文章目录
- 1 VINS-fusion的安装
- 1.1 环境和依赖的安装
- 1.2 编译VINS-Fusion
- 1.3 编译错误解决方法
- 2 VINS-Fusion跑数据集
- 3 用相机运行VINS-Fusion
环境:Ubuntu20.04 + ROS-Noetic
1 VINS-fusion的安装
1.1 环境和依赖的安装
编译VINS需要ROS,Ceres和Eigen,Ceres需要依赖Eigen,所以先安Eigen才能安装Ceres,但是由于安装ROS-noetic也自动通过apt安装了Eigen3.3.7版(这个版本还行,如果想安装其他版本可以通过源码方式安装),所以安装完ROS可以直接安装Ceres,Ceres安装1.14版即可,安装最新2.x版本会报错。
- 安装ros-noetic
可以搜索鱼香ROS一键安装,很方便。
- 安装Ceres1.14
开头说了Ceres的依赖Eigen已经在安装ros时通过apt安装了,但是我是通过源码安装了Eigen,因为上过SLAM十四讲的都会把一堆第三方库通过源码安装,能更好滴管理库的版本,用apt安装的大都是很新的版本,但是新的不一定稳定,可能会报一堆错,所以会选择源码的方式安装稳定版本的第三方库,那既然说到这了,就写一下用源码安装Eigen的过程,做不做这步你们随意。
安装Eigen3.3.9:
进入官网下载界面下载Eigen3.3.9的Source code(zip),并解压,可以保存在一个文件夹里便于查看以及误删后的再次安装。
安装命令:
1 右键点击文件夹,选在终端打开
mkdir build && cd build
2 在build路径下输入
cmake ..
3 安装
sudo make install
简简单单就安装成功了,由于Eigen是由纯头文件组成的库,所以可以在/usr/local/include/eigen3/目录下看到。
由于有多个版本(多版本管理请自行查找),可以用命令行查看当前使用的Eigen版本,
pkg-config --modversion eigen3,结果如下,

安装Ceres1.14:
进入官网下载界面下载Ceres1.14的源码并解压,如果不能进入github可以上gittee上搜一搜。
首先需要安装一些依赖:
sudo apt install libgoogle-glog-dev libgflags-dev
sudo apt install libatlas-base-dev
sudo apt install libsuitesparse-dev
安装命令:
1 右键点击文件夹,选在终端打开
mkdir build && cd build
2 在build路径下输入
cmake ..
3 编译一下
make -j4
4 测试
make test
5 安装
sudo make install
至此Ceres也安装完成了,VINS-fusion的环境准备工作结束了。
1.2 编译VINS-Fusion
首先创建一个ros工作空间,可以和上篇文章Ubuntu20.04安装D435i相机驱动中的realsense-ros工作空间catkin_ws放在一起,这样后面用相机运行VINS就不用source两遍了。
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/VINS-Fusion.git
cd ..
catkin_make
此时就会报一堆由OpenCV版本引起的错误。
1.3 编译错误解决方法
由于ROS-noetic安装时自动安装了OpenCV4.2,而VINS运行需要的是OpenCV3,主要在文件夹camera_model中两个文件添加缺失的头文件即可。
在下图两个文件中分别添加78两行头文件,
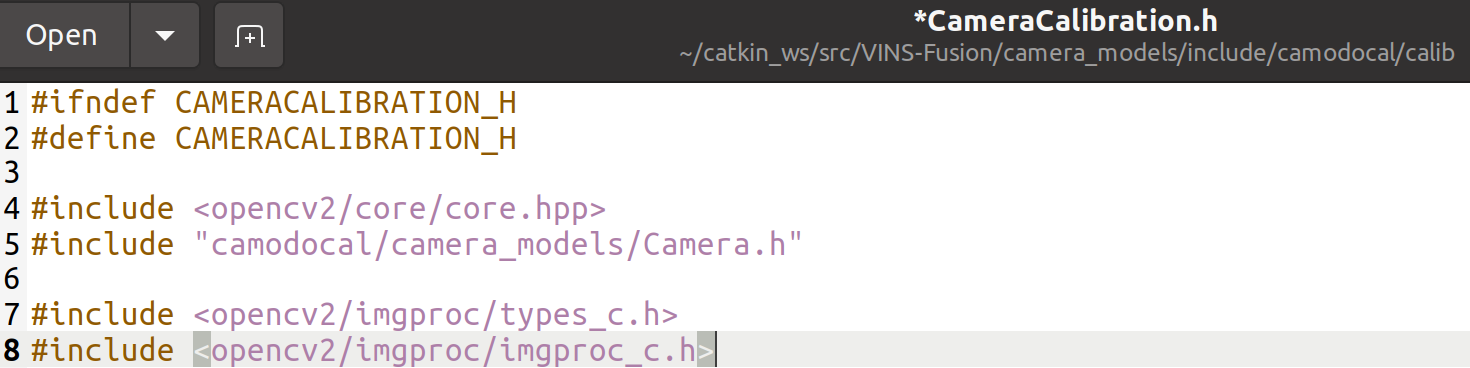
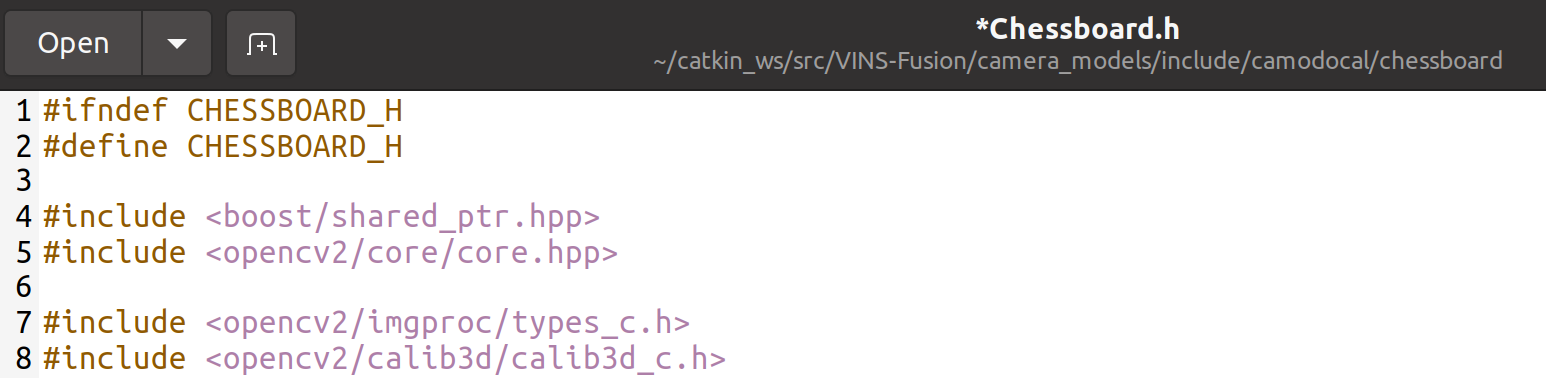 代码如下,可直接复制
代码如下,可直接复制
接下来还会遇到几个not declared的错误,按下面方法对报错文件逐一进行修改即可。
- error: ‘CV_FONT_HERSHEY_SIMPLEX’was not declared in this scope
将所有报这个错的文件中CV_FONT_HERSHEY_SIMPLEX 参数改为 cv::FONT_HERSHEY_SIMPLEX
- error: ‘CV_LOAD_IMAGE_GRAYSCALE’ was not declared in this scope
将所有报这个错的文件中CV_LOAD_IMAGE_GRAYSCALE 参数改为 cv::IMREAD_GRAYSCALE
- error: ‘CV_RGB2GRAY’ was not declared in this scope
将所有报这个错的文件中添加#include <opencv2/imgproc/types_c.h>
都修改完成之后就可以编译成功了。
2 VINS-Fusion跑数据集
以EuRoC数据集为例,这个数据集是ETH大学用无人机录制的,数据集可去官网下载(如果你现在还不能科学上网,你应该知道科学上网的重要性了),下载MH_01_easy.bag文件就行。
输入下列命令运行双目+IMU:
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
(optional) rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml
rosbag play YOUR_DATASET_FOLDER/MH_01_easy.bag
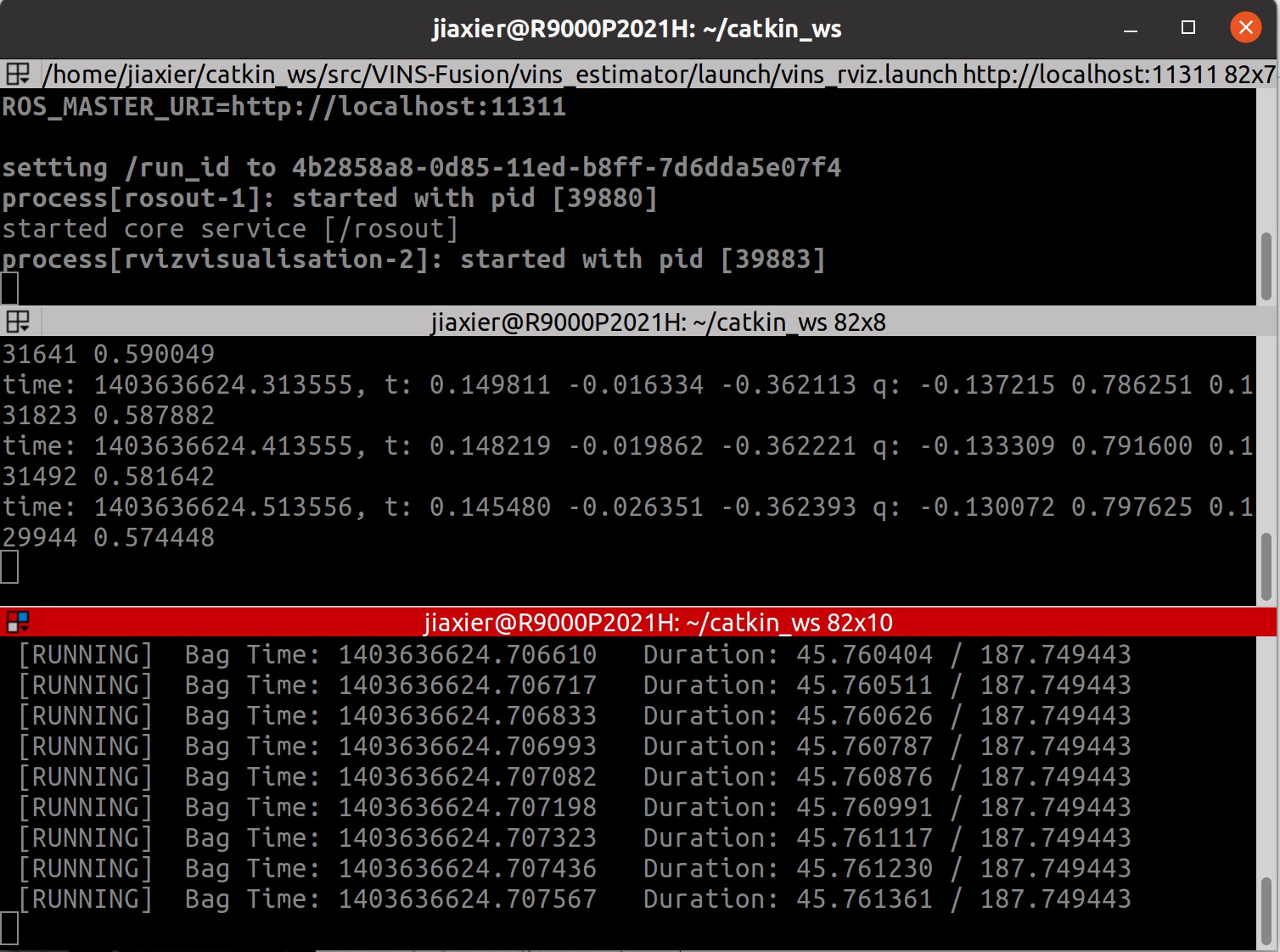
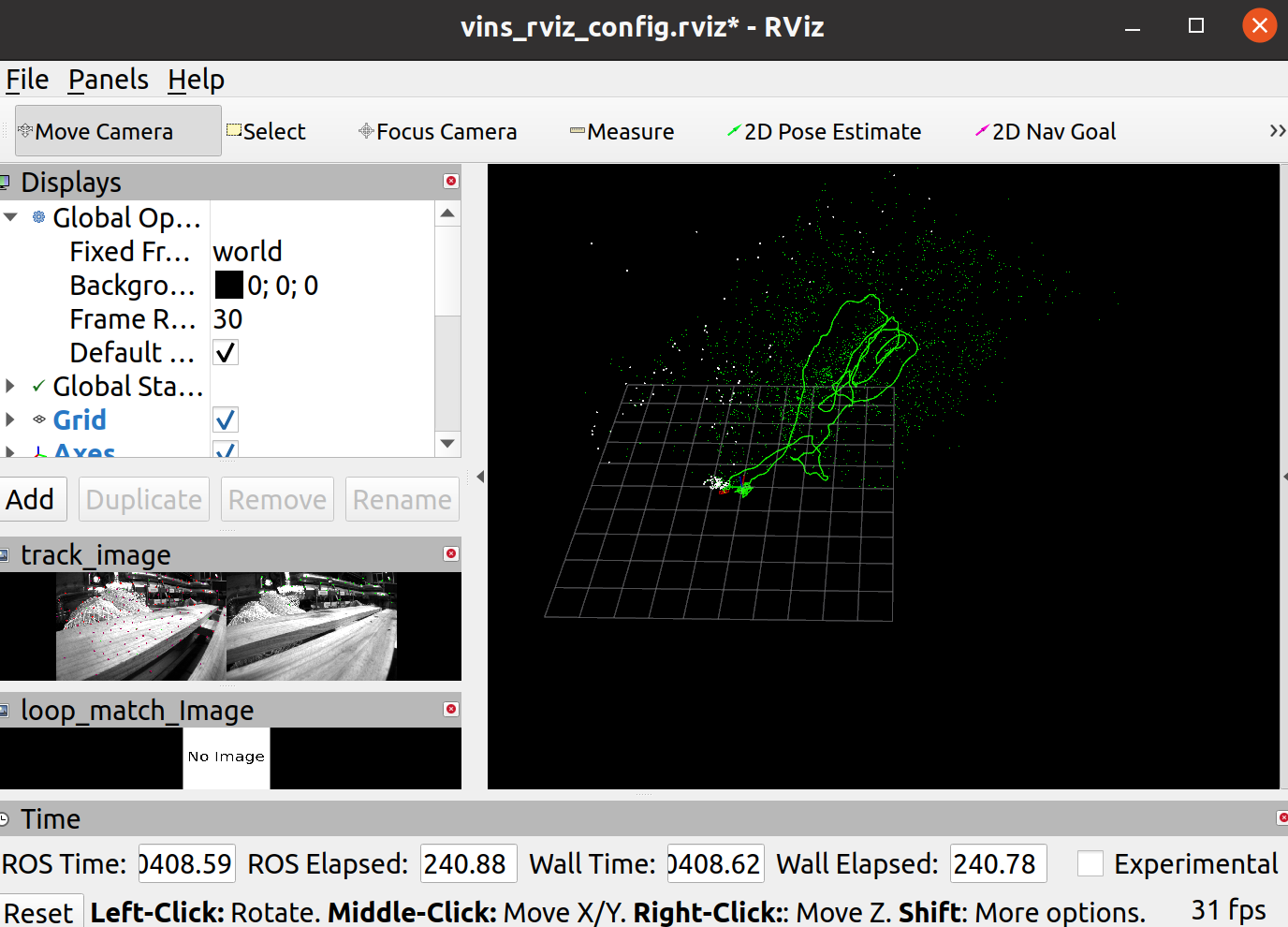
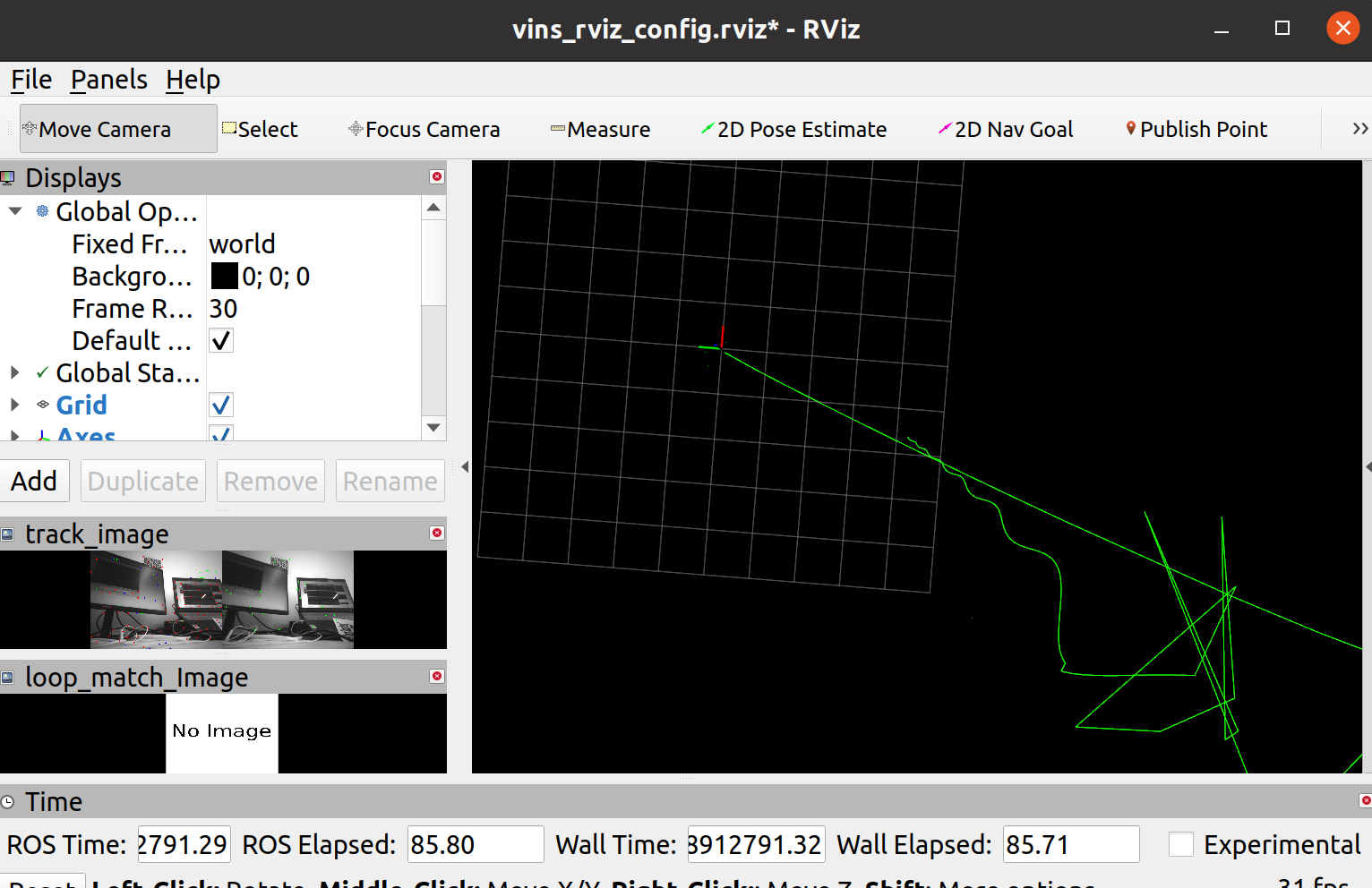
不带回环检测的命令及结果如下所示,
 下面就可以用相机运行VINS-Fusion了,和跑数据集唯一的不同就是用相机的发布到话题的数据代替了ros bag记录的数据的播放。
下面就可以用相机运行VINS-Fusion了,和跑数据集唯一的不同就是用相机的发布到话题的数据代替了ros bag记录的数据的播放。
3 用相机运行VINS-Fusion
修改文件realsense-ros中的rs_camera.launch文件,可以复制一个命名为rs_camera_vins.launch能保留原文件。直接复制下面代码就行,
<launch>
<arg name="serial_no" default=""/>
<arg name="usb_port_id" default=""/>
<arg name="device_type" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<arg name="fisheye_width" default="640"/>
<arg name="fisheye_height" default="480"/>
<arg name="enable_fisheye" default="false"/>
<arg name="depth_width" default="640"/>
<arg name="depth_height" default="480"/>
<arg name="enable_depth" default="true"/>
<arg name="infra_width" default="640"/>
<arg name="infra_height" default="480"/>
<arg name="enable_infra1" default="true"/>
<arg name="enable_infra2" default="true"/>
<arg name="color_width" default="640"/>
<arg name="color_height" default="480"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="30"/>
<arg name="depth_fps" default="30"/>
<arg name="infra_fps" default="30"/>
<arg name="color_fps" default="30"/>
<arg name="gyro_fps" default="200"/>
<arg name="accel_fps" default="250"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>
<arg name="enable_pointcloud" default="false"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="enable_sync" default="true"/>
<arg name="align_depth" default="true"/>
<arg name="publish_tf" default="true"/>
<arg name="tf_publish_rate" default="0"/>
<arg name="filters" default=""/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="unite_imu_method" default="linear_interpolation"/>
<arg name="topic_odom_in" default="odom_in"/>
<arg name="calib_odom_file" default=""/>
<arg name="publish_odom_tf" default="true"/>
<arg name="allow_no_texture_points" default="false"/>
<arg name="emitter_enable" default="false"/>
<!-- rosparam set /camera/stereo_module/emitter_enabled false -->
<rosparam>
/camera/stereo_module/emitter_enabled: 0
</rosparam>
<rosparam if="$(arg emitter_enable)">
/camera/stereo_module/emitter_enabled: 1
</rosparam>
<group ns="$(arg camera)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="usb_port_id" value="$(arg usb_port_id)"/>
<arg name="device_type" value="$(arg device_type)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/>
<arg name="publish_tf" value="$(arg publish_tf)"/>
<arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
<arg name="topic_odom_in" value="$(arg topic_odom_in)"/>
<arg name="calib_odom_file" value="$(arg calib_odom_file)"/>
<arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
<arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/>
</include>
</group>
</launch>
主要改变就是把角速度和加速度话题合并成IMU话题,这样vins能接收到,还有一些改变可查看realsense-ros的readme查看具体意思。
接下来可以运行了,输入下列命令,
roslaunch vins vins_rviz.launch
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/realsense_d435i/realsense_stereo_imu_config.yaml
roslaunch realsense2_camera rs_camera_vins.launch
 这三条命令需要特别注意第二条命令,我们可以看到yaml存在的路径很长,所以自然想到可以先进入到~/catkin_ws/src/VINS-Fusion/config/realsense_d435i目录下运行
这三条命令需要特别注意第二条命令,我们可以看到yaml存在的路径很长,所以自然想到可以先进入到~/catkin_ws/src/VINS-Fusion/config/realsense_d435i目录下运行rosrun vins vins_node realsense_stereo_imu_config.yaml,但是这会报一个惊天大错,Assertion “!px=0” failed,如下图所示,
 这是一个智能指针错误,我一直以为和库的环境有关系,主要是被issue里一个大哥误导了,他说他重新安装了一个稳定的Eigen和Ceres就好了,但是我换了好几次有时候好使有时候不好使,卡了我两三天最后终于找到了这篇博客,大家可以点进去看看,在parameter.cpp中它规定的路径格式就是得带一个"/",所以前边至少带一个上级目录,这样就不会报错了,当然像这篇博客中把configpath和/删掉之后就可以直接运行
这是一个智能指针错误,我一直以为和库的环境有关系,主要是被issue里一个大哥误导了,他说他重新安装了一个稳定的Eigen和Ceres就好了,但是我换了好几次有时候好使有时候不好使,卡了我两三天最后终于找到了这篇博客,大家可以点进去看看,在parameter.cpp中它规定的路径格式就是得带一个"/",所以前边至少带一个上级目录,这样就不会报错了,当然像这篇博客中把configpath和/删掉之后就可以直接运行rosrun vins vins_node realsense_stereo_imu_config.yaml了。
我们可以看到图中定位已经飞了,所以需要对相机进行标定,下篇进入相机标定。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)