OpenMV有很多示例代码,下面是我学习过程中有关知识的总结。
目录
前言
一、阈值选择
二.代码
前言
函数RGB(255,0,0)表示的是红色。
RGB(255,0,0)含义:红色值 Red=255;绿色值 Green=0;蓝色值 Green=0。
常见颜色:
黑色RGB:红色值 Red=0;绿色值 Green=0;蓝色值 Green=0;
蓝色RGB:红色值 Red=0;绿色值 Green=0;蓝色值 Green=255;
绿色RGB:红色值 Red=0;绿色值 Green=255;蓝色值 Green=0;
青色RGB:红色值 Red=0;绿色值 Green=255;蓝色值 Green=255;
一、阈值选择
1.点击工具

2.点击机器视觉,阈值编辑器。
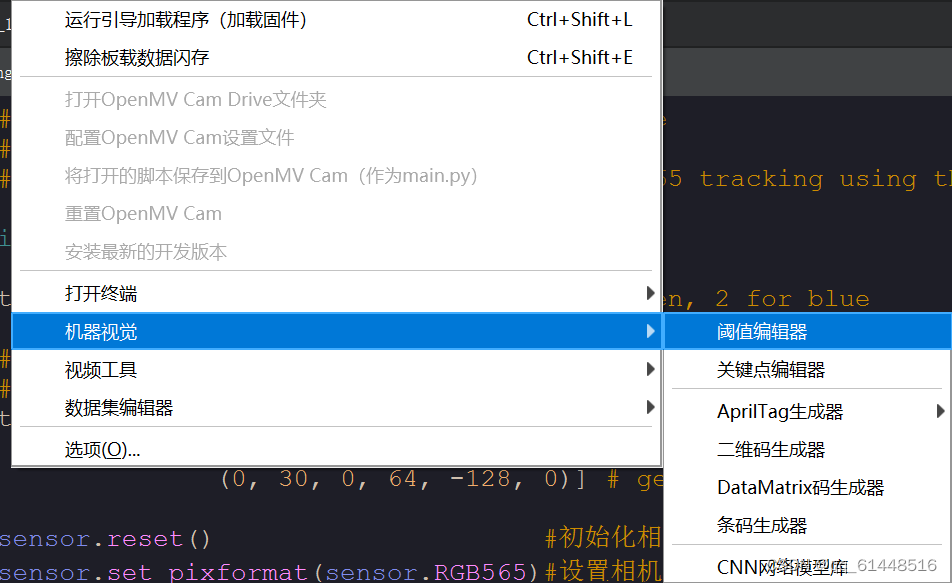 3.滑动下方滑块,当所要识别的色块如下图为白色时,滑块下方的列表(LAB阈值)所显示的阈值就是要是别的色块的阈值。
3.滑动下方滑块,当所要识别的色块如下图为白色时,滑块下方的列表(LAB阈值)所显示的阈值就是要是别的色块的阈值。
二.代码
# Single Color RGB565 Blob Tracking Example
#
# This example shows off single color RGB565 tracking using the OpenMV Cam.
import sensor, image, time, math
threshold_index = 0 # 0 for red, 1 for green, 2 for blue
# Color Tracking Thresholds (L Min, L Max, A Min, A Max, B Min, B Max)
# The below thresholds track in general red/green/blue things. You may wish to tune them...
thresholds = [(30, 100, 15, 127, 15, 127), # generic_red_thresholds
(30, 100, -64, -8, -32, 32), # generic_green_thresholds
(0, 30, 0, 64, -128, 0)] # generic_blue_thresholds
sensor.reset() #初始化相机传感器
sensor.set_pixformat(sensor.RGB565)#设置相机模块的像素模式
sensor.set_framesize(sensor.QVGA) #设置相机模块的帧大小
#感光元件sensor.VGA 640*480(只用于OpenMV Cam M7的灰度处理图像,或者彩图图像采集,但彩图不能用作图像处理)
sensor.skip_frames(time = 2000) #跳过2000ms的帧数
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # must be turned off for color tracking
clock = time.clock()
# Only blobs that with more pixels than "pixel_threshold" and more area than "area_threshold" are
# returned by "find_blobs" below. Change "pixels_threshold" and "area_threshold" if you change the
# camera resolution. "merge=True" merges all overlapping blobs in the image.
while(True):
clock.tick() #开始追踪运行时间
img = sensor.snapshot() #使用相机拍摄一张照片,并返回 image 对象
#find_blob 返回色块对象
for blob in img.find_blobs([thresholds[threshold_index]], pixels_threshold=200, area_threshold=200, merge=True):
# These values depend on the blob not being circular - otherwise they will be shaky.
if blob.elongation() > 0.5:
img.draw_edges(blob.min_corners(), color=(255,0,0)) #红色
img.draw_line(blob.major_axis_line(), color=(0,255,0)) #绿色
img.draw_line(blob.minor_axis_line(), color=(0,0,255)) #蓝色
# These values are stable all the time.
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
# Note - the blob rotation is unique to 0-180 only.
img.draw_keypoints([(blob.cx(), blob.cy(), int(math.degrees(blob.rotation())))], size=20)
print(clock.fps())#停止追踪运行时间,并返回当前FPS(每秒帧数)。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)