一、问题
reading in sources list data from /etc/ros/rosdep/sources.list.d
Hit https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml
ERROR: unable to process source [https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml]:
<urlopen error ('_ssl.c:711: The handshake operation timed out',)> (https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml)
根据提示:访问上面的网址超时了
但是我用主机浏览器是可以进行访问的
二、解决方法
发现主要在打开20-default.list里的链接时失败,也就是无法下载20-default.list列举的几个配置文件。有了这个发现,下面的事情就是,把这些文件下载到本地,然后修改20-default.list脚本文件就可以了。
主要参考该作者的方法
安装ROS, 初始化时rosdep update出错解决办法_super_sean的博客-CSDN博客
# os-specific listings first
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
yaml file:///etc/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
# generic
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
#gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
yaml file:///etc/ros/rosdistro/master/rosdep/base.yaml
yaml file:///etc/ros/rosdistro/master/rosdep/python.yaml
yaml file:///etc/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro file:///etc/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
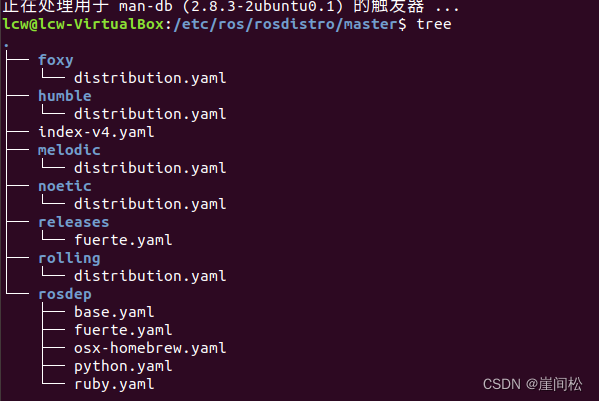
利用浏览器进行下载并放置在对应的目录下
/etc/ros/rosdistro/master
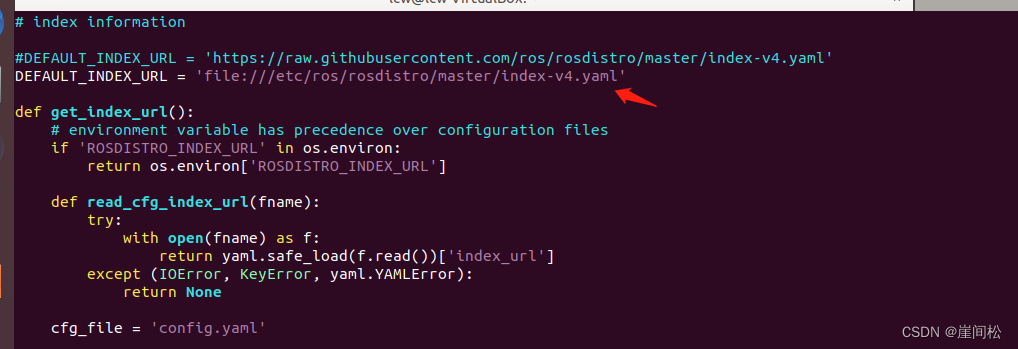
修改从文件中进行加载
三、解决后的结果

终于完成了更新
四、其他资源
https://blog.csdn.net/Draonly/article/details/103448878
ubuntu安装ROS进行到rosdep update时出现错误,如ERROR: unable to process source ..._学习道路上的小学生的博客-CSDN博客
安装ROS, 初始化时rosdep update出错解决办法_super_sean的博客-CSDN博客
https://www.cnblogs.com/zxzmnh/p/11758103.html
rosdep init ROS安装问题解决方案 - 古月居
rosdep init 或者rosdep update 连接错误的解决办法 | 蓝鲸ROS机器人论坛
ROS:sudo rosdep init出错常规方法都无效后解决办法记录 - 知乎
https://blog.csdn.net/qq_70482640/article/details/125131070
Ubuntu18.04 melodic 安装与下载ROS(超详细教程) - 古月居

melodic/Installation/Ubuntu - ROS Wiki
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)