很多人不理解OPTICS算法绘出的图该怎么理解。为什么波谷就算一类,有个波峰又算另一类了,本篇在第三部分的第2、3节详细讲这个是什么判别分类的。
本篇会添加一些个人思考过程,可能有不严谨的地方,希望在评论区讨论指正。
另外,学习本篇,需要有DBSCAN的基础。如果没基础可以先看看这篇《详解DBSCAN聚类》
一、OPTICS重要的新定义
在DBSCAN的基础上,给定
M
i
n
P
t
s
MinPts
MinPts 和
e
p
s
eps
eps 后,OPTICS又提出了下面几个新定义:
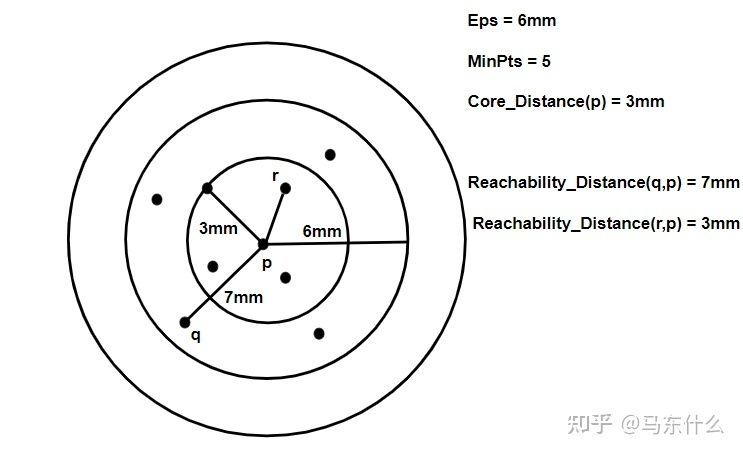
(1)核心距离coreDist:当前核心点
p
p
p 的邻域中,与核心点
p
p
p 距离升序排第
M
i
n
P
t
s
−
1
MinPts - 1
MinPts−1位的样本点,与
p
p
p 的距离作为
p
p
p 的核心距离(-1是因为邻域包含了p本身)

这里
N
(
p
)
N(p)
N(p)指的是p的邻域点数。
个人理解:因为OPTICS一开始会设定
e
p
s
=
i
n
f
eps=inf
eps=inf,所以所有点都是核心点,所以
c
o
r
e
D
i
s
t
(
p
)
coreDist(p)
coreDist(p)的计算也不需要区分条件
N
(
p
)
<
M
i
n
P
t
s
N(p) < MinPts
N(p)<MinPts,除非你数据集的总样本量 <
M
i
n
P
t
s
MinPts
MinPts
(2)可达距离reach_dist:当前核心点
p
p
p 下,其他样本点
i
i
i 到
p
p
p 的可达距离为
m
a
x
(
i
与
p
间的距离
,
p
的核心距离
)
max(i与p间的距离, p的核心距离)
max(i与p间的距离,p的核心距离)

个人理解:同(1)
两种距离的举例如下图所示,图片来自知乎@马东什么,我觉得非常的直观
二、算法流程
为了更好理解一点,我将通过接近python的伪代码+中文描述来写流程
1、初始化:
给定邻域最小样本量MinPts, 数据集D
eps = inf
processed_list = np.full(shape=(len(D),), fill_value=0)
distMat = np.zeros((len(D), len(D)))
reach_dist = np.full(shape=(len(D),), fill_value=inf)
order_list = []
2、算法流程(经典)
计算样本点两两距离,填值到distMat
计算每个样本点(不止核心点)的核心距离temp_core_dist,方法是取distMat每一列升序第MinPts的值
计算temp_core_dist中核心距离 < eps的样本,作为核心点集合core_points,及其核心距离core_dist
相信你已经发现了,因为初始eps是inf,所以其实每个样本点都是核心点,所以core_dist = temp_core_dist
for p in core_points:
if processed_list[p] == 1:
continue
Neighbors_points = getNeighbors(p, eps)
processed_list[p] = 1
ordered_list.append(p)
if Neighbors_points.num > MinPts:
Seeds = {}
for neigbor in Neighbor_points:
if processed_list[neighbor] == 1:
continue
reach_dist[neighbor] = \
min(max(distMat[neighbor,p],core_dist[p]), reach_dist[neighbor])
Seeds.update({neighbor:reach_dist[neighbor]})
while len(Seeds)!=0:
q = sorted(Seeds.items(), key=operator.itemgetter(1))[0][0]
del Seeds[q]
processed_list[q] = 1
ordered_list.append(q)
Neighbors_of_q = getNeighbors(q, eps)
if Neighbor_of_q.num > MinPts:
for neigbor in Neighbor_of_q:
if processed_list[neighbor] == 1:
continue
reach_dist[neighbor] = \
min(max(distMat[neighbor,q],core_dist[q]), reach_dist[neighbor])
Seeds.update({neighbor:reach_dist[neighbor]})
好了,上面是参考很多博文,他们的代码,可以看出很多判断语句是必然满足的,循环也是只会运行一次,很多冗余,所以我按照自己的理解精简了代码,如下。
3、算法流程(精简)
计算样本点两两距离,填值到distMat
全体样本点作为核心点集合core_points
计算每个样本点的核心距离core_dist,方法是取distMat每一列升序第MinPts的值
p = core_points[0]
Neighbors_points = getNeighbors(p, eps)
processed_list[p] = 1
ordered_list.append(p)
Seeds = {}
for neigbor in Neighbor_points:
if processed_list[neighbor] == 1:
continue
reach_dist[neighbor] = \
min(max(distMat[neighbor,p],core_dist[p]), reach_dist[neighbor])
Seeds.update({neighbor:reach_dist[neighbor]})
while len(Seeds)!=0:
q = sorted(Seeds.items(), key=operator.itemgetter(1))[0][0]
del Seeds[q]
processed_list[q] = 1
ordered_list.append(q)
Neighbors_of_q = getNeighbors(q, eps)
for neigbor in Neighbor_of_q:
if processed_list[neighbor] == 1:
continue
reach_dist[neighbor] = \
min(max(distMat[neighbor,q],core_dist[q]), reach_dist[neighbor])
Seeds.update({neighbor:reach_dist[neighbor]})
最后,给出简洁的流程,如下。
4、算法流程(最精简)
计算样本点两两距离,填值到
d
i
s
t
M
a
t
distMat
distMat
全体样本点作为核心点集合
c
o
r
e
_
p
o
i
n
t
s
core\_points
core_points
计算每个样本点的核心距离
c
o
r
e
_
d
i
s
t
core\_dist
core_dist,方法是取
d
i
s
t
M
a
t
distMat
distMat每一列升序第
M
i
n
P
t
s
MinPts
MinPts的值
数据集中随机选择一个点作为核心点
p
p
p
计算数据集中其他点
i
i
i到点
p
p
p的可达距离
r
e
a
c
h
_
d
i
s
t
[
i
]
reach\_dist[i]
reach_dist[i],以键值对{
i
i
i :
r
e
a
c
h
_
d
i
s
t
[
i
]
reach\_dist[i]
reach_dist[i]}存在字典
S
e
e
d
s
Seeds
Seeds中
OK,点
p
p
p已经用过,不再参与后续任何计算
当
S
e
e
d
s
Seeds
Seeds不空时,循环:
(1)
S
e
e
d
s
Seeds
Seeds按值升序排列,取第0个即离上一个核心点最近的点
q
q
q,作为当前核心点
(2)计算数据集中其他未处理的点
i
i
i到点
q
q
q的可达距离
r
e
a
c
h
_
d
i
s
t
[
i
]
reach\_dist[i]
reach_dist[i],取新旧中的较小值,更新到
S
e
e
d
s
Seeds
Seeds中
(3)OK,点
q
q
q已经用过,从
S
e
e
d
s
Seeds
Seeds中删除,且不再参与后续任何计算
三、一个简单的例子,讲述算法流程
1、例子来源:《机器学习笔记(十一)聚类算法OPTICS原理和实践》
已知样本数据集为:
D
=
[
1
,
2
]
,
[
2
,
5
]
,
[
8
,
7
]
,
[
3
,
6
]
,
[
8
,
8
]
,
[
7
,
3
]
,
[
4
,
5
]
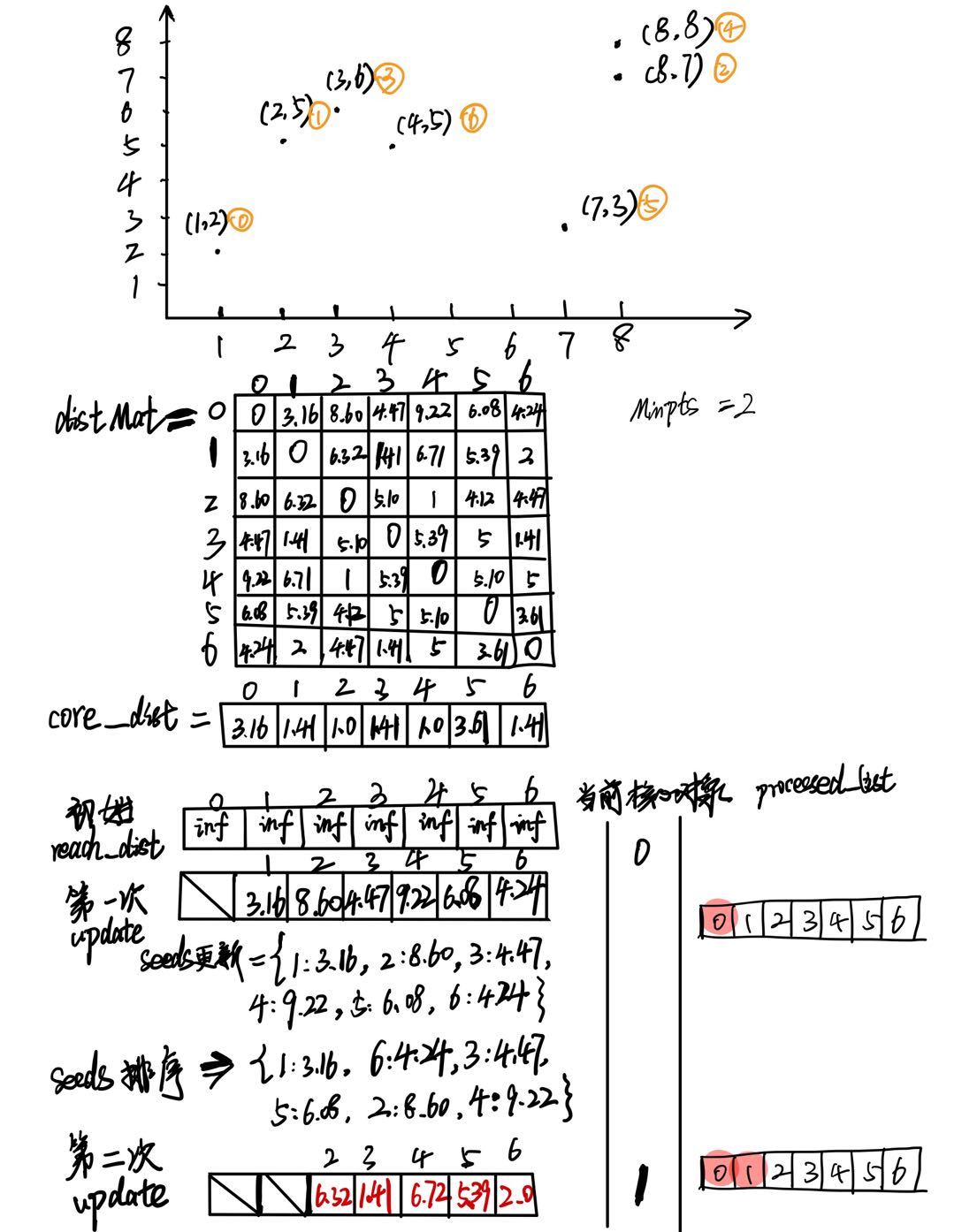
D = {[1, 2], [2, 5], [8, 7], [3, 6], [8, 8], [7, 3], [4,5]}
D=[1,2],[2,5],[8,7],[3,6],[8,8],[7,3],[4,5],坐标轴上分布如下,我已经用黄色圆圈序号标明其在样本中的索引。
设定
e
p
s
=
i
n
f
eps=inf
eps=inf,
M
i
n
P
t
s
=
2
MinPts=2
MinPts=2,
先计算了
d
i
s
t
M
a
t
distMat
distMat,
c
o
r
e
_
d
i
s
t
core\_dist
core_dist。
初始化
r
e
a
c
h
_
d
i
s
t
reach\_dist
reach_dist全
i
n
f
inf
inf,
记录了每一步处理的核心对象(核心点),并及时在
p
r
o
c
e
s
s
e
d
_
l
i
s
t
processed\_list
processed_list标记为已处理
可以看到
S
e
e
d
s
Seeds
Seeds的更新、
S
e
e
d
s
Seeds
Seeds的排序、选新的核心对象计算可达距离 是交替进行的
第一次update只是针对第一个选中的核心点,所以只有一次。
第二次update是
S
e
e
d
s
Seeds
Seeds不空的循环,会一直到结束(当
S
e
e
d
s
Seeds
Seeds为空)
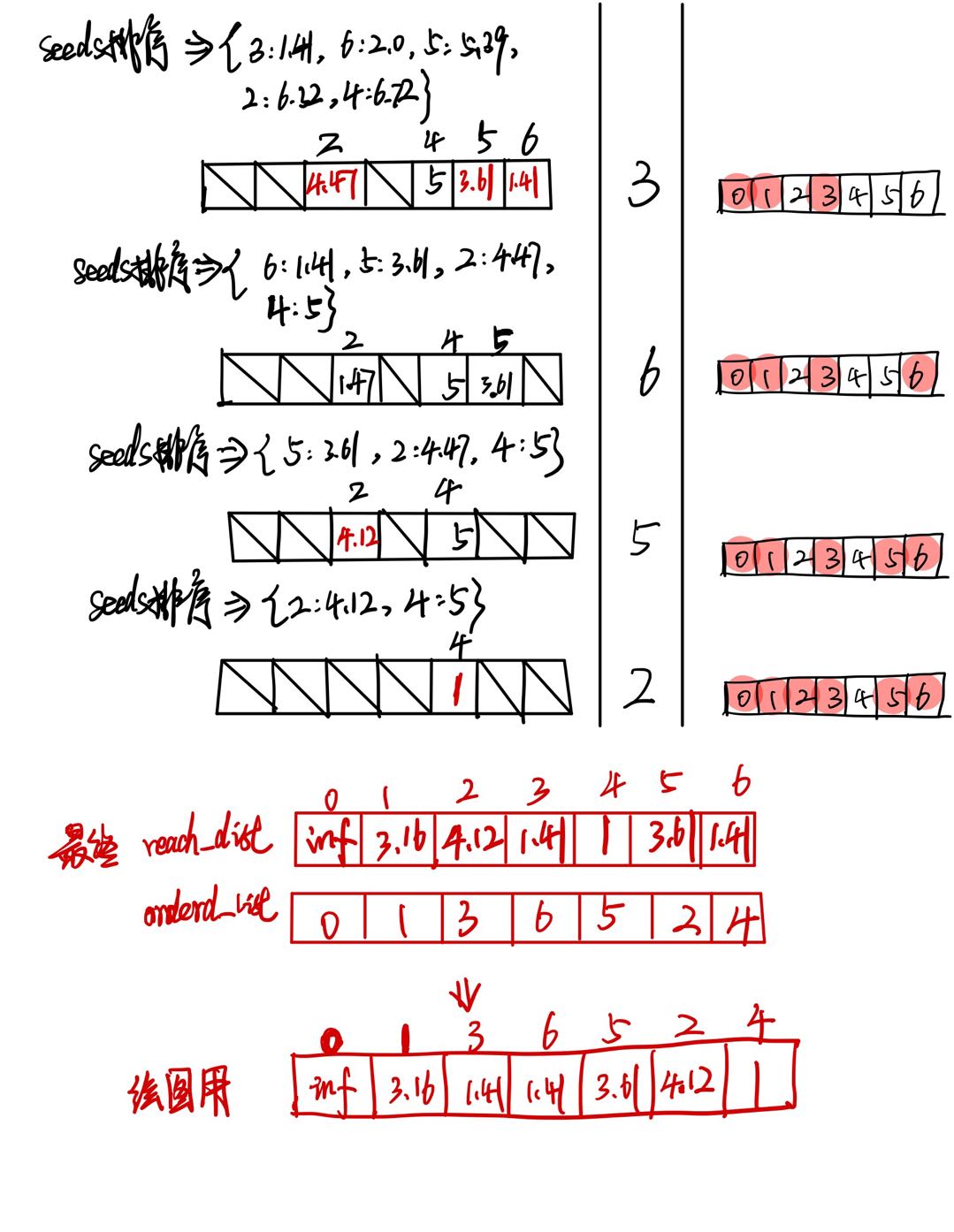
最终的
r
e
a
c
h
_
d
i
s
t
reach\_dist
reach_dist 是按照样本顺序给出的,
o
r
d
e
r
e
d
_
l
i
s
t
ordered\_list
ordered_list 是按照核心点的处理顺序的(也与可达距离有关),为了绘图,我们需要将
r
e
a
c
h
_
l
i
s
t
reach\_list
reach_list 按照
o
r
d
e
r
e
d
_
l
i
s
t
ordered\_list
ordered_list 的顺序重排列。如上图。
然后,再用这个重排列的数据绘图如下。
2、重点来了!如何理解这张
r
e
a
c
h
_
d
i
s
t
—
p
o
i
n
t
s
reach\_dist—points
reach_dist—points图并实现分类
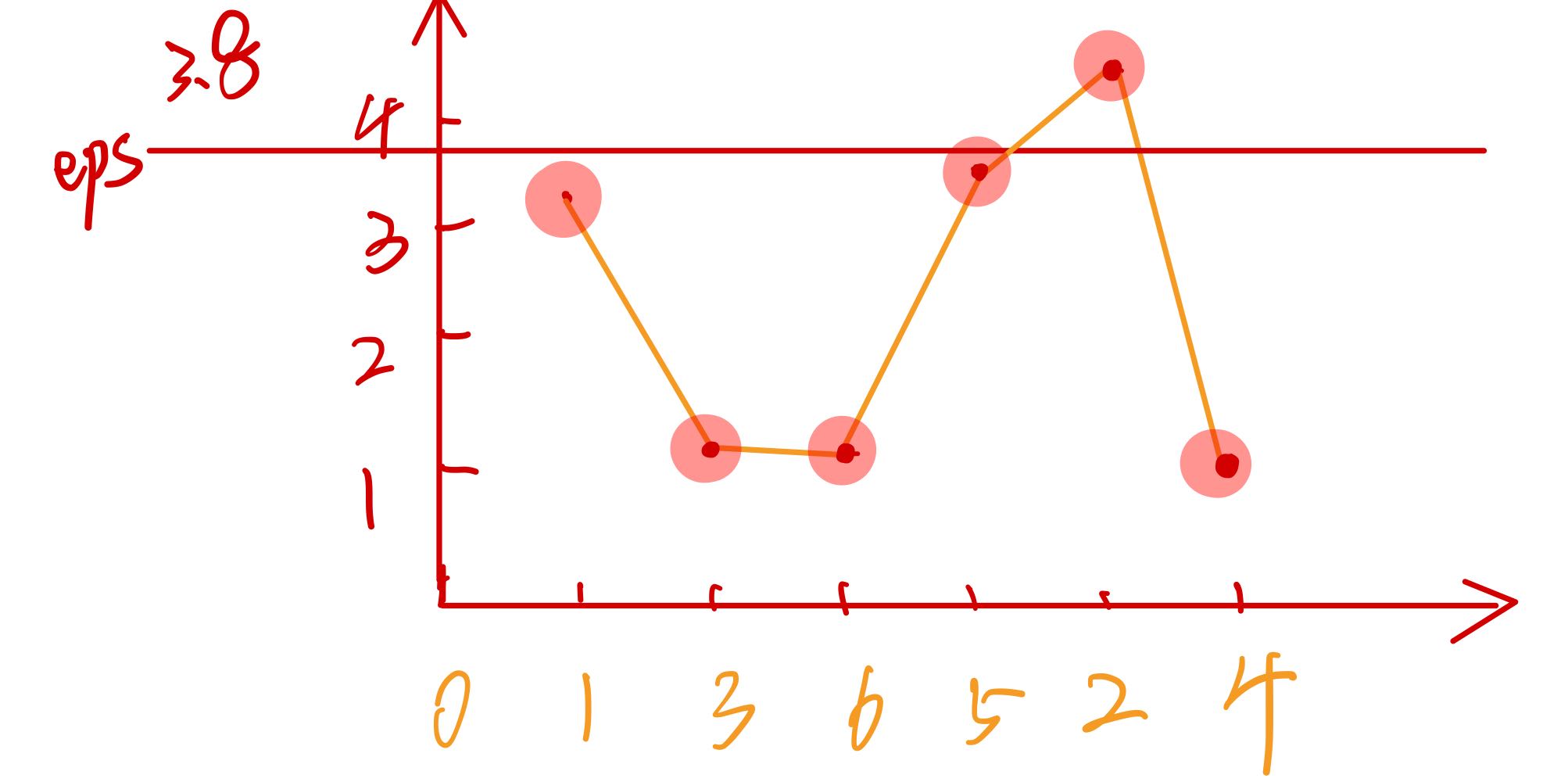
假设
e
p
s
=
3.8
eps=3.8
eps=3.8
(1)首先,样本点0,值为
i
n
f
inf
inf不用绘制出来,因为
r
e
a
c
h
_
d
i
s
t
reach\_dist
reach_dist 的原始定义其实应该是全
u
n
d
e
f
i
n
e
d
undefined
undefined 而不是
i
n
f
inf
inf,未定义的值当然不用绘制了
(2)然后,样本点1,显然离样本点0的可达距离 < eps,那么归到与样本点0一类是没有问题的
(3)然后,样本点3,显然离样本点1的可达距离 < eps,那么归到与样本点0一类是没有问题的。
如果你是这样想就错了!
只是就本例的数据集来说,确实可以看出3到1更近。
从更广义的样本来说,样本点3离样本0和1谁更近是不知道的,即
r
e
a
c
h
_
d
i
s
t
(
3
,
0
)
reach\_dist(3,0)
reach_dist(3,0)与
r
e
a
c
h
_
d
i
s
t
(
3
,
1
)
reach\_dist(3,1)
reach_dist(3,1)谁小不知道,可以举例为:
样本点1到核心点0的
r
e
a
c
h
_
d
i
s
t
(
1
,
0
)
=
3.16
reach\_dist(1,0) = 3.16
reach_dist(1,0)=3.16 <
样本点3到核心点0的
r
e
a
c
h
_
d
i
s
t
(
3
,
0
)
=
3.3
reach\_dist(3,0) = 3.3
reach_dist(3,0)=3.3 <
样本点3到核心点1的
r
e
a
c
h
_
d
i
s
t
(
3
,
1
)
=
3.5
reach\_dist(3,1) = 3.5
reach_dist(3,1)=3.5
这样的话就是样本点3到核心点0的距离更近,也满足这样的
o
r
d
e
r
e
d
_
l
i
s
t
ordered\_list
ordered_list 顺序0->1->3
所以:我们可以发现这样的一个规律:
1与前面的集合{0}中的某点可达距离最近为3.16
3与前面的集合{0,1}中的某点可达距离最近为1.41
6与前面的集合{0,1,3}中的某点可达距离最近为1.41
5与前面的集合{0,1,3,6}中的某点可达距离最近为3.61
(4)对于样本点2,为什么就要归入第二类呢?因为
2与前面的集合{0,1,3,6,5}中的某点可达距离最近为4.12 > eps,所以分在第一类已经不合适了,又因为核心距离
c
o
r
e
_
d
i
s
t
[
2
]
=
1.0
<
e
p
s
core\_dist[2]=1.0<eps
core_dist[2]=1.0<eps,所以归入第二类
(5)对于样本点4,可达距离小于eps,为什么也要归入第二类呢?因为
4与前面的集合{0,1,3,6,5,2}中的某点可达距离最近为1,
但是显然,样本点4不能与前面{0,1,3,6,5}的可达距离,必然比样本点2与前面的可达距离还要远(否则在
o
r
d
e
r
_
l
i
s
t
order\_list
order_list 中样本点4应该排在2前面)
4与前面的集合中的可达距离最近为1,还得是靠样本点2才能这么小。所以样本点4与归入2所在的第二类。
3、总结一下根据
r
e
a
c
h
_
d
i
s
t
—
p
o
i
n
t
s
reach\_dist—points
reach_dist—points图如何定义簇
(可惜上面的例子没有噪声点样本。)
注意此时eps已不再是inf,而是依据图自定义的。
从结果队列
o
r
d
e
r
_
l
i
s
t
order\_list
order_list 按顺序取出样本点,直到结果队列为空:
若该点的可达距离 <= eps,则属于当前聚类簇
否则:
若该点的核心距离 > eps,为噪声点
若该点的核心距离 < eps,为新的聚类簇
四、numpy实现的代码
参考:武大博士的知乎——《聚类算法之OPTICS算法》
其他参考链接:
三、3、定义簇部分 ——《dbscan和optics(完结撒花~)》
二、4、算法流程(最精简)部分—— ——曾依灵, 许洪波, 白硕. 改进的OPTICS算法及其在文本聚类中的应用[C]// 全国信息检索与内容安全学术会议. 2007:51-55.
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)