docker 无法删除场景
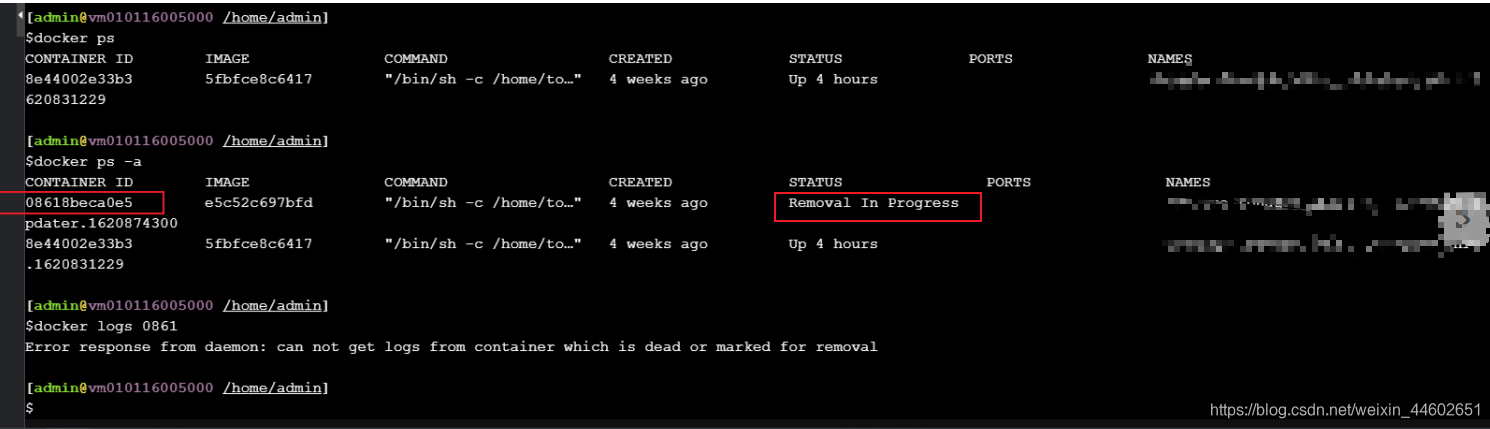
docker 进入Removal In Progress状态,无法直接删除
1、docker rm -f 容器 提示文件无权限操作

2、xxxx 表示上图的文件路径
需要登录到宿主机上,执行
chattr -a xxxxx
或者
chattr -i xxxxx
3、重新删除即可
4、可以执行 命令 查看文件属性
lsattr xxxxxx
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)