一、MPU6050简介
1、内部主要结构:
陀螺仪、加速度计、数字运动处理器DMP(Digital Motion Processor)
PS: MPU6050还含有第二IIC接口,用于连接一个 第三方数字传感器AUXAUX_DA(eg.磁力计),就可以通过IIC接口输出完整的9轴信号。(否则只有6轴)。
2、连接接口:
(1)IIC接口:SCL、SDA
(2)供电接口:VCC、GND
(3)外部接口(不常用):AUX_CL、
3、姿态角
通过MPU6050读取加速度和角度的原始数据,DMP将原始角速度转化为四元数,进而完成欧拉角的计算。
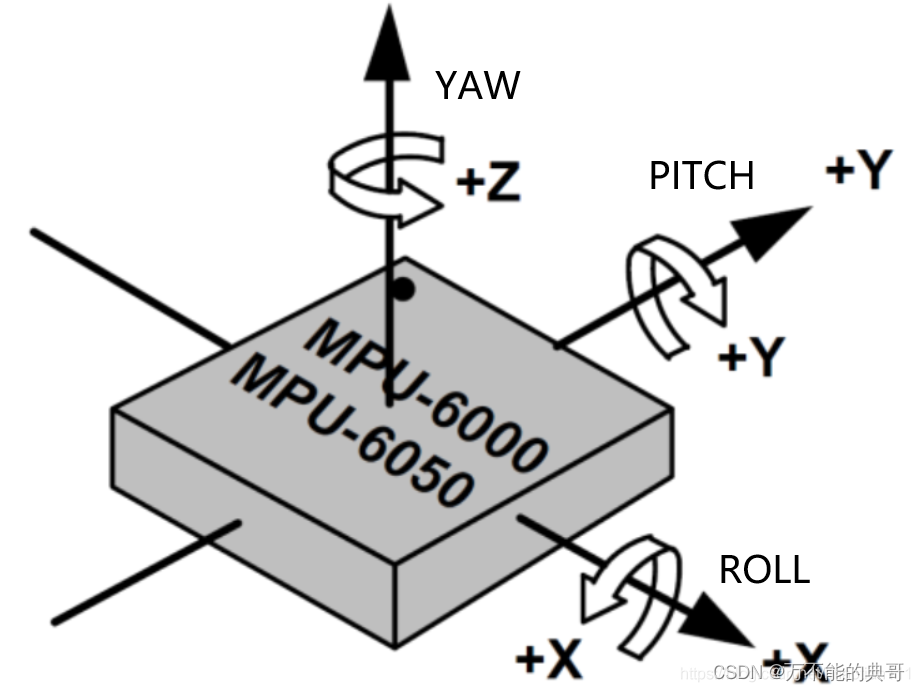
(旋转方向通过右手螺旋定则判断)
欧拉角:俯仰角pitch、横滚角roll、航向角yaw
PS:只有确定了x-y-z的先后转换的六种组合顺序,才能确定欧拉角所指的姿态角是什么。
4、内部电路结构解析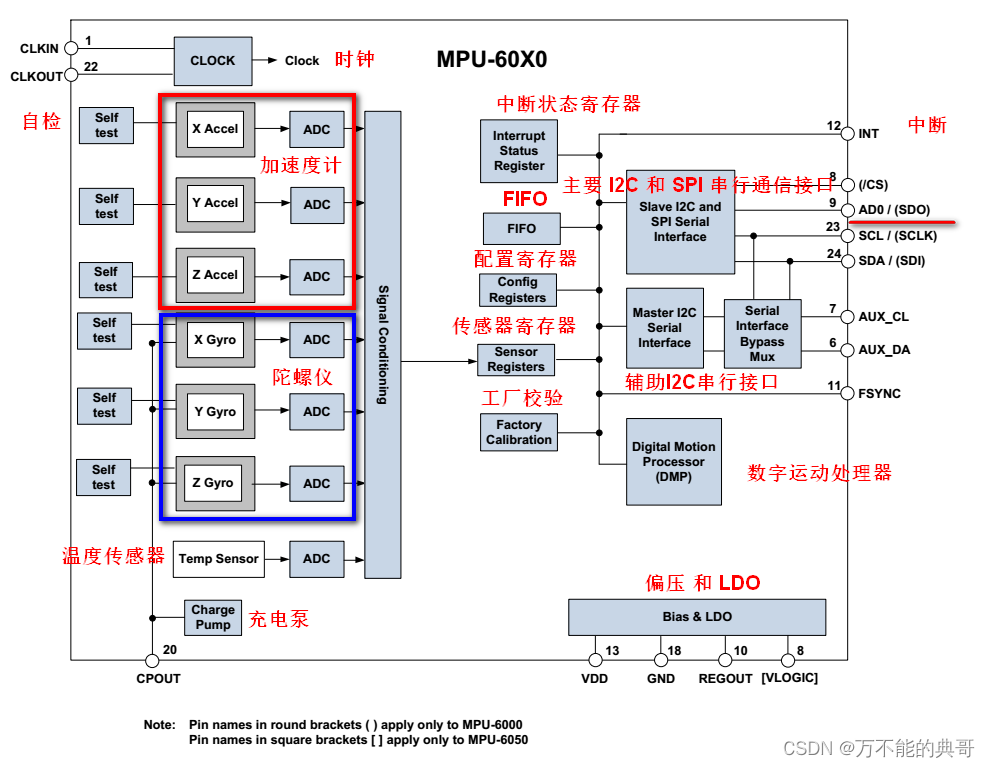
(1)16位ADC三轴加速度计:
三轴加速度计为每个轴使用单独的检测质量。
平坦放置时,x、y轴上为0g,z轴为1g
(2)16位ADC三轴陀螺仪:
当陀螺仪绕轴旋转时,模数转换器会对三个轴接受到的电压频率取样,陀螺仪传感器可以被解算为每秒±250,±500,±1000或±2000度(dps)。
二、程序配置
1、MPU6050初始化
(1)配置陀螺仪寄存器
用于设置陀螺仪的量程范围:(设置max值)
0,±250°/s;1,±500°/s;2,±1000°/s;3,±2000°/s;且陀螺仪的ADC为16位分辨率,可以此计算对应的灵敏度131、65.5、32.8、16.4LSB/(°/S)
(2)配置加速度计寄存器:(设置合适值)
用设置加速度计的量程范围:0,±2g;1,±4g;2,±8g;3,±16g;
对应的灵敏度为:16384、8192、4096、2048LSB/g
//初始化6050
unsgined char MPU6050_Init(void){
int i = 0;
IIC_Init(); //IIC初始化
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X80);//复位
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X00);//唤醒
i+ = MPU6050_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
i+ = MPU6050_Set_Accel_Fsr(1); //加速度传感器,±4g
i+ = MPU6050_Set_Rate(1000); //设置采样率1000Hz
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_INT_EN_REG,0X00); //关闭所有中断
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_CFG_REG,0x02); //设置数字低通滤波器 98hz
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_USER_CTRL_REG,0X00);//I2C主模式关闭
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_FIFO_EN_REG,0X00); //关闭FIFO
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_INTBP_CFG_REG,0X82);//INT引脚低电平有效,开启bypass模式
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT1_REG,0X01);//设置CLKSEL,PLL X轴为参考
i+ = MPU6050_Write_Byte(MPU6050_ADDR,MPU_PWR_MGMT2_REG,0X00);//加速度与陀螺仪都工作
i = MPU6050_Read_Byte(MPU6050_ADDR,WHO_AM_I); //读取MPU6500的ID
}
2、此外,还要配置IIC的初始化
void IIC_Init(void)
PIN_InitConfig(PD10,GPO,1,GPIO_Mode_Out_PP);
SDA_OUT;
IIC_SCL_H;
IIC_SDA_H;
IIC_Stop();
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)