<span style="font-family: Arial, Helvetica, sans-serif; background-color: rgb(255, 255, 255);">Pixhawk_nuttx启动过程</span>
所有内容均来自网络,结合自己查看代码加上的注释,不对之处请指出;
QQ:4862879
通过系统在编译生成的 elf 文件 我们可以查看到nuttx 的文件头中可以找到这个程序入口点的地址0x80003d1;
根据 cortex-m3 的定义,系统从 flash 启动时,0x08000004中的值就是 PC(程序计数器)的初始值,这才是真正起作用的,它决定了处理器执行的第一条指令。
nuttx.S文件中关于启动地址的说明:
8000004: 080003d1 .word 0x080003d1 <---PC 初始值
080003d0 <__start>:
80003d0: b510 push {r4, lr} <---处理器执行的第一条指令
启动代码文件:PX4NuttX/nuttx/arch/arm/src/stm32/stm32_start.c
1. __start-- #处理器执行的第一条指令 (px4使用的是stm32,入口在stm32_start.c中)
2. |
3. v
4. stm32_clockconfig()------ #初始化时钟 80003d2: f000 f827 bl 8000424
5. |
6. v
7. rcc_reset() #复位rcc
8. stm32_stdclockconfig() #初始化标准时钟
9. rcc_enableperipherals() #使能外设时钟
10. |
11. --------------------
12. |
13. v
14. stm32_fpuconfig() #配置fpu,
15. stm32_lowsetup() #基本初始化串口,之后可以使用up_lowputc()
16. stm32_gpioinit() #初始化gpio,只是调用stm32_gpioremap()设置重映射
17. up_earlyserialinit() #初始化串口,之后可以使用up_putc()
18. stm32_boardinitialize()-- #板级初始化
19. |
20. v
21. stm32_spiinitialize() #初始化spi,只是调用stm32_configgpio()设置gpio
22. stm32_usbinitialize() #初始化usb,只是调用stm32_configgpio()设置gpio
23. board_led_initialize() #初始化led,只是调用stm32_configgpio()设置gpio
24. |
25. --------------------
26. |
27. v
28. os_start()-------------#初始化操作系统 ardupilot\modules\PX4NuttX\nuttx\sched\os_start.c
29. |
30. v
31. dq_init() #初始化各种状态的任务列表(置为null)
32. g_pidhash[i]= #初始化唯一可以确定的元素--进程ID
33. g_pidhash[PIDHASH(0)]= #分配空闲任务的进程ID为0
34. g_idletcb= #初始化空闲任务的任务控制块
35. sem_initialize()-- #初始化信号量
36. |
37. v
38. dq_init() #将信号量队列置为null
39. sem_initholders() #初始化持有者结构以支持优先级继承,
40. |
41. --------
42. |
43. v
44. up_allocate_heap() #分配用户模式的堆(设置堆的起点和大小)
45. kumm_initialize() #初始化用户模式的堆
46. up_allocate_kheap() #分配内核模式的堆,
47. kmm_initialize() #初始化内核模式的堆,
48. task_initialize() #初始化任务数据结构,
49. irq_initialize() #将所有中断向量都指向同一个异常中断处理程序
50. wd_initialize() #初始化看门狗数据结构
51. clock_initialize() #初始化rtc
52. timer_initialize() #配置POSIX定时器
53. sig_initialize() #初始化信号
54. mq_initialize() #初始化命名消息队列
55. pthread_initialize() #初始化线程特定的数据,空函数
56. fs_initialize()--- #初始化文件系统
57. |
58. v
59. sem_init() #初始化节点信号量为1
60. files_initialize() #初始化文件数组,空函数
61. |
62. --------
63. |
64. v
65. net_initialize()-- #初始化网络
66. |
67. v
68. uip_initialize() #初始化uIP层
69. net_initroute() #初始化路由表,
70. netdev_seminit() #初始化网络设备信号量
71. arptimer_init() #初始化ARP定时器
72. |
73. --------
74. |
75. v
76. up_initialize()--- #处理器特定的初始化
77. |
78. v
79. up_calibratedelay()#校准定时器
80. up_addregion() #增加额外的内存段
81. up_irqinitialize() #设置中断优先级,关联硬件异常处理函数
82. up_pminitialize() #初始化电源管理,
83. up_dmainitialize() #初始化DMA,
84. up_timerinit() #初始化定时器中断
85. devnull_register() #注册/dev/null
86. devzero_register() #注册/dev/zero,
87. up_serialinit() #注册串口控制台/dev/console和串口/dev/ttyS0
88. up_rnginitialize() #初始化并注册随机数生成器
89. up_netinitialize() #初始化网络,是arch/arm/src/chip/stm32_eth.c中的
90. up_usbinitialize() #初始化usb驱动,
91. board_led_on() #打开中断使能led,
92. |
93. --------
94. |
95. v
96. lib_initialize() #初始化c库,空函数
97. group_allocate() #分配空闲组
98. group_setupidlefiles() #在空闲任务上创建stdout、stderr、stdin
99. group_initialize() #完全初始化空闲组
100. os_bringup()------ #创建初始任务 os_bringup.c
101. |
102. v
103. KEKERNEL_THREAD() #启动内核工作者线程
104. board_initialize() #最后一刻的板级初始化,nsh未调用
105. TASK_CREATE() #启动默认应用程序 os_bringup.c
106. |
107. --------
108. |
109. v
110. for up_idle() #空闲任务循环
111. |
112. --------------------
113. |
114. v
115. for(;;)
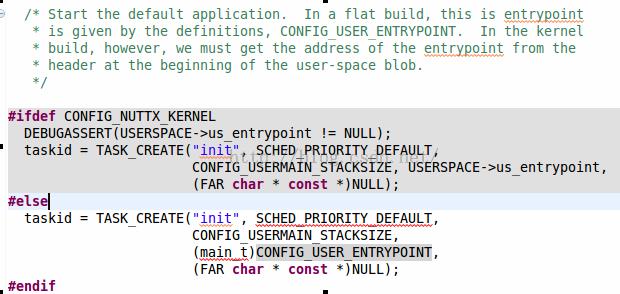
TASK_CREATE()这里是启动默认的应用程序,入口点由CONFIG_USER_ENTRYPOINT给出
TASK_CREATE()启动Nsh终端程序, nsh_script.c文件中的 nsh_initscript
NSH.h中NSH_INITPATH文件为RCS文件路径, 开始执行rcS脚本文件.
进入控制台程序,也就是nsh_consolemain()函数。在这里实际上nsh_initscript和nsh_session都会去执行命令,但是前者是执行启动脚本也就是rcS,后者是执行用户程序。
当系统启动NSH之后,系统就算是正常启动起来了,之后NSH通过脚本启动PX4代码或Ardupilot代码;
Ardupilot的启动脚本:
rcS: Nuttx系统默认的启动脚本,
Ardupilot代码中用来加载LED灯,SD卡,USB连接,最后加载Ardupilot的启动文件rc.APM;
rc.APM:
创建SD卡中的APM目录,
加载binfs,
检测硬件版本V1,V2,V4,
启动Uorb,
检测PX4IO板,并BIN的更新,
加载各种传感器,hmc5883,mpu6000,空速,声纳,光流,PWM输入,指示灯,smbus电池检测,IR;
最后启用Ardupilot启动飞控代码, Ardupilot内嵌程序,Builtin_Commandes.c中有定义.
echo Starting ArduPilot $deviceA $deviceC $deviceD
if ArduPilot -d $deviceA -d2 $deviceC -d3 $deviceD start
then
echo ArduPilot started OK;启动Ardupilot飞控代码,
else
sh /etc/init.d/rc.error
fi
echo "rc.APM finished"
APM启动成功
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)