基于ROS+Gazebo环境,用roslaunch把sdf模型加载到gazebo仿真世界。目录结构如下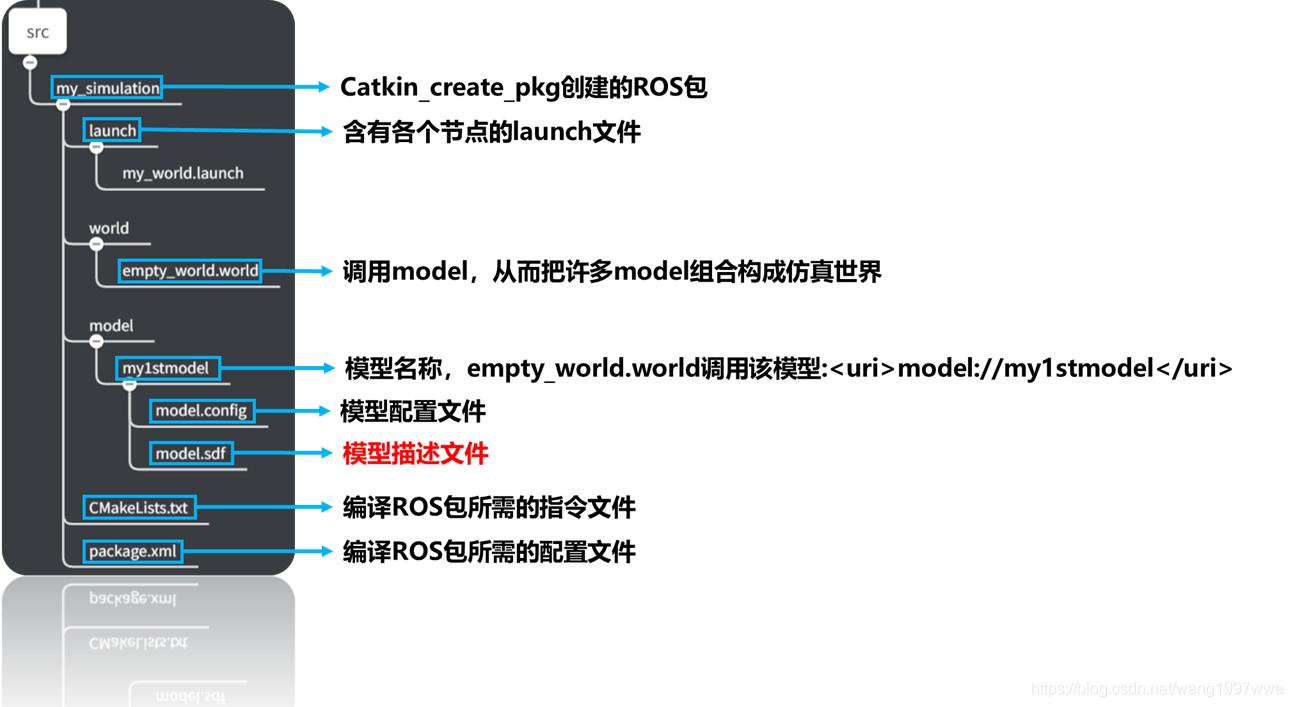
输入命令roslaunch my_simulation my_world.launch
报错:
1.不接入网络情况下会输出Unable to find uri[model://my1stmodel]
2.接入网络后,如果找不到该模型,会联网在Gazebo远程模型数据库中寻找,由于自己创建的模型名称,在Gazebo模型数据库中是不存在的,所以会一直停在命令行waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, watting...
报错原因:没有把ros包my_simulation下的model文件夹添加到GAZEBO_MODEL_PATH环境变量中
解决方案:export GAZEBO_MODEL_PATH=${GAZEBO_MODEL_PATH}:path-to-model
(其中,path-to-model就是ros包下的model文件夹的绝对路径)
结果:成功把my1stmodel加载到gazebo
参考资料:
1.模型加载教程:https://www.theconstructsim.com/gazebo-5-minutes-004-create-gazebo-model-using-sdf
注意,该教程存在两个问题:1.本文所提到的,没有把model文件夹加入到GAZEBO_MODEL_PATH中;
2.sdf文件单词书写有误,把里面的两个<\gox>改为<\box>即可)
2.报错处理教程:https://github.com/PX4/avoidance/issues/262
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)