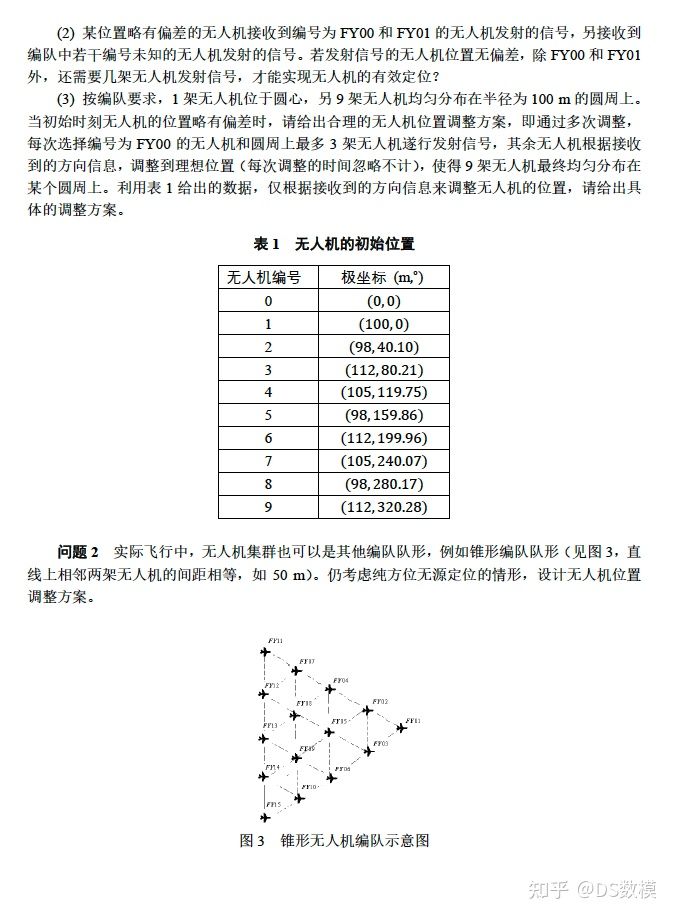
1.比赛报名与思路解析(持续更新750967193)
2.比赛时间:2022年9月15日18点到2022年9月18日20点
如下为B题思路:
先贴题目:

如下是初步分析:
无人机的问题属于近年来的热点问题,以往多为调度问题,此次属于涉及到无人机的定位,在简单定位模型建立的基础上,应该考虑无人机偏差的情况,针对出现的偏差如何进行优化。B题的整体分析如下:
问题1的第(1)问,相当于已经确定1架无人机的位置,另外2架无人机的位置,应该考虑不同无人机位置组合的情况,建立基本的数学模型;问题1的第(2)问,相当于已经知道2架无人机的位置,问还需要几架无人机发射信号,才能实现无人机的有效定位,属于优化类问题,依然建议考虑不同情形,针对不同情况进行模型建立;问题1的第(3)问,类似调度问题,这一小问是在第1、第2问基础上的又一深化,将是B题的核心问题之一,严格来说也属于调度类问题。问题2是在问题1的基础上进行拓展,需要针对不同队形进行调整。如果有相关专业的同学,能够进行模拟仿真,效果是最好的,但是不是也没有关系,也可以做。
针对具体的问题,分析如下:
问题1:
(1)如图1所示,无人机对位置的确定,主要是依据角度。轨迹外围有9架无人机,根据FY00和另外2架无人机进行定位,首先要明确有多少种情形,如图2所示,一共有4种情形,然后再结合无人机的相对位置,相对位置的变化也需要考虑,之后应该针对每一种情形进行模型的建立与求解,定位的原则就是角度一定。也可以先建立一个测量模型,然后改变参数进行分析。

图1 无人机位置确定示意图

图2 无人机位置确定示意图
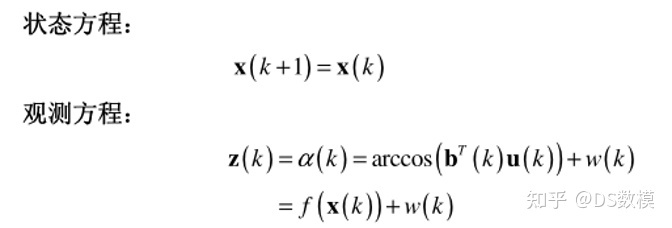
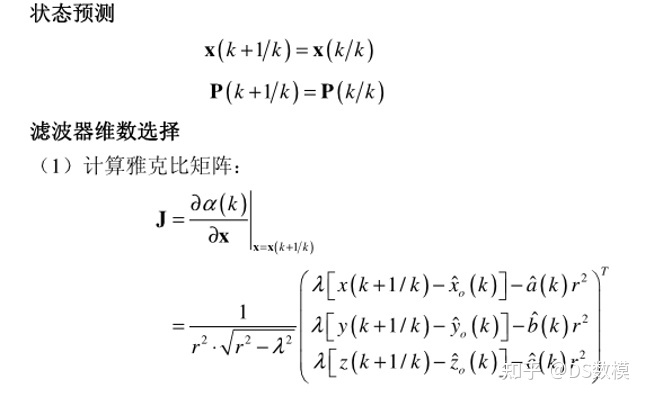
(2)问题(2)是问题(1)基础上的深化,应该在问题(1)的基础上进行优化,毋庸置疑,2架是肯定不行的,在某些特定的位置,三架也不见得可以。这一问一定要谨记问题大背景—要求尽可能少发送电磁波信号,因此类似优化问题,在问题一模型的基础上进行优化即可。另外,针对这一问,可以结合题目之间的联系,灵活应对。以下给出自适应变维算法的推导,可以参考,结合问题实际,建立基础模型,之后在此基础上改进,分析结果,进行改进。

这是一些其他的想法和思路:B题是无人机位置偏移的矫正问题,假设同一高度,只需要两个无人机就可以进行矫正了,矫正可以通过角度和距离进行调整,模型可以通过通过勾股定理来建立求解。拿表1的数据首先来拟合出一个标准圆来,用于位置的偏差计算(偏差距离,偏差角度), 半径R已知了,就可以调节距离。
关于有效调整,只要有两个无人机就可以有效调整,只是如果两个负责发射信号的无人机与一个接收信号的无人机共线了,虽然是可以调整, 但是从实际层面来讲效果是比较差的。可以设置一定的惩罚,比如说角度越小,惩罚值越大,已经矫正了无人机归纳入可用于发射信号的无人机集合中,怎么追求整体的惩罚值最小,那么矫正优先顺序也有讲究,那么也可以作为一个寻优的点。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)