一、linux命令行使用基础:
1.cd命令(change directory):
(1)语法:
cd [dirName](dirName:要切换到的目录)
cd ..(返回上一级)
(2)功能:用于切换当前工作目录
2.pwd命令(printing working directory):
(1)语法:
pwd
(2)功能:用于显示当前工作目录
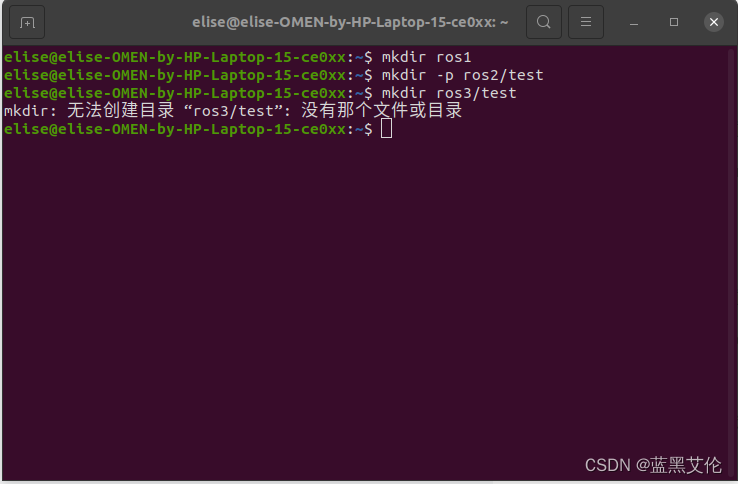
3.mkdir命令(make directory):
(1)语法:
mkdir [-p] dirName
(-p是为了确保目录名称存在,不存在的就建一个)
(2)功能:创建目录
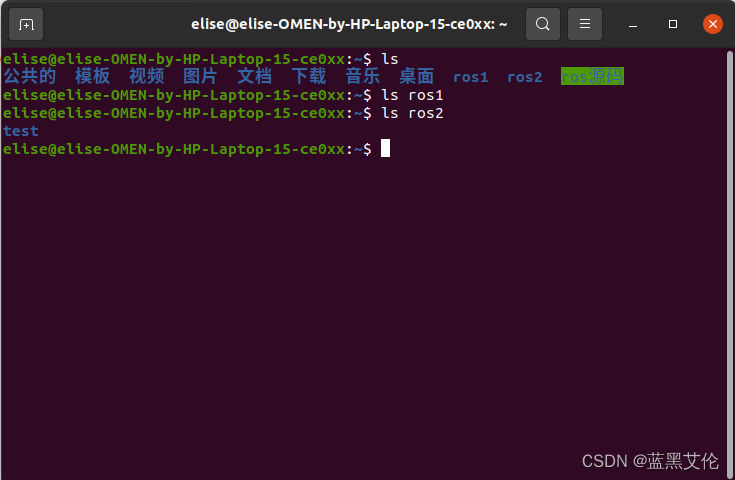
4.ls命令(list files):
(1)语法:
ls [-alrtAFR] [name..]
(2)功能:用于显示指定工作目录下的内容
5.touch命令(touch file):
(1)语法:
touch file
(2)功能:创建一个名为“file”的新的空白文件,相当于记事本

6.rm命令(remove):
(1)语法:
rm [options] name
(-r 将目录及以下的档案逐一删除/递归删除)
(2)功能:用于删除一个文件或者目录


7.mv命令(move file):
(1)语法:
mv [options] source dest
mv [options] source...directory
(2)功能:用来为文件或目录改名,或将文件或目录移入其它位置


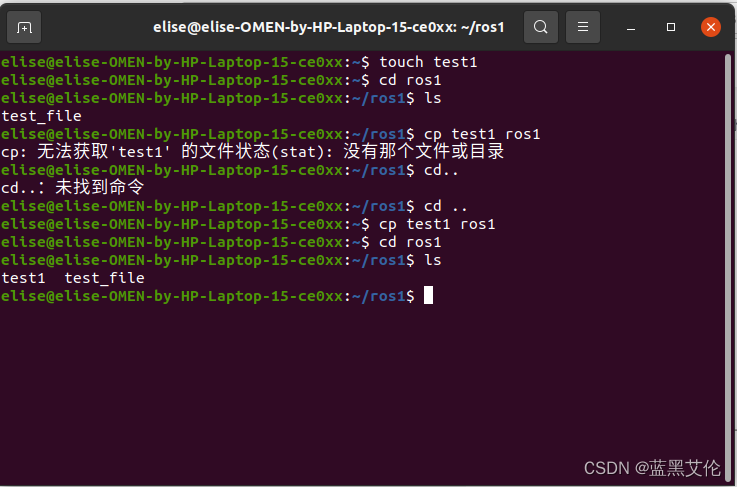
8.cp命令(copy file):
(1)语法:
cp [options] source dest
cp [options] source...directory
(2)功能:用于复制文件或目录
9.sudo命令:
功能:提升当前用户权限
二、ROS常用命令行工具:
1.roscore命令:
功能:运行主节点,主节点管理节点之间的消息通信中的连接信息
2.rosrun命令:
(1)语法:
rosrun [功能包名称] [节点名称]
(2)功能:执行指定的功能包中的一个节点的命令
3.rqt_graph命令:
功能:查看节点关系图
4.rosnode命令:
(1)安装rosnode

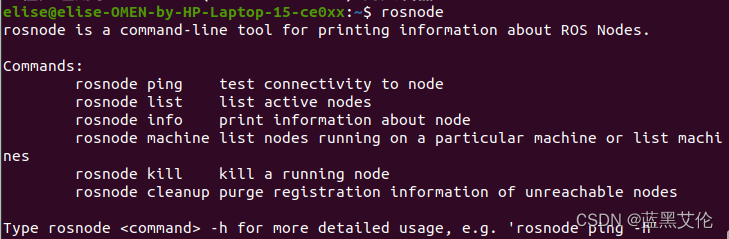
(2)rosnode命令列表(常用):
1)rosnode list:列出正在运行的所有节点
2)rosnode info [节点名称]:检查指定节点的信息
5.rostopic命令:

(1)rostopic命令列表(常用):
1)rostopic list: 列出活动话题
2)rostopic info [话题名称]:显示指定话题的消息
3)rostopic pub [话题名称] [消息类型] [参数]:使用指定的话题名称发布消息
(2)示例:通过命令行发布话题让小海龟跑起来
1)打开第一个终端,启动ROS Master:
2)打开第二个终端,启动海龟仿真器:

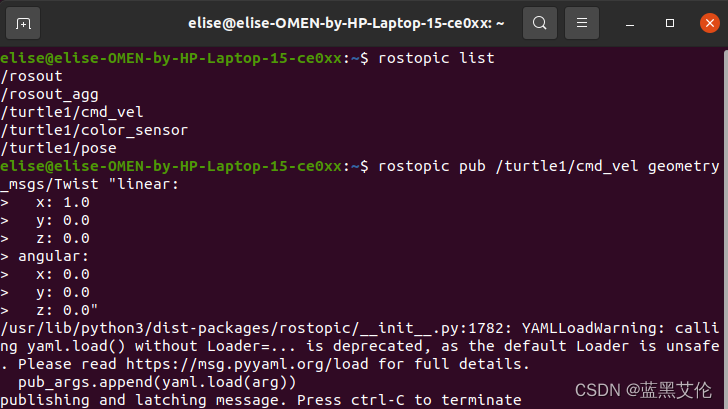
3)输入以下指令显示系统全部话题列表:
rostopic list
4)输入以下指令,通过指令给相应话题发布数据让小海龟运动:
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"
5)效果如下,小海龟移动了一小段距离:
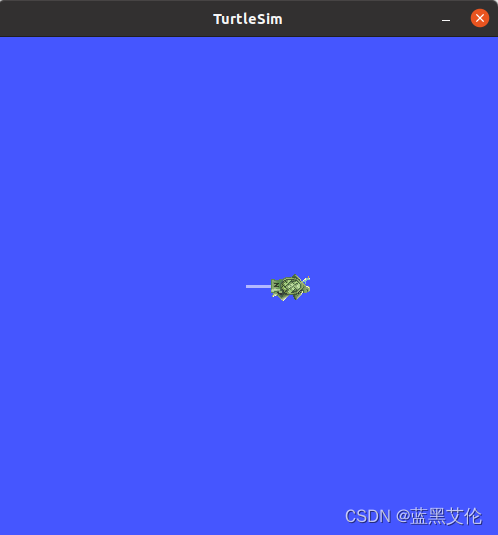
6)我们的指令是让海龟沿着x方向以1m/s的速度运动,但小海龟只移动了一小段距离便停下了,这是因为话题只发布了一次,要想让海龟一直移动,需要加一条循环指令:
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"
让这个指令每秒发送10次,便可得到以下结果:
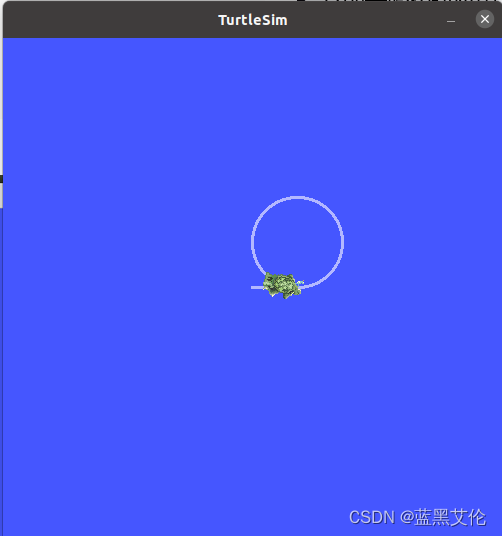
这样小海龟便会按指定的线速度和角速度作圆周运动。
6.rosmsg命令:
(1)语法:
rosmsg show [消息名称]
(2)功能:查看所发布话题消息的具体结构
7.rosservice命令:
(1)常用命令:
1)rosservice list:显示活动的服务信息
2)rosservice info [服务名称]:显示指定服务的信息
3)rosservice call [服务名称] [参数]:用输入的参数服务请求
(2)示例:通过命令行请求服务让两只小乌龟同时存在
链接:ROS基础(一)——命令行代码(以小乌龟程序为例)_北理光头强的博客-CSDN博客_ros小乌龟指令集合
8.rosbag命令:
(1)常用指令:
rosbag record [选项] [话题名称]:记录制定话题的消息
rosbag play [bag文件名]:回放制定的bag文件
(2)操作方法:
1)rosbag record -a -O cmd_record
2)记录一段bag后,关闭小海龟,重新启动小海龟仿真器节点
3)rosbag play cmd_record.bag
'-a':保存所有数据
'-O':保存为一个压缩包在当前路径
三、创建工作空间:
(1)创建工作空间的步骤:
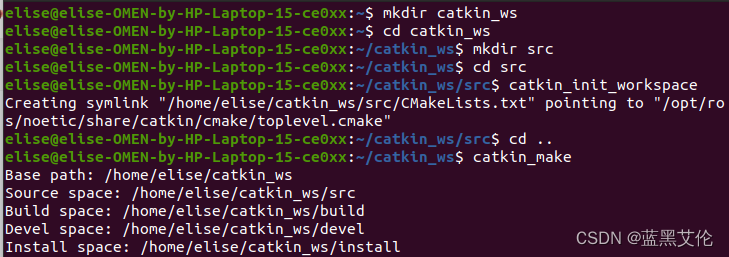
1)在主空间创建一个文件夹catkin_ws:
mkdir catkin_ws
2)进入文件夹catkin_ws:
cd catkin_ws
3)创建src文件夹(名称不可以改):
mkdir src
4)进入src文件夹:
cd src
5)初始化为ROS工作空间:
catkin_init_workspace
6)返回上一级目录:
cd ..
7)编译工作空间:
catkin_make
8)生成install安装空间:
catkin_make install

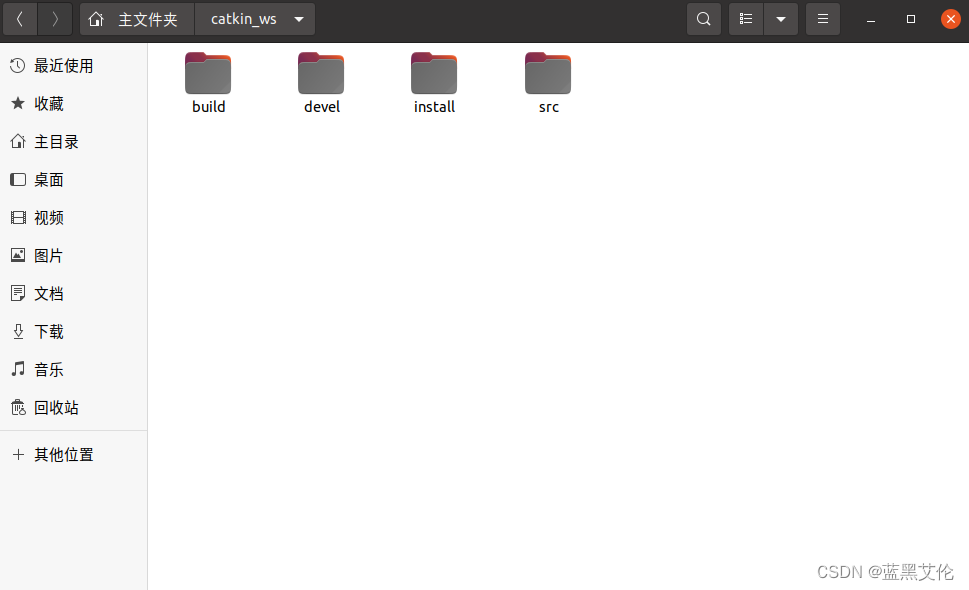
(2)生成的工作空间目录如下:
四、创建功能包:
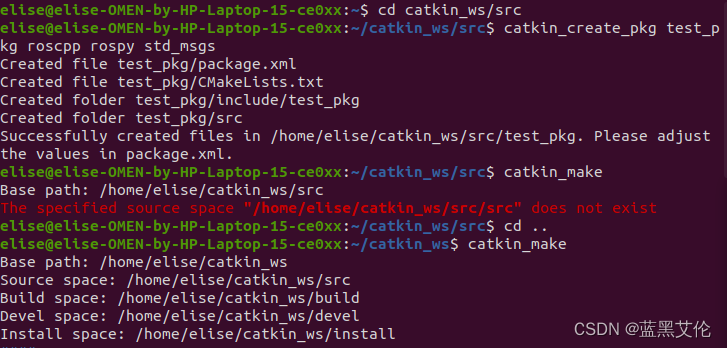
(1)在src文件夹中创建功能包:
catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
(2)编译功能包:
catkin_make
(3)设置环境变量:
source devel/setup.bash
可在主目录下的隐藏文件.bashrc(ctrl+H可显示)中添加设置环境变量语句
source [工作空间所在路径]/devel/setup.bash
设置后不再需要设置环境变量语句
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)