一、卫星测距原理说明
天上的卫星发送数据被便携式RTK终端接收到,卫星和终端之间的距离D=C*T; C为光速,T为卫星发送的信号到达便携式RTK终端的时间,通过时间乘以距离可以获得卫星和便携式终端的实时距离。

二、卫星定位原理说明
当4个以上卫星和终端通信的时候就可以获得多个卫星和终端之间的实时距离,如下图所示我们可以获得终端和多个卫星之间的实时距离。

获得卫星和多个终端之间的距离后,我们可以卫星为中心,卫星到终端距离为半径画圆圈,此时多个圆圈的交点就是终端的位置。但是,实际情况下所有圆圈是很难交汇于一点的,原因是卫星和终端之间的测距会有误差,测距误差就会带来定位的误差。

三、卫星测距误差的来源
由于电离层、对流层折射、反射,等因素带来的干扰就会导致测距不准,测距不准从而导致定位不准的问题。

四、如何消除定位误差
我们可以在一个固定的地方建立一个已知坐标的差分基准站,该已知坐标的终端在和卫星实时定位的位置坐标做比较,就可以获得这个真实坐标和实时坐标的误差值。

五、如何把误差给到便携式RTK终端
方法一:我们可以通过UWB、电台、wifi等方式直接把误差值实时给到便携式RTK终端,便携式终端通过实时误差消除就可以获得实时高精度定位了。

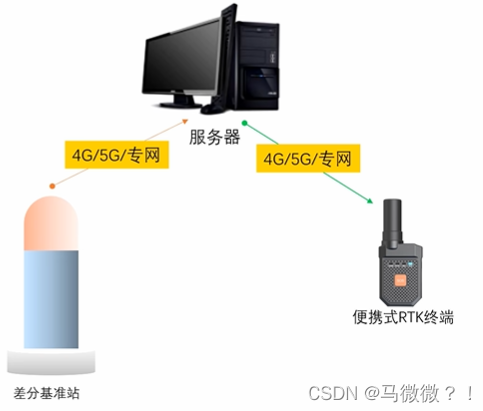
方法二:差分基准站通过4G等方式把误差数据传输到服务器,便携式RTK终端在通过服务器获取误差,这种方式就叫做网络差分,便携式终端通过网络去获取差分数据。
六、建设好的差分基准站照片

七、实时位置数据的获取

八、安装好的车载RTK终端照片
棒状的是UWB天线,蘑菇头形状的是卫星信号接收天线。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)