1、什么是nRF24L01
nRF24L01是由NORDIC生产的工作在2.4GHz~2.5GHz的ISM 频段的单片无线收发器芯片。有着极低的电流消耗。
nRF24L01与5V单片机的连接通过SPI接口进行通讯,输出功率频道选择和协议的设置可以通过SPI 接口进行设置,几乎可以连接到各种单片机芯片,并完成无线数据传送工作。

2、接口电路
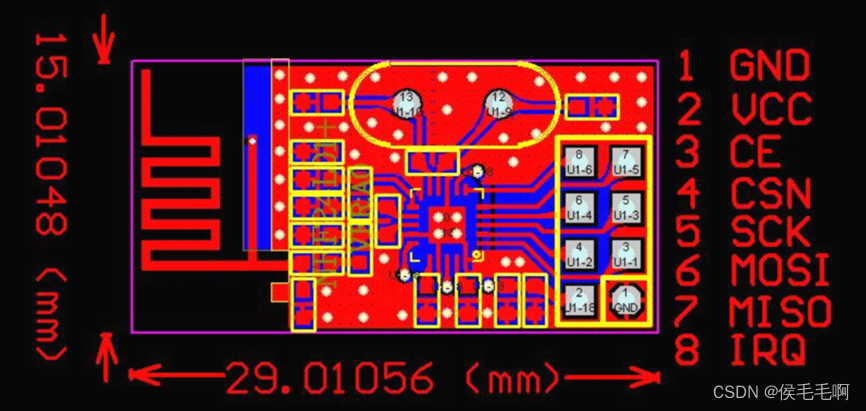
引脚说明
通过以下六个引脚,便可实现模块的所有功能:
(1)MOSI:主器件数据输出,从器件数据输入
(2)MISO:主器件数据输入,从器件数据输出
(3)SCLK:时钟信号,由主器件产生
(4) CSN :从器件使能信号(片选线)
(5)CE:芯片使能,使能器件的发送模式或者接收模式。高电平有效,在发送和接收过程中都要将这个引脚拉高,
(6)IRQ:中断信号线,中断输出。低电平有效,中断时变为低电平,在以下三种情况变低:Tx FIFO 发完并且收到ACK(使能ACK情况下)、Rx FIFO收到数据、达到最大重发次数。
(7)VCC:电压范围1.9V~3.6V,超过3.6V将会烧毁模块。一般电压3.3V左右。除电源VCC和接地端,其余脚都可以直接和普通的5V单片机IO口直接相连,无需电平转换。
通过 SPI 接口,可激活在数据寄存器 FIFO 中的数据,或者通过 SPI 命令访问寄存器。
在待机或掉电模式下,单片机通过 SPI 接口配置模块;
在发射或接收模式下,单片机通过 SPI 接口接收或发射数据。
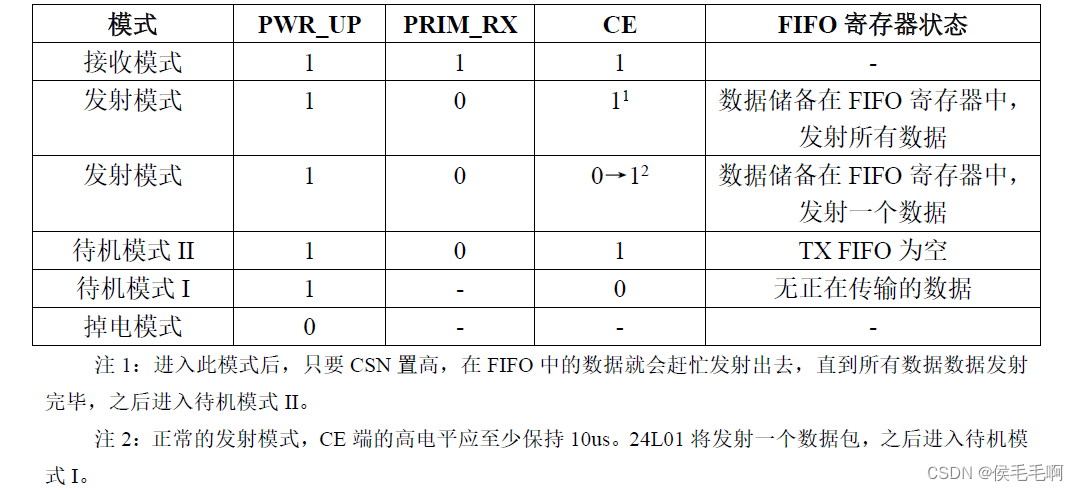
3、工作模式:
工作模式由 CE 和 PWR_UP (CONFIG寄存器第1位)、 PRIM_RX(CONFIG寄存器第0位) 两寄存器共同操纵:
也可以理解为NRF2401有工作模式有四种:
收发模式,配置模式,空闲模式,关机模式
收发模式(三种)
Enhanced ShockBurstTM收发模式
ShockBurstTM收发模式
直接收发模式
(只有Enhanced ShockBurstTM收发模式支持自动ACK和自动重发)
Enhanced ShockBurstTM收发模式(常用)
NRF24L01自动处理字头和CRC校验码。在接收数据时,自动把字头和CRC校验码移去。在发送数据时,自动加上字头和CRC校验码。
ShockBurstTM收发模式
发送方要求终端设备在接收到数据后有应答信号,以便发送方检测有无数据丢失,一旦丢失则重发数据。
直接收发模式
和传统的射频器件一样。数据必须是在传输频率为1Mbps、250kbps 或者低频状态进行设定,以保证接收机能探测到信号。
在接收模式下,最多可以接收6路不同的数据。每一个数据通道使用不同的地址,但是共用相同的频道。也就是说6 个不同的NRF24L01设置为发送模式后可以与同一个设置为接收模式的NRF24L01 进行通讯,而设置为接收模式的NRF24L01可以对这6个发射端进行识别。
数据通道0是唯一的一个可以配置为40位自身地址的数据通道;而数据通道1~5 都为8位自身地址和32位公用地址(由通道1设置)。所有的数据通道都可以设置为Enhanced ShockBurst 模式。
在接收端,确认收到数据后记录地址,并以此地址为目标地址发送应答信号。在发送端,通道0被用作接收应答信号,因此通道0的接收地址要与发送地址端地址相等,以确保接收到正确的应答信号。
配置模式 15 字节的配置字会在配置模式时下载到nRF2401 中,CE为0才能配置。
空闲模式(睡眠/待机模式):用来减小平均电流的损耗,在该模式下,晶体振荡器处于部分工作状态,电流损耗由晶体振荡器频率决定。在待机模式期间,寄存器配置字内容保持不变。
掉电模式:nRF20L01 各功能关闭,保持电流消耗最小。该模式下,nRF24L01 停止工作,当设备达不到最小的电流损耗或最大电量枯竭时,设备就会进入掉电模式。
4、发送
Enhanced ShockBurstTM发送流程
1.把地址和要发送的数据按时序送入NRF24L01;
2.配置CONFIG寄存器,使之进入发送模式;
3.微控制器把CE置高(至少10us),激发Enhanced ShockBurstTM发射;
4. 发射完成,NRF24L01进入空闲状态。
初始化NRF24L01到TX模式
1) CE置低
2) 写Tx节点的地址
3) 写Rx节点的地址,使能自动应答
4) 使能通道x的自动应答
5) 使能通道x的接收地址
6) 设置自动重发间隔时间和最大自动重发次数
7) 设置RF通道
8) 配置TX发射参数(低噪放大器增益、发射功率、无线速率)
9) 配置基本工作模式的参数
10)CE拉高,进入发送模式,注意CE要拉高一段时间才进入发送模式
void NRF_TX_Mode(void)
{
NRF_CE_LOW();
SPI_NRF_WriteBuf(NRF_WRITE_REG+TX_ADDR,TX_ADDRESS,TX_ADR_WIDTH);
SPI_NRF_WriteBuf(NRF_WRITE_REG+RX_ADDR_P0,RX_ADDRESS,RX_ADR_WIDTH);
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_AA,0x01);
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_RXADDR,0x01);
SPI_NRF_WriteReg(NRF_WRITE_REG+SETUP_RETR,0x1a);
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_CH,CHANAL);
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_SETUP,0x07);
SPI_NRF_WriteReg(NRF_WRITE_REG+CONFIG,0x0e);
NRF_CE_HIGH();
Delay(0xffff);
}
5、接收
Enhanced ShockBurstTM接收流程
1.配置接收地址和要接收的数据包大小;
2.配置CONFIG寄存器,使之进入接收模式,把CE置高;
3. 130us后,NRF24LO1进入监视状态,等待数据包的到来;
4.当接收到正确的数据包(正确的地址和CRC校验码),NRF2401自动把字头、地址和CRC校验位移去;
5.NRF24LO1通过把STATUS寄存器的RX_DR置位(STATUS一般引起微控制器中断)通知微控制器;
6.微控制器把数据从FIFO读出(0X61指令);
7.所有数据读取完毕后,可以清除STATUS寄存器。进入四种主要的模式之—。
初始化NRF24L01到RX模式
1) CE置低
2)写RX节点地址
3)使能通道x的自动应答
4)使能通道0的接收地址
5)设置RF通信频率
6)选择通道x的有效数据宽度
7)设置TX发射参数
8)配置基本工作模式的参数
9)CE拉高,进入接收模式
void NRF_RX_Mode(void)
{
NRF_CE_LOW();
SPI_NRF_WriteBuf(NRF_WRITE_REG+RX_ADDR_P0,RX_ADDRESS,RX_ADR_WIDTH);
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_AA,0x01);
SPI_NRF_WriteReg(NRF_WRITE_REG+EN_RXADDR,0x01);
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_CH,CHANAL);
SPI_NRF_WriteReg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);
SPI_NRF_WriteReg(NRF_WRITE_REG+RF_SETUP,0x07);
SPI_NRF_WriteReg(NRF_WRITE_REG+CONFIG, 0x0f);
NRF_CE_HIGH();
}
此外,还应有系统的初始化,主要有GPIO初始化,SPI初始化,NRF24L01中断初始化。
在GPIO初始化中,需要注意各引脚的工作模式:
SPI时钟,设置为复用推挽输出
SPI输出引脚(SOMI),设置为复用推挽输出
SPI输入引脚(SOMO),设置为悬浮输入
CS、CE引脚,使用软件控制,所以直接设置成推挽输出
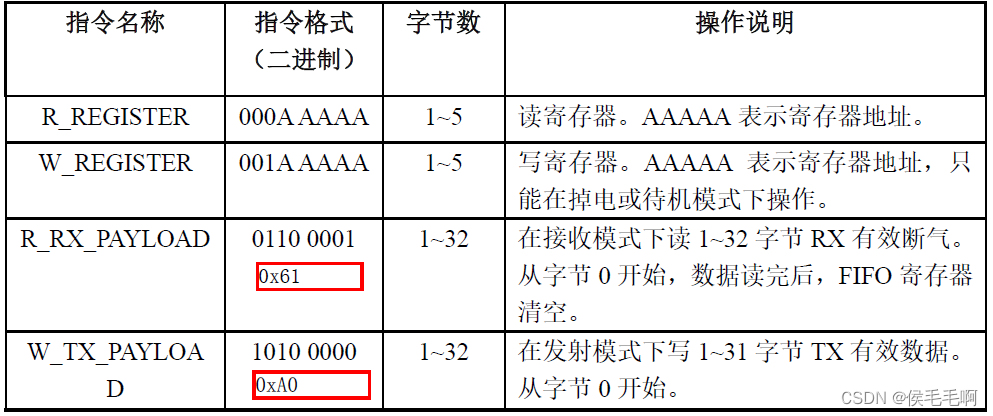
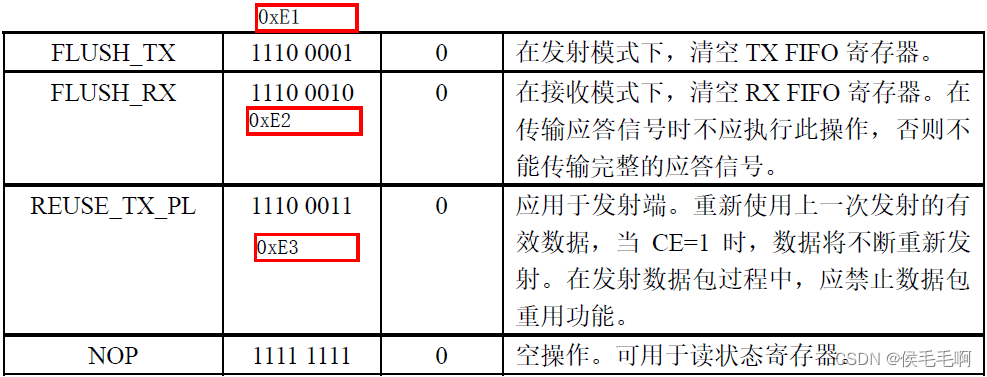
SPI指令
所有的 SPI 指令均在当 CSN 由低到高开始跳变时执行;从 MOSI 写命令的同时, MISO实时返回 24L01 的状态值; SPI 指令由命令字节和数据字节两部分组成。
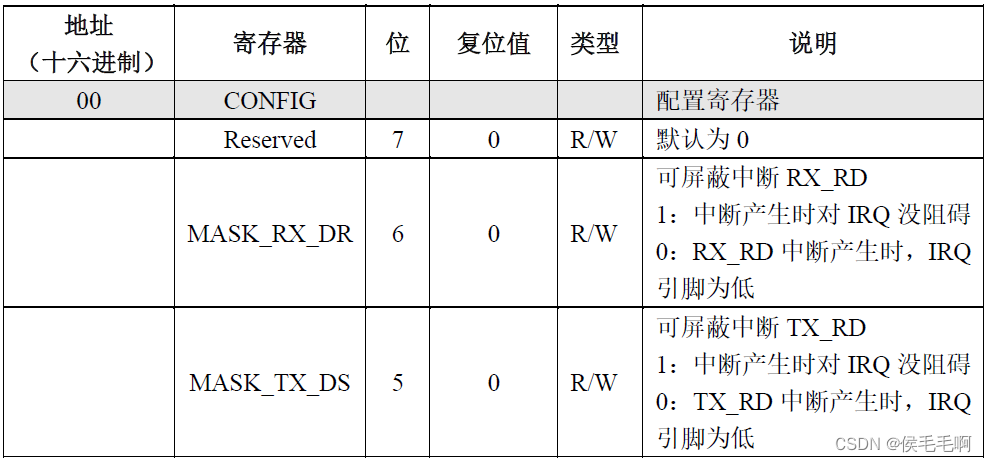
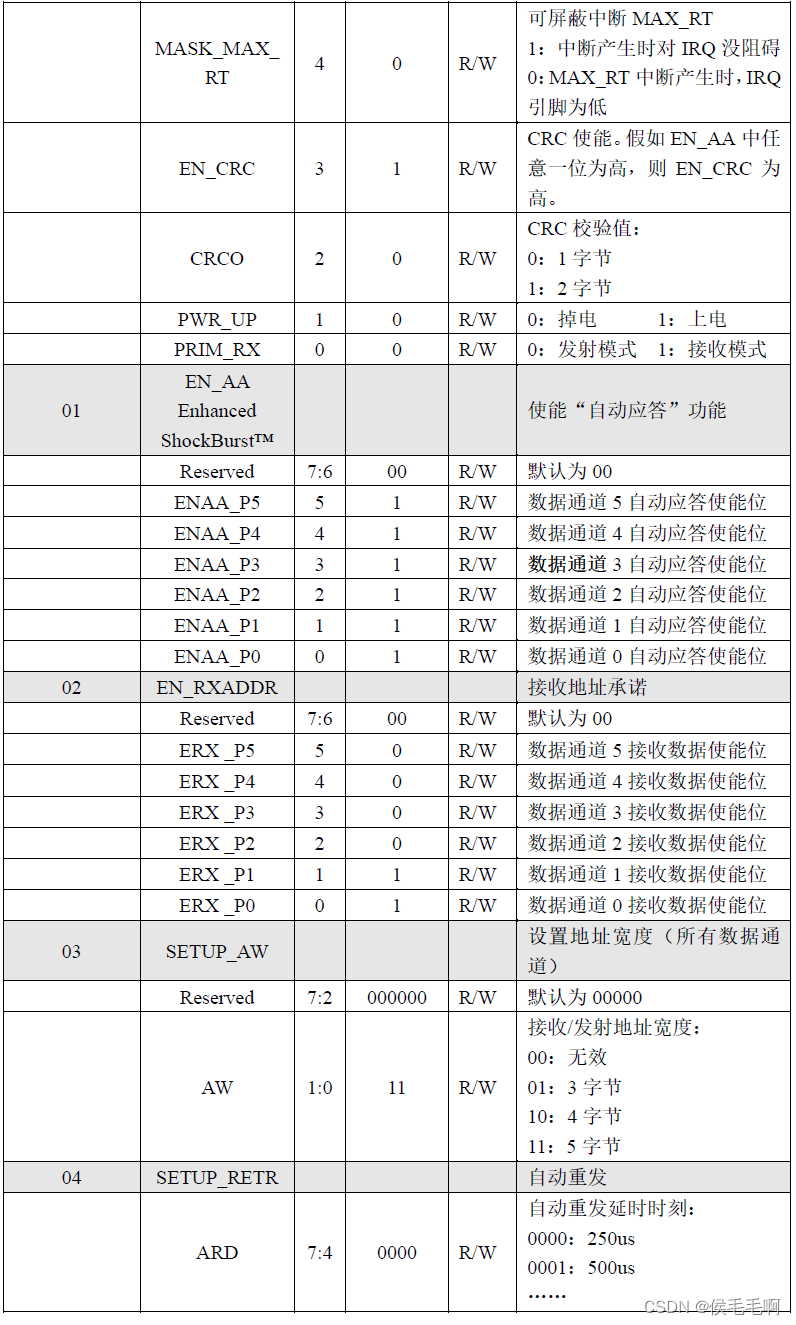
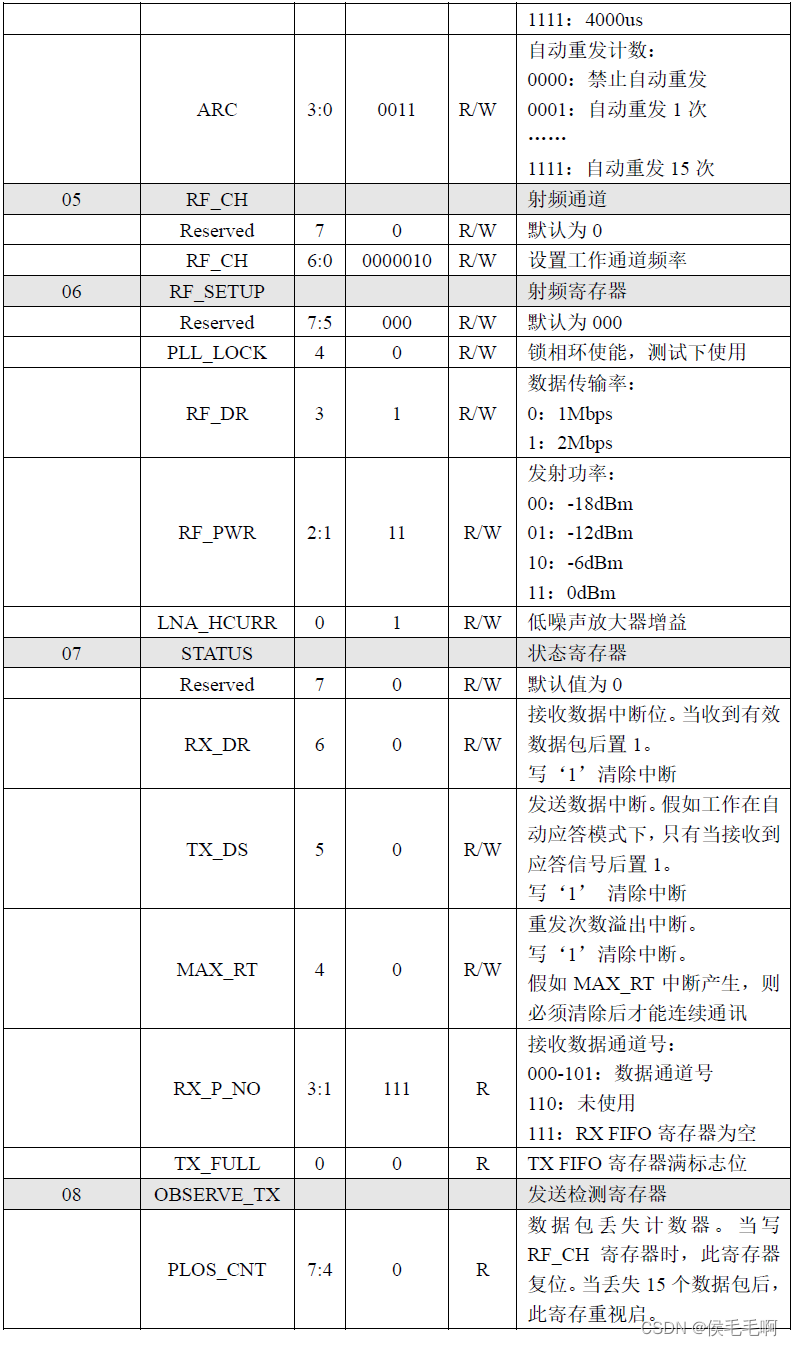
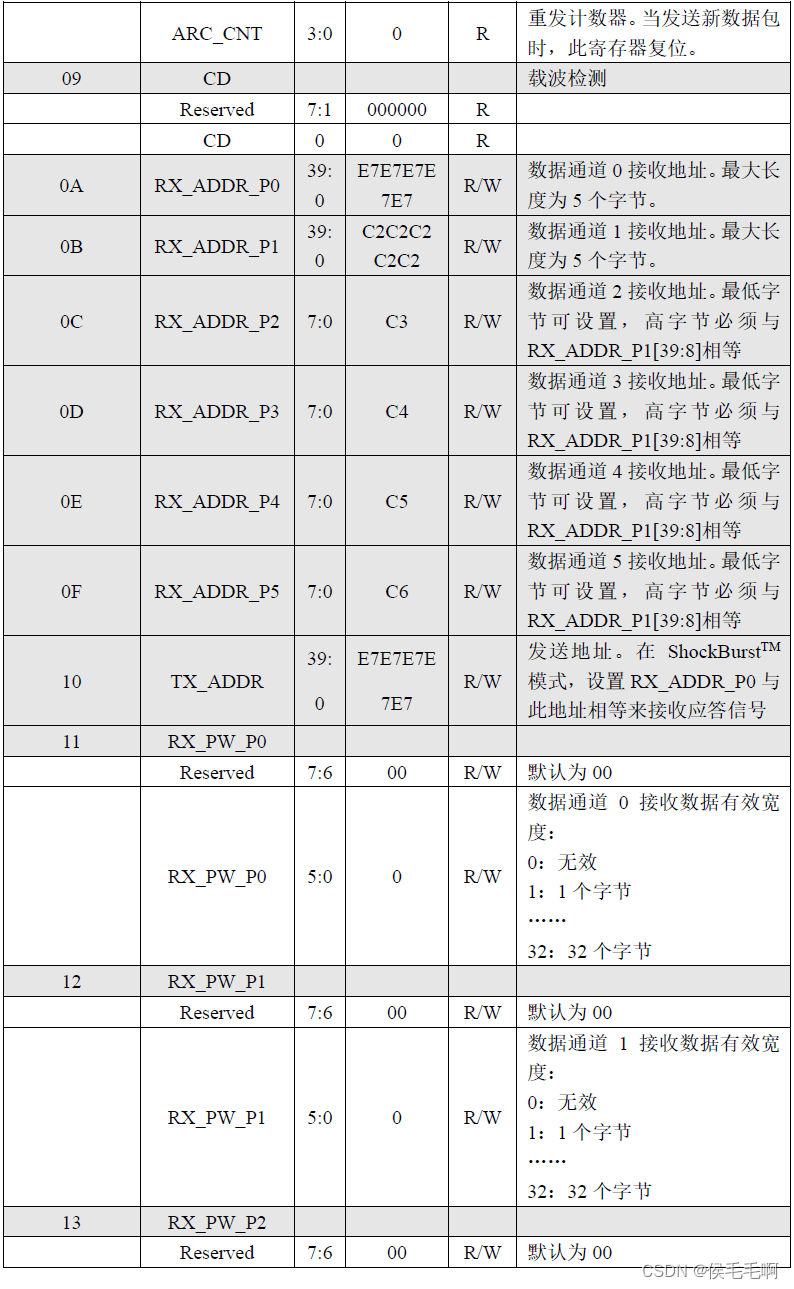
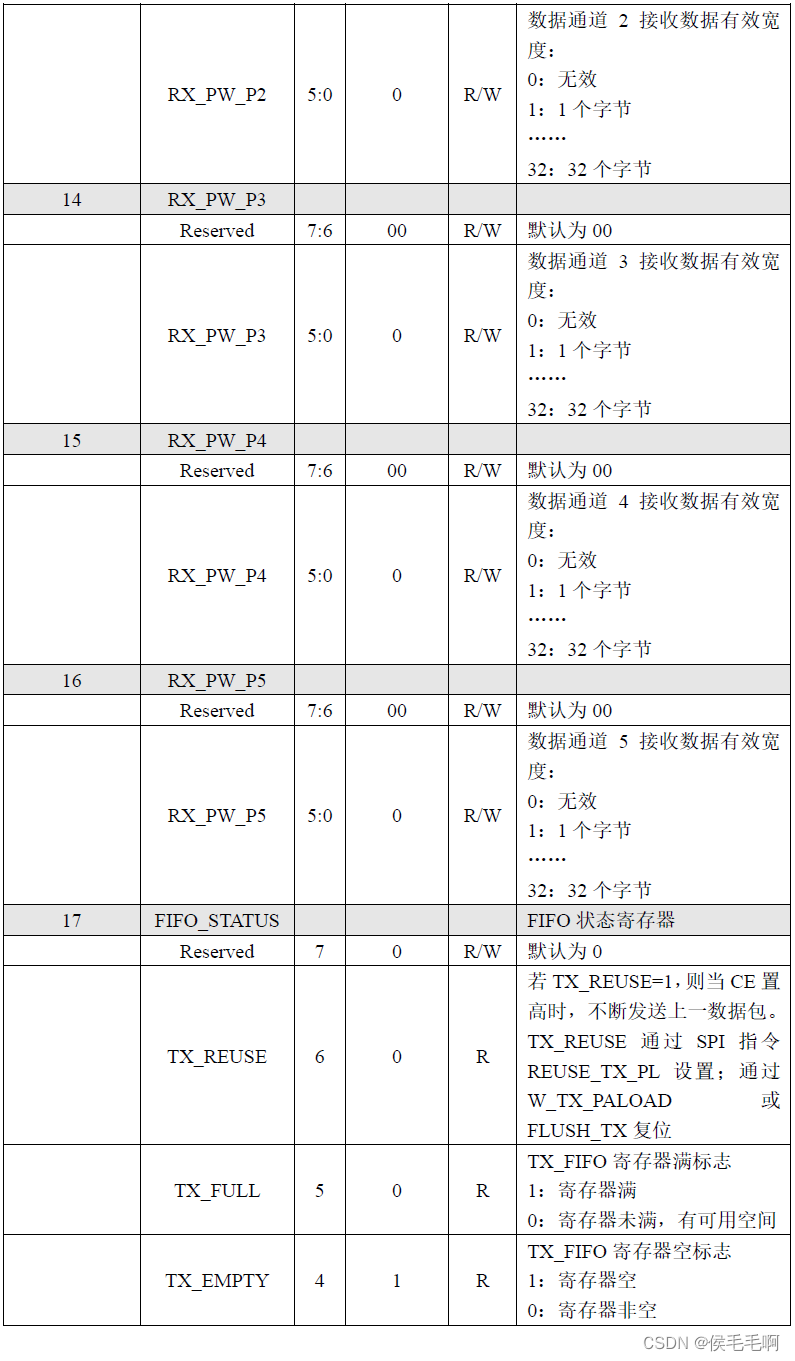
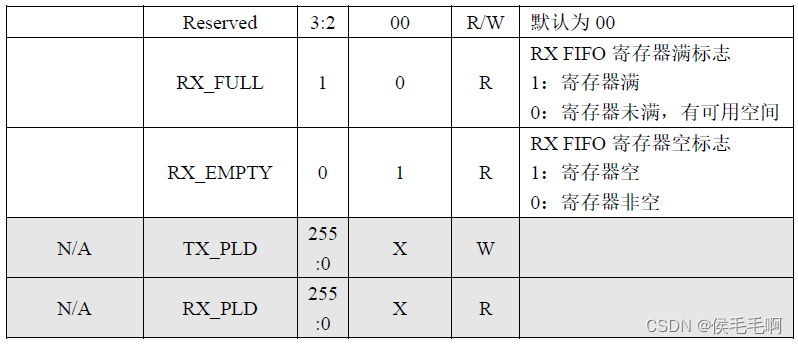
寄存器内容及说明
在写寄存器之前,一定要进入待机模式或掉电模式。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)