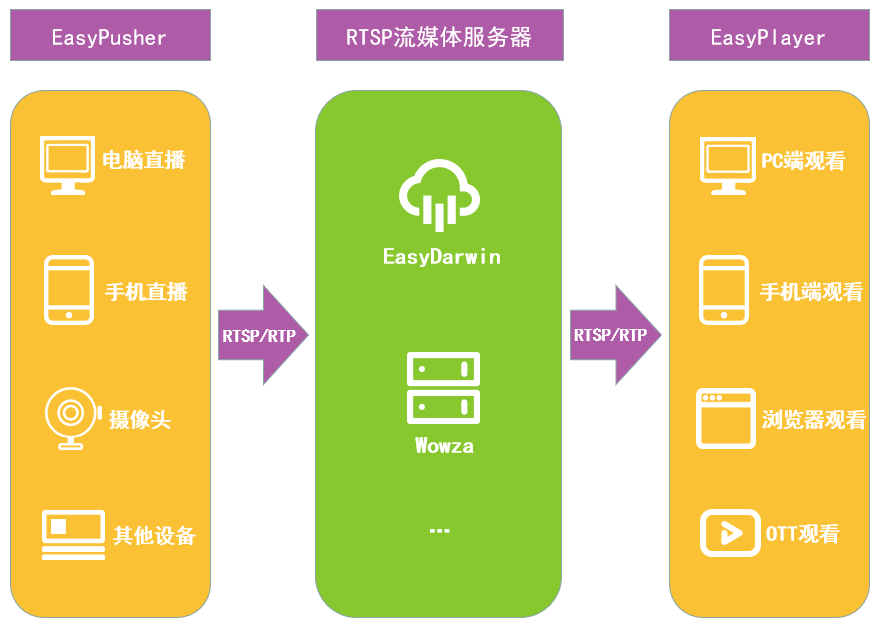
EasyPlayer是可支持H.264/H.265视频播放的流媒体播放器,性能稳定、播放流畅,可支持的视频流格式有RTSP、RTMP、HLS、FLV、WebRTC等,具备较高的可用性。EasyPlayer具备多个版本,可满足用户的多场景需求,如EasyPlayer-RTSP、EasyPlayer.js、EasyPlayerPro等,并且还拥有Windows、Android、iOS版本,EasyPlayer.js还可支持Linux平台。
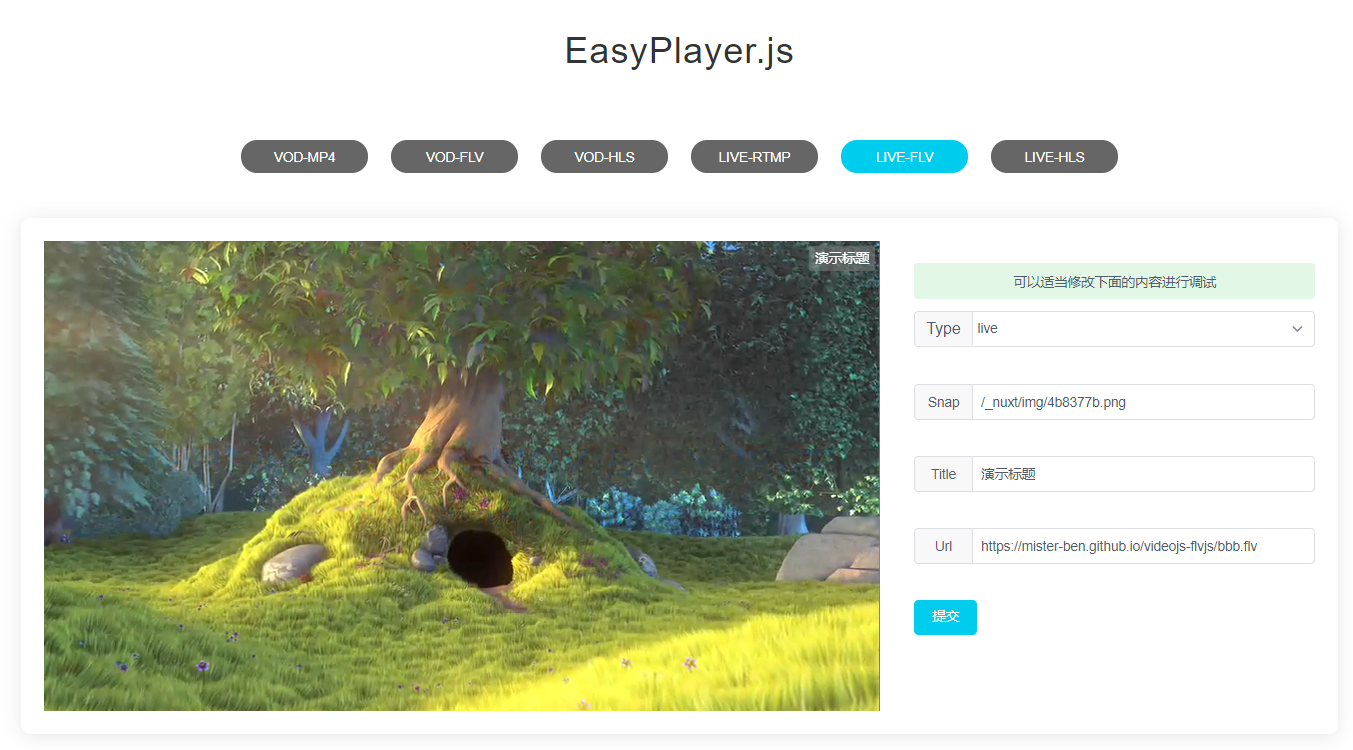
用户在使用EasyPlayer.js时,表示想在自己的代码逻辑中控制一些相关的属性。今天我们就做一个汇总分享给大家。感兴趣的用户可以参照以下方法。
1)如何使用播放的属性并动态设置:
let player = document.getElementById('player'); // 获取播放器DOM
let onPlay = document.getElementById('onPlay');
// 播放
onPlay.onclick = function(){
player.setAttribute('live', true); // 设为直播
player.setAttribute('video-url', value.value||"") // 设置播放地址
}
属性详情如下:

2)在业务中如何调用方法:
let player = document.getElementById('player') // 获取播放器DOM
let onPlay = document.getElementById('onPlay');
let onInit = document.getElementById('init');
let strPlayer = player.getVueInstance() // 获取方法集
// 播放
onPlay.onclick = function(){
player.setAttribute('video-url', value.value||"")
}
// 初始化
onInit.onclick = function(){
player.initPlayer()
}
属性详情如下:
3)如何在业务中监听播放器相关回调事件:
let player = document.getElementById('player') // 获取播放器DOM
let onPlay = document.getElementById('onPlay');
// 播放
onPlay.onclick = function(){
player.setAttribute('video-url', value.value||"")
}
player.addEventListener("error", (e) => {// 监听错误的回调事件
console.log("error:", e);
})
回调事件详情如下:

EasyPlayer播放器系列功能控制灵活、低延迟、高稳定,已经成熟运用于多个项目场景当中,并且还支持大码率视频直播(注:H.265编码格式不支持大码率视频直播),用户可以根据自身的需求对其进行二次开发或自主集成。感兴趣的用户可以前去体验和测试,欢迎大家和我们交流技术。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)