12.1 回环检测概述
前面已经介绍过了前端和后端,前端用于特征点的提取以及轨迹、地图的初始值,而后端负责对这部分数据进行优化。考虑到误差的存在,每一个时刻存在的误差会不断累积,从而产生累积误差的问题,使得长期的估计结果不可靠,或者说无法得到一个全局一致的轨迹和地图。

虽然后端能够估计最大后验误差,但所谓“好模型架不住烂数据”,只有相邻关键帧数据时,我们能做的事情并不很多,也无从消除累积误差。但是,回环检测模块,能够给出除了相邻帧之外的,一些时隔更加久远的约束,比如说第一帧和第一百帧之间的位姿变换。这个约束主要是因为相机能够察觉相机经过了同一个地方,而且采集到了相似的数据。
回环检测的关键就是如何有效地检测出相机经过了同一个地方这件事。如果检测到了回环,就可以为后端的优化提供更多的有效数据,从而得到一个更好的优化,特别是一个全局一致的估计,这样我们就可以把偏差根据检测到的回环点,“拉正”到一个合适的位置。
回环系统对于SLAM系统意义重大,它关系到我们估计的轨迹和地图在长时间下的正确性。一些情况下,我们将仅有前端和局部后端的系统称为VO,而将带有回环检测和全局后端的称为SLAM。
一般提到回环检测,最简单的思路就是将任意的两张图片都进行一遍特征匹配,根据正确匹配的数量来确定哪两个图像之间存在关联。这种思路的问题在于检测的数量实在是太大,对于实时系统来说不是很实用。另一种思路是随机抽取历史数据进行回环检测,这种做法能够维持常数时间的运算量,但是这种盲目试探方法在帧数增长时,抽到回环的几率又大幅下降,使得检测效率不高。
在实际情境下,大多数的回环检测都是依据下面的两个思路:基于里程计的几何关系和基于外观。
基于里程计是指当我们发现当前相机运动到了之前的某个位置附近时,检测它们有没有回环关系。这自然是一种直观的想法,但是由于累积误差的存在,我们往往没法正确地发现“运动到了之前的某个位置附近”这件事实,回环检测也无从谈起。也就是说,理想情况下,当我们根据里程计检测到运动回原点附近的时候,自然会出现回环,但是因为累积误差,里程计本身的结果就不一定准确,里程计回到原点,真实情况下可并不是这样,自然无法用其校正回环。
基于外观则与前端和后端的估计都无关,仅仅根据两张图像的相似性来确定回环检测关系,这种方式能够有效地在不同的场景下工作,所以已经成为了SLAM中的主流做法。
在基于外观的方式下,核心问题是如何计算图像之间的相似性。一般的思路是利用相似性评分,当评分大于一定值的时候认为产生了回环。但是我们并不能直接使用灰度值,也就是将两个图像的灰度值相减然后套个外壳。
这种方式的问题有两个。首先,灰度值不是一种稳定的测量值,它会受到环境光和相机曝光的影响。另一方面,当相机视角发生少量变化时,即使每个物体的光度不变,它们的像素也会在图像中发生位移,造成一个很大的差异值。
所以我们说,这个函数s不能很好的反映图像间的相似关系。这里牵涉到一个“好”和“不好”的定义问题。这里可以引出感知偏差和感知变异两个概念。根据回环检测的结果,我们可以产生下面四种结果:
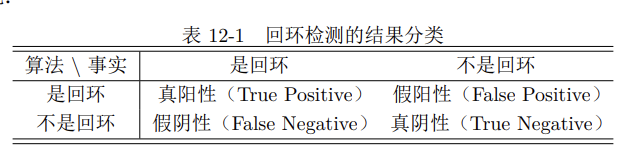
这其实就是机器学习里面分类那部分的四种结果,只不过这里换了个说法。借用医学上的说法,将假阳性称为感知偏差,将假阴性称为感知变异。我们希望TP和TN要尽可能高,在此基础上引入了准确率和召回率:

从公式字面意义上来看,准确率描述的是,算法提取的所有回环中,确实是真实回环的概率,换句话说就是认为是真的判断只能怪有多少是正确的判断。而召回率则是说,在所有真实回环中,被正确检测出来的概率,也就是真实情况为真的个例中有多少被正确地判断出来了。
这两个统计量本身是两个矛盾。准确率高可以表现为只筛选“把握”高的个例,这意味着只有一小部分把握很高的个例才会被认为产生了回环,所以有大量把握不大但是真的是回环的帧被落下了,自然会导致召回率增高。反过来,召回率高可以通过将所有帧都看做回环来实现,这种情况下,召回率能达到100%,但是正确率会很低,因为将大量不是回环的帧认为是回环。
为了评价算法的好坏,我们会测试它在各种配置下的P和R值,然后做出一条Precision-Recall曲线。当用召回率为横轴,用准确率为纵轴时,我们会关心整条曲线偏向右上方的程度、100%准确率下的召回率,或者50%召回率时候的准确率,作为评价算法的指标。
在SLAM中,我们对准确率要求更高,所以在选择回环检测算法的时候,更加倾向于将参数设置地更加严格,或者在检测之后加上回环验证的步骤。
12.2 词袋模型
两张图像直接相减的方法不好,我们完全可以借鉴VO的特征点方法。一种很类似的方法就这样出现了,即词袋模型。
词袋的目的是利用图上有哪几个特征来描述一个图像。比如说这个图上有一辆车一条狗,另一张图上有一匹马和一台电脑等。具体来说,我们将车、狗、马、电脑这种概念称为单词,许多单词组成了字典,这样可以根据一张图上有什么没有什么,将图像用一个向量来表示,通过向量和字典的比较,来表示相似程度。

上图就是对一张图的简单描述,字典中一共有w1w2w3三个特征,对于图片A来说,它只有w1和w2两个特征。
利用这种向量,来表示图像是否含有某类特征,比直接使用灰度值要准确的多。又因为描述向量说的是“是否出现”,而不管它们“在哪
儿出现”,所以与物体的空间位置和排列顺序无关,因此在相机发生少量运动时,只要物体仍在视野中出现,我们就仍然保证描述向量不发生变化。
基于这种向量的表示,我们可以描述相似性:
其中范数取 L1 范数,即各元素绝对值之和。请注意在两个向量完全一样时,我们将得到1;完全相反时(a为0的地方b为1)得到0。这样就定义了两个描述向量的相似性,也就定义了图像之间的相似程度。
12.3 字典
根据前面的介绍,字典是单词的集合,一个单词表示一个概念,但是一个单词并不能与一个单独的特征点划等号,它本身不是从图像上提取出来的,而是一类特征的组合,所以字典的生成就类似一个聚类问题。
假设我们对大量的图像提取了N个特征点,我们想用这些特征点,去构建一个大小为k的字典,我们的方法就是用典型的聚类算法Kmeans算法。

利用这种方法,我们提取到了字典需要的k个单词,现在问题是我们入耳利用图像的特征点,去查找字典中需要的单词。
首先,我们需要明确字典的大小,显然字典必须要够大,这是基于通用性的考虑,我们会使用一个较大规模的字典,去保证当前使用环境中的特征在字典中都有出现,不能出现“查无此词”的现象。所以查字典的过程就是一个大问题。对于这个问题,我们一般使用树结构去优化:

最简单的方法是用k叉树去表示:

最终我们仍在叶子层构建了单词,而树结构中的中间节点仅供快速查找时使用。这样一个k分支,深度为d的树,可以容纳k^d个单词。另一方面,在查找某个给定特征对应的单词时,只需将它与每个中间结点的聚类中心比较(一共d次),即可找到最后的单词,保证了对数级别的查找效率。
12.4 相似度计算
有了字典,我们现在对于任何一个给定的特征,就可以在字典树里面查找,从而得到一个对应的单词。这种方法的缺点在于,我们对所有的单词都是一视同仁的,而对于一些重要性不同的特征,这种一视同仁是及其不公平的。
对于这个问题,我们借鉴文本检索中的TF-IDF思想。TF部分的思想是,某单词在一个图像中经常出现,它的区分度就高。另一方面,IDF的思想是,某单词在字典中出现的频率越低,则分类图像时区分度越高。
在词袋模型中,在建立字典时可以考虑 IDF 部分。我们统计某个叶子节点wi中的特征数量相对于所有特征数量的比例,作为IDF部分。假设所有特征数量为n,wi数量为ni,那么该单词的IDF为:
另一方面,TF部分则是指某个特征在单个图像中出现的频率。假设图像A中,单词wi出现了ni次,而一共出现的单词次数为n,那么TF为:
于是wi的权重等于TF乘IDF之积:
考虑权重以后,对于某个图像A,它的特征点可对应到许多个单词,组成它的词袋就变成下面的形式:

这种情况下,差异的计算也会发生变化:

12.5 实验分析与评述
在SLAM中,我们经常会怀疑是不是字典选择太小了。具体来说,当字典规模增加时,无关图像的相似性明显变小了。而相似的图像,虽然分值也略微下降,但相对于其他图像的评分,却变得更为显著了。这说明增加字典训练样本是有益的。
对于一些相似度本身很大的场景,比如楼道,利用相似性评分的分值的绝对大小,并不会有很大的帮助,这时我们一般采用一个先验相似度,去表示某时刻关键帧图像与上一个时刻的关键帧的相似性,然后利用这个值去对剩下的分值做一个归一化:

站在这个角度上,我们说:如果当前帧与之前某关键帧的相似度,超过当前帧与上一个关键帧相似度的3倍,就认为可能存在回环。这个步骤避免了引入绝对的相似性阈值,使得算法能够适应更多的环境。
对于回环检测使用的帧,从实践上说,用于回环检测的帧最好是稀疏一些,彼此之间不太相同,又能涵盖整个环境。但是对于已经检测到回环的情况,假设是第1帧和第n帧,这两帧检测到了回环,对于优化是有帮助的,但接下去的n+1和n+2都会产生回环,产生的帮助就没那么大了,甚至有些多余,这种情况下,我们会把“相近”的回环聚成一类,使算法不要反复地检测同一类的回环。
词袋的回环检测算法完全依赖于外观而没有利用任何的几何信息,这导致外观相似的图像容易被当成回环。并且,由于词袋不在乎单词顺序,只在意单词有无的表达方式,更容易引发感知偏差。验证的方法有很多。其一是设立回环的缓存机制,认为单次检测到的回环并不足以构成良好的约束,而在一段时间中一直检测到的回环,才认为是正确的回环。这可以看成时间上的一致性检测。另一方法是空间上的一致性检测,即是对回环检测到的两个帧进行特征匹配,估计相机的运动。然后,再把运动放到之前的位姿图中,检查与之前的估计是否有很大的出入。总之,验证部分通常是必须的,但如何实现却有很多种方法。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)