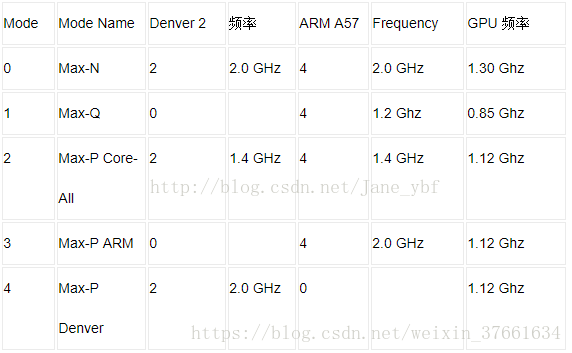
Jetson TX2 工作模式及相应的CPU和GPU频率:
上电的时候,默认最低功耗模式1,风扇不转
1、直接运行home下的jetson_clocks.sh,开启最大频率
sudo ~/jetson_clocks.sh
然后小风扇就呼啦啦转起来啦
2、查询当前工作模式,输入
sudo nvpmodel -q verbose
此时显示的是
NV Power Mode: MAX-P ARM
3、修改工作模式为0,输入:
sudo nvpmodel -m 0
再次查询,显示
NV Power Mode: MAXN
0
工作模式修改成功
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)