目录
一、Cmake是一种跨平台编译工具
二、CMake说明
三、编写CMakeList.txt
四、使用 cmake
一、Cmake是一种跨平台编译工具
比make更高级,使用起来要方便得多。
CMake主要是编写CMakeLists.txt文件,然后用cmake命令将CMakeLists.txt文件转化为make所需的makefile文件,最后用make命令编译源码生产可执行程序或共享库(so(shared object))。因此CMake的编译基本就两个步骤:
1.cmake
2.make
二、CMake说明
一般把CMakeLists.txt文件放在工程目录下,使用时,先创建一个叫build的文件夹(这个并非必须,因为cmake后生成很多编译的中间文件以及makefile文件,所以一般建议新建一个新的目录,专门用来编译),然后执行下操作:
cd build
cmake ..
make
其中cmake .. 在build里生成Makefile,make根据生成的makefile文件,编译程序,make应当在有Makefile生成可执行文件。
三、编写CMakeList.txt
# 1. 声明要求的cmake最低版本
cmake_minimum_required( VERSION 2.8 )
# 2. 添加c++11标准支持
#set( CMAKE_CXX_FLAGS "-std=c++11" )
# 3. 声明一个cmake工程
PROJECT(rpt_main)
MESSAGE(STATUS "Project: SERVER") #打印相关消息消息
# 4. 头文件
include_directories(
${PROJECT_SOURCE_DIR}/../include/mq
${PROJECT_SOURCE_DIR}/../include/incl
${PROJECT_SOURCE_DIR}/../include/rapidjson
)
# 5. 通过设定SRC变量,将源代码路径都给SRC,如果有多个,可以直接在后面继续添加
set(SRC
${PROJECT_SOURCE_DIR}/../include/incl/tfc_base_config_file.cpp
${PROJECT_SOURCE_DIR}/../include/mq/tfc_ipc_sv.cpp
${PROJECT_SOURCE_DIR}/../include/mq/tfc_net_ipc_mq.cpp
${PROJECT_SOURCE_DIR}/../include/mq/tfc_net_open_mq.cpp
${PROJECT_SOURCE_DIR}/local_util.cpp
${PROJECT_SOURCE_DIR}/AgentMemRpt.cpp
${PROJECT_SOURCE_DIR}/AgentDiskRpt.cpp
${PROJECT_SOURCE_DIR}/AgentLoadRpt.cpp
${PROJECT_SOURCE_DIR}/AgentIoRpt.cpp
${PROJECT_SOURCE_DIR}/AgentNetRpt.cpp
${PROJECT_SOURCE_DIR}/AgentCpuRpt.cpp
${PROJECT_SOURCE_DIR}/AgentProcessRpt.cpp
${PROJECT_SOURCE_DIR}/AgentParentRpt.cpp
${PROJECT_SOURCE_DIR}/AgentSysTop_5.cpp
${PROJECT_SOURCE_DIR}/BaseFeatureRptMain.cpp
)
# 6. 创建共享库/静态库
# 设置路径(下面生成共享库的路径)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
# 即生成的共享库在工程文件夹下的lib文件夹中
set(LIB_NAME rpt_main_lib)
# 创建共享库(把工程内的cpp文件都创建成共享库文件,方便通过头文件来调用)
# 这时候只需要cpp,不需要有主函数
# ${PROJECT_NAME}是生成的库名 表示生成的共享库文件就叫做 lib工程名.so
# 也可以专门写cmakelists来编译一个没有主函数的程序来生成共享库,供其它程序使用
# SHARED为生成动态库,STATIC为生成静态库
add_library(${LIB_NAME} STATIC ${SRC})
# 7. 链接库文件
# 把刚刚生成的${LIB_NAME}库和所需的其它库链接起来
# 如果需要链接其他的动态库,-l后接去除lib前缀和.so后缀的名称,以链接
# libpthread.so 为例,-lpthread
target_link_libraries(${LIB_NAME} pthread dl)
# 8. 编译主函数,生成可执行文件
# 先设置路径
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/bin)
# 可执行文件生成
add_executable(${PROJECT_NAME} ${SRC})
# 这个可执行文件所需的库(一般就是刚刚生成的工程的库咯)
target_link_libraries(${PROJECT_NAME} pthread dl ${LIB_NAME})
四、使用 cmake
- 进入
/home/pzqu/agent/libvirt_base_feature/build目录 - 执行命令
cmake ..
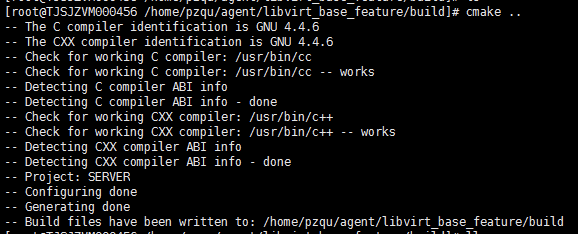
cmake ..
- 查看生成的目录结构,此目录结构是中间代码,不用提交到git
[root@TJSJZVM000456 /home/pzqu/agent/libvirt_base_feature/build]# tree
.
|-- CMakeCache.txt
|-- CMakeFiles
| |-- 2.8.12.2
| | |-- CMakeCCompiler.cmake
| | |-- CMakeCXXCompiler.cmake
| | |-- CMakeDetermineCompilerABI_C.bin
| | |-- CMakeDetermineCompilerABI_CXX.bin
| | |-- CMakeSystem.cmake
| | |-- CompilerIdC
| | | |-- CMakeCCompilerId.c
| | | `-- a.out
| | `-- CompilerIdCXX
| | |-- CMakeCXXCompilerId.cpp
| | `-- a.out
| |-- CMakeDirectoryInformation.cmake
| |-- CMakeOutput.log
| |-- CMakeTmp
| |-- Makefile.cmake
| |-- Makefile2
| |-- TargetDirectories.txt
| |-- cmake.check_cache
| |-- progress.marks
| |-- rpt_main.dir
| | |-- DependInfo.cmake
| | |-- build.make
| | |-- cmake_clean.cmake
| | |-- depend.make
| | |-- flags.make
| | |-- home
| | | `-- pzqu
| | | `-- agent
| | | `-- include
| | | |-- incl
| | | `-- mq
| | |-- link.txt
| | `-- progress.make
| `-- rpt_main_lib.dir
| |-- DependInfo.cmake
| |-- build.make
| |-- cmake_clean.cmake
| |-- cmake_clean_target.cmake
| |-- depend.make
| |-- flags.make
| |-- home
| | `-- pzqu
| | `-- agent
| | `-- include
| | |-- incl
| | `-- mq
| |-- link.txt
| `-- progress.make
|-- Makefile
`-- cmake_install.cmake
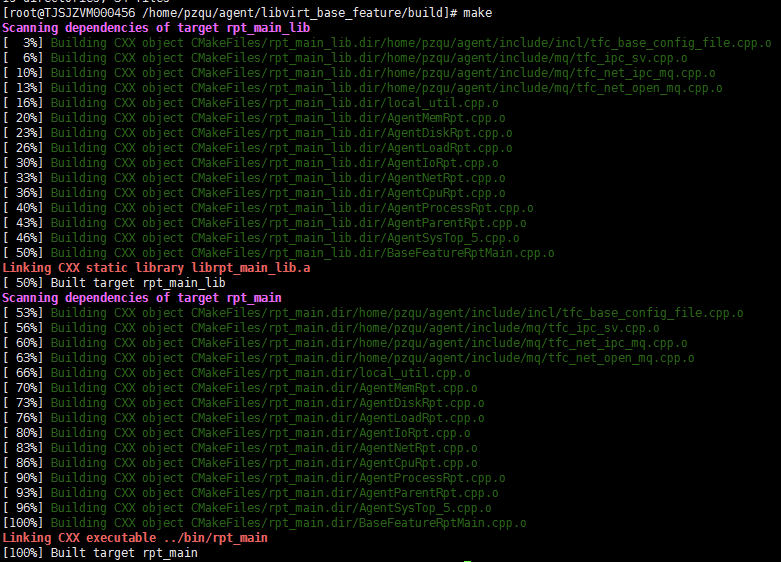
make
- 二进制文件所在目录(CMakeLists.txt文件配置)

成功生成二进制文件
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)