目前,GNSSj接收机约99%的时间都用作RTK模式进行测量,只有1%的时间用作静态测量做控制网等。所以,大部分人都习惯把GNSS接收机喊成RTK了。
不过除去GNSS接收机,你知道RTK是什么意思吗?
1定位
在说RTK之前,大家首先要认识这个词的含义——卫星定位,是一种使用卫星对某物进行准确定位的技术。
而卫星定位技术的应用,从早先的子午卫星系统发展到现在大家所熟知的全球定位系统和区域定位系统,发展十分迅速。

那么你知道是如何通过卫星知道你的位置的吗?
以美国的GPS系统为例,我们看一看GPS卫星定位基本原理:测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。又因为需要计算三维位置及偏差,所以需要至少4颗卫星。(你要是使用测量时,只能搜到3颗卫星,是绝对不可能固定的。)
这里面最重要的就是测量出卫星与用户接收机之间的距离,怎么测呢?先说一个基本的数学原理:距离 = 速度 X 时间。
卫星定位技术也是如此,简答来说就是卫星在太空中给用户发信号,经过时间N后,用户在地球上接到了卫星信号。用时间N乘以光速就得到了卫星和用户之间的距离。
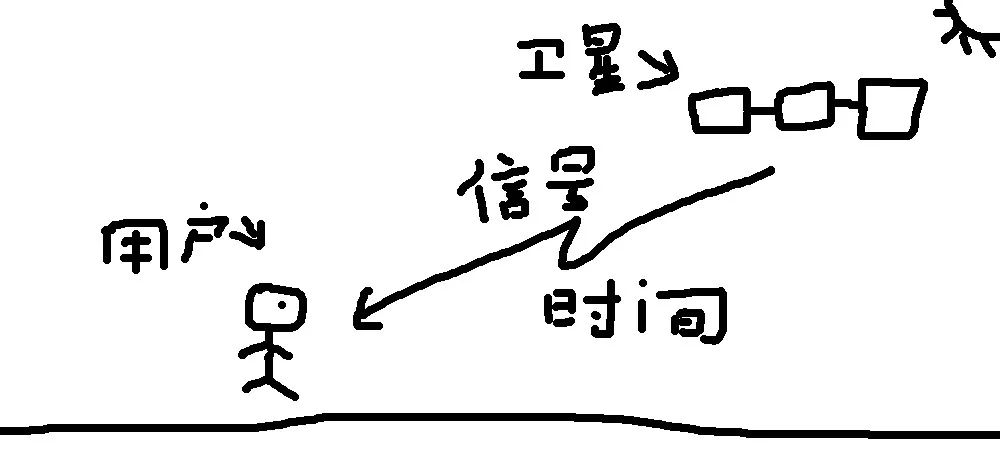
卫星的位置可在卫星星历中得到,已知卫星的位置和卫星至用户的距离,从而求得用户的地理位置信息。
由于大气层电离层的干扰,这一距离并不是用户与卫星之间的真实距离,而是伪距。我们把这种测量方法叫伪距测量。因为定位精度原因,又开发出了载波相位测量。
对于卫星定位的干扰当然不仅仅只是大气层电离层干扰,还包括钟误差、星历误差等等,想要详细了解得,参考小编之前的文章《了解一下GPS定位中的误差源及削弱方法》。
好了,关于定位就说到这里,接下来就和小编一起认识一下RTK技术。
首先,大家要认识RTK的基本概念,RTK是英文Real - time kinematic的缩写,中文意思是实时动态。RTK是一种卫星导航技术,用于提高从基于全球卫星导航系统(GPS/BeiDou/Galileo/Glonass)获得的定位数据的精度。
那么,RTK的概念是什么呢?它是一种利用GPS载波相位观测值进行实时动态相对定位的技术,它能够实时地提供测站点在指定坐标系中的三维定位结果。在使用RTK测量时......
等等,载波是什么意思?有人可能不懂是什么意思,小编来简单的为大家解释一下。
2载波相位
载波载波,根据名字就能大致了解它的含义,载是运载的意思,波就是电波的意思,当然这里要运载的是卫星的信号,合在一起就是可运载调制信号的高频率震荡波,称之为载波。
以GPS系统为例,GPS卫星发射的信号由载波、测距码和导航电文三部分组成(不要问小编为什么是这三个组成)。载波和测距码用来进行距离测量,导航电文包含了卫星星历、卫星钟的改正参数
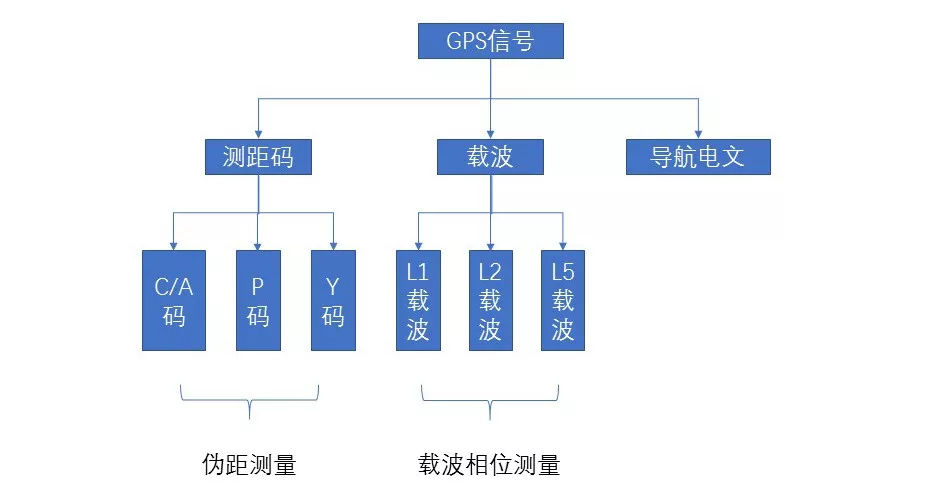
在GPS建成之初,是通过伪距测量来进行定位的,因为精度低的原因(C/A码的测距精度只能达到2.93m),后来人们在20世纪90年代中期开发基于GPS测量(或更一般地,基于GNSS测量)的实时厘米级精度定位,也就是现在的RTK(“实时动态”)定位。
好奇为什么伪距测量比载波相位的精度低吗?
因为码元宽度和波长,伪距测量是以测距码作为量测信号的,而采用码相关法时,测量精度是码元宽度的百分之一,由于测距码的码元宽度较大(精码码宽30m,C/A码码宽300m),所以导致测量精度不高。
码宽计算:码宽=光速+码频率,光速为3 x 108, C/A码的码频率为1.023Mhz(1 x 106) ,精码的码频率为10.23Mhz(1x 10)。
而载波的波长则要短上很多( 19.0cm/24.4cm/25.5cm) ,把载波当做测距信号进行相位测量,就能达到很高的精度。
说到这,小编突然想到一件事情,载波之前作为运载卫星信号的载体(苦力劳动),而测距码也包含在卫星信号里,说明载波是给测距码当运输工具的,突然发现作为运输工具的载波的精度要比测距码还要高,大起大落。

但是使用载波时也不是都是好的,也有缺点。例如会出现周跳与整周模糊度的问题,小编为大家解释一下两个词。
首先,周跳,是因为由于卫星信号的失锁而导致的整周计数的跳变或中断,导致观测值不精确。
整周模糊度是因为载波是一个没有任何标记的余弦波,接收机内的鉴相器只能测定不足一周的部分,对产生的整周数不确定。这个问题就需要考验看各厂商的测量软件对整周技术的计算能力了。
接着我们看一下载波相位测量的原理是,先看一下公式
ρ=λ(φs -φR)
是卫星到地球的距离,也叫卫地距,为载波的波长,(φs -φR)为相位差,这里的相位差包含着不足一周的小数部分,也包含着整周波段数。
所以载波相位测量实际就是以波长λ作为长度单位,以载波作为一把“尺子”来测量卫星至接收机间的距离。
3RTK
载波说完了,接着说RTK,RTK是一种利用GPS载波相位观测值进行实时动态相对定位的技术,关键词:实时、动态和相对定位。
以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK是能够在野外实时得到厘米级定位精度的测量方法,极大地提高了作业效率。
RTK的工作原理是基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果。
所以RTK测量至少需要2台GPS接收机(一台作为基准站一台或多台作为移动站)、数据通信链(电台等)和测量软件。
上面小编说的是传统RTK,传统RTK也有一个缺陷,就是GPS误差会随参考站和移动站距离的增加而逐渐失去线性,在较长距离下(单频>10km,双频>30km),经过差分处理后的用户数据仍然含有很大的观测误差,从而导致定位精度的降低和无法解算载波相位的整周模糊。
所以在20世纪90年代中期,人们提出了网络RTK技术。通过多个参考站组成的GPS网络来估计一个地区的GPS误差模型,并为网络覆盖地区的用户提供校正数据,用一个虚拟参考站的数据,为用户提供距离自己位置较近的某个参考网格的校正数据,因此网络RTK技术又被称为虚拟参考站技术(Virtual Reference)。
近些年随着技术的发展,RTK技术早已由传统的1+1或1+2发展到了广域差分系统WADGPS,有些城市建立起CORS系统,有的公司也自己建立了CORS系统,例如千寻CORS,这就大大提高了RTK的测量范围,解决了传统RTK距离限制的问题。
总结
RTK是一种利用GPS载波相位观测值进行实时动态相对定位的技术,载波虽然测量精度高,但是也会出现周跳及整周模糊度的问题。
RTK的发展由传统RTK到网络RTK再到现在的CORS,测量越来越方便精度也更加精确。
RTK技术的关键在于数据处理技术和数据传输技术,RTK定位时要求基准站接收机实时地把观测数据(伪距观测值,相位观测值)及已知数据传输给流动站接收机,数据量比较大。
RTK数据的传输也由电台传输发展到现在的GPRS和GSM网络传输,大大提高了数据的传输效率和范围。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)