了提高其可靠性,还可以为每个单轴配备更多种类的传感器。为保证测量准确性,一般IMU要安装在被测物体的重心上。IMU应用广泛,除了在专业导航中使用,其应用范围涉猎远至军事防御、航空航天、海事等领域,近至日常的智能手机、汽车/火车、无人驾驶、智能家居等方面均会使用。
因为IMU由加速度计、陀螺仪和磁力计构成,则调研中分别介绍了这三者的原理、分类和主要参数。
- 加速度计简介
加速度计是一种能够测量加速度的传感器。传统机械加工方法制造的加速度计因体积大、质量大、成本高,应用场合受到很大限制。随着微机电系统(Micro Electro Mechanical System)技术的发展,国内外都将微加速度计开发作为微机电系统产品化的优先项目。微加速度计与通常的加速度计相比,具有很多优点:体积小、重量轻、成本低、功耗低、可靠性好等。它可以广泛运用于航空航天、汽车工业、工业自动化及机器人等领域,具有广阔的应用前景。
-
- 加速度计原理
加速度计的本质是检测力而非加速度,即加速度计的检测装置捕获的是引起加速度的惯性力,随后可利用牛顿第二定律获得加速度值,原理可抽象如下:
有一个小球位于一个盒子的正中央,假定该盒子不在重力场中或者其他任何会影响球的位置的场中,如图1(a)。给盒子分配三对墙(移除Y+以此来观察),并假设每面墙都能感测压力。如果突然把盒子向左移动,那么球会撞上X-墙,如图1(b)。通过检测球撞击墙面产生的压力,便可得到相应的加速度值。

图1.加速度计工作原理图
-
- 加速度计分类
加速度计是一种能够测量加速度的传感器。通常由质量块、阻尼器、弹性元件、敏感元件和适调电路等部分组成。传感器在加速过程中,通过对质量块所受惯性力的测量,利用牛顿第二定律获得加速度值。结构包括由硅膜片、上盖、下盖,膜片处于上盖、下盖之间,键合在一起。一维或二维纳米材料、金电极和引线分布在膜片上,并采用压焊工艺引出导线。根据传感器敏感元件的不同,常见的加速度传感器包括电容式、压阻式、压电式等。
- 压电式
压电式加速度传感器主要由质量块、压电元件和支座组成,本质为弹簧质量系统原理。
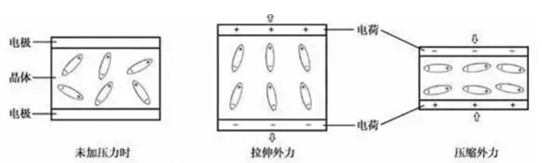
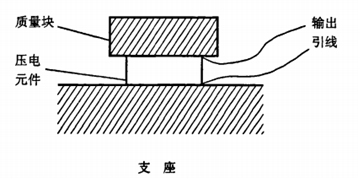
图3. 电加速度传感器工作原理示意图
支座与待测物刚性地固定在一起。当待测物运动时,支座与待测物以同一加速度运动,压电元件受到质量块与加速度相反方向的惯性力的作用,在晶体的两个表面上产生交变电荷(电压)。当振动频率远低于传感器的固有频率时,传感器的输出电荷(电压)与作用力成正比。电信号经前置放大器放大,即可由一般测量仪器测试出电荷(电压)大小,从而得出物体的加速度。输出电荷大小与加速度的关系如下:

其中,q为输出电荷,d为压电常数,m为质量块质量,a为测试件加速度。
- 压阻式
压阻式加速度传感器是最早开发的硅微加速度传感器(基于MEMS硅微加工技术)。压阻效应的原理为:半导体(单晶硅)材料受到外力作用,产生肉眼无法察觉的极微小应变,其原子结构内部的电子能级状态发生变化,从而导致其电阻率剧烈的变化,由其材料制成的电阻也就出现极大变化,这种物理效应叫半导体压阻效应。
压阻式加速度传感器的弹性元件一般采用硅梁外加质量块的悬臂梁结构,主要有单悬臂梁结构和双端固支悬臂梁结构。其结构动态模型仍然是弹簧质量系统。

图4. 硅悬臂梁结构
所示为单悬臂梁结构,其一端为自由端,固定有质量块,用来敏感加速度,悬臂梁的另一端为固定端,并通过扩散工艺在悬臂梁根部制作一个压敏电阻。悬臂梁根部所受到的应力为:

式中,m为质量块的质量,b为悬臂梁的宽度,h为悬臂梁的厚度,l为质量块到悬臂梁根部的距离,a为加速度。则电阻的变化率为

式中,π为压阻系数。压阻式加速度传感器的质量块在加速度的惯性力作用下发生位移,使固定在悬臂梁上的压敏电阻发生形变,电阻率发生变化,压敏电阻的阻值也相应的变化。通过测试电阻的变化量,可以得到加速度的大小。
- 电容式
电容式加速度传感器的基本原理就是将电容作为检测接口,来检测由于惯性力作用导致惯性质量块发生的微位移,一般也采用弹簧质量系统。主要可以分为变间距式和变面积式。
变间距式的加速度传感器由两块极板构成,一个为固定极板,另一个为可动极板。如图5左图所示。
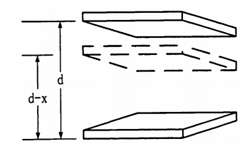
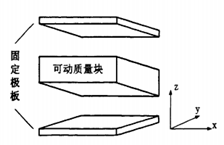
图5. 变间距式电容原理图
固定极板固定在壳体上,可动极板固定在敏感质量块上,设质量为m,敏感质量块会连接弹性系数为k的弹簧片或弹性梁,两块极板之间的间距为d。当受到z轴方向的加速度时,平行板电容器的电容值就会发生相应的改变,则测得的加速度值如下。其中,S为两极板的正对面积; 为真空中的介电常数;
为真空中的介电常数; 为两个极板中所含介质的相对介电常数,
为两个极板中所含介质的相对介电常数, 为平行板的电容变化量:
为平行板的电容变化量:

实际应用中,经常会采用差分电容的方式,变间距式微机械加速度传感器的差分电容的示意图如图5右侧图所示。采用差分电容的好处在于,在使用一块可懂质量块的情况下,加速度计的电容灵敏度增大了一倍。
变面积式的加速度传感器同样由固定极板与可动极板构成,如图6左图所示。可动极板连接敏感质量块。当加速度传感器受到x轴方向上的加速度时,可动极板会产生x的位移,从而两板的正对面积会减少,从而引起平行板电容值的变化。平板电容器的电容变化为:
而
由此可知,加速度大小与平板电容器的电容变化成线性关系。在相当大的加速度输入的情况下,变面积式电容微机械加速度计的输出的线性度优于变间距式的输出线性度。而实际的加速度计中,一般也采用差分电容的检测方式,如图6右图。

- 伺服式
伺服式加速度传感器是一种闭环测试系统。传感器的振动系统由“m-k”系统组成,与一般加速度计相同,但质量m上还接着一个电磁线圈,当基座上有加速度输入时,质量块偏离平衡位置,该位移大小由位移传感器检测出来,经伺服放大器放大后转换为电流输出,该电流流过电磁线圈,在永久磁铁的磁场中产生电磁恢复力,力图使质量块保持在仪表壳体中原来的平衡位置上,所以伺服加速度传感器在闭环状态下工作。由于有反馈作用,增强了抗干扰的能力,提高测量精度,扩大了测量范围。

图7. 伺服式加速度计原理图
下表是四种加速度传感器的比较:

图8. 四种加速度传感器特点及应用比较列表
压电式加速度传感器具有动态范围大、频率范围宽、坚固耐用、受外界干扰小以及压电材料受力自产生电荷信号不需要任何外界电源等特点,是被最为广泛使用的振动测量传感器(?)。虽然压电式加速度传感器的结构简单,商业化使用历史也很长,但因其性能指标与材料特性、设计和加工工艺密切相关,因此在市场上销售的同类传感器性能的实际参数以及其稳定性和一致性差别非常大。与压阻和电容式相比,其最大的缺点是压电式加速度传感器不能测量零频率的信号。使用压电加速度计时,所用放大器低频截止频率多为2-5Hz,目的是以此来剔除许多压电传感器的热释电输出。
压阻式加速度传感器从低灵敏度高量程的冲击测量,到直流高灵敏度的低频测量都有相应的产品。同时压阻式加速度传感器测量频率范围也可从零频直流信号到几十千赫兹的高频信号。超小型化的设计也是压阻式传感器的一个亮点。需要指出的是尽管压阻敏感芯体的设计和应用具有很大灵活性,但对某个特定设计的压阻式芯体而言其使用范围一般要小于压电型传感器。压阻式加速度传感器的另一缺点是受温度的影响较大,实用的传感器一般都需要进行温度补偿。在价格方面,大批量使用的压阻式传感器成本价具有很大的市场竞争力,但对特殊使用的敏感芯体制造成本将远高于压电型加速度传感器。
电容式加速度计与其它类型的加速度传感器相比具有灵敏度高、零频响应、环境适应性好等特点,尤其是受温度的影响比较小;但不足之处表现在信号的输入与输出的非线性较差,量程有限,受电缆的电容影响。在实际应用中电容式加速度传感器较多地用于低频测量,其通用性不如压电式加速度传感器,且成本也比压电式加速度传感器高得多。
-
- 加速度计主要参数
以ADI的三轴加速度计ADXL345为例,简述主要参数的意义。

图9. 加速度计ADXL345规格参数列表
指加速度计可以测量的加速度范围,该值越大表示测量加速度大小的能力越强。针对不同的应用要合理选择测量范围,因测量范围大了,灵敏度会相应降低,除非选择更高精度的ADC。
对于ADXL345而言,有±2g,±4g, ±8g, ±16g四个测量范围可选。
灵敏度表示在规定的输入加速度下能敏感的最小加速度增量,即加速度传感器对一定范围内的加速度变化的敏感程度。灵敏度越高的加速度传感器对加速度变化更敏感,输出电压的变化也越大,就越容易测量,从而获得更精确的测量值。
最小加速度也称最小分辨率,考虑到后级放大电路噪声问题,应尽量远离最小可用值,以确保最佳信噪比。
灵敏度计算:例ADXL345的量程为±2g,输出的位数为10位(2的10次方共1024个LSB)对应满量程,那么灵敏度就是4g/1024LSB=3.9mg/ LSB(1个数字代表的加速度为3.91mg),取倒数为256 LSB/g(1g的加速度对应的输出是256个数字)。
它指定当测量轴加速度为0g时的器件输出。可以用电压值给出(模拟输出器件),或以LSB的形式给出(数字输出器件),或者用mg的形式给出。可以理解为静态误差,不会随时间波动。用户将在时可将测得的值直接减去0g偏置进行补偿。比如ADXL345的X,Y轴的0g偏置是±150mg。
通常会有几种表示方式:
- 在25℃条件下,距离理想值得偏差
- 0g偏置随温度的变化,即每变化1℃,输出变化多少mg
- 包含所有误差的总偏置
采用哪种表示方式取决于芯片定义的应用市场,要看其传统的定义方式是什么。
噪声输出的功率谱密度,一般以µg/√Hz的方式给出,带宽越高噪声越大,带宽大致等于输出数据速速率的一半,因此输出速率设定越高,噪声越大。
总噪声由噪声密度和带宽(BW)决定:总噪声=噪声密度*SQRT(1.6*BW)。对于不同应用要选择合适的带宽以降低总噪声。通常人的各种运动在50到100Hz;倾角检测约为5Hz;冲击检测 >1kHz。
噪声的特性决定了器件的精度,ADC的分辨率低于噪声后就没有意义。
- 输出数据速度和带宽(OUTPUT DATA RATE AND BANDWIDTH)
输出数据速度(ODR)是指单位时间内在信道上传输的信息量(比特数)。带宽为ODR的1/2。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)