LGSVL+ROS联合仿真使用过程记录
- 1、LGSVL系统要求
- 2、我的环境
- 3、在PC上下载LGSVL
- 4、运行LGSVL
- 5、配置ROS环境
- 6、配置LGSVL仿真环境
- 7、最最最最最重要的一步!!!
- 8、联合仿真
1、LGSVL系统要求
at least 4 GHz Quad core CPU
NVIDIA GTX 1080 (8GB memory) or higher
Windows 10 (64-bit), Ubuntu 18.04 (64-bit), or Ubuntu 20.04 (64-bit)
2、我的环境
PC:部署LGSVL
系统:Windows10 pro
显卡:GTX1060
CPU:i5-8400
RAM:16G
ARM:已部署好ROS
硬件:NVIDIA Xavier
系统:Ubuntu 18.04
ROS:Melodic
PC与Xavier网线直连。
3、在PC上下载LGSVL
官网下载:https://www.svlsimulator.com/
官方参考文档:https://www.svlsimulator.com/docs/
4、运行LGSVL
下载完成之后,将压缩包进行解压缩。
运行 simulator 可执行文件,会打开以下窗口。

点击 LINK TO CLOUD,会自动打开网页,按照 3 中的官方文档注册账号,登录,并运行键盘控制车辆移动的Demo,说明一已安装好。
(开始在Ubuntu18.04中安装,点击LINK TO CLOUD无法联网,后重装系统在Windows10下可以正常运行)
5、配置ROS环境
安装rosbridge_server,还有msg等
sudo apt install ros-melodic-rosbridge*
报错:
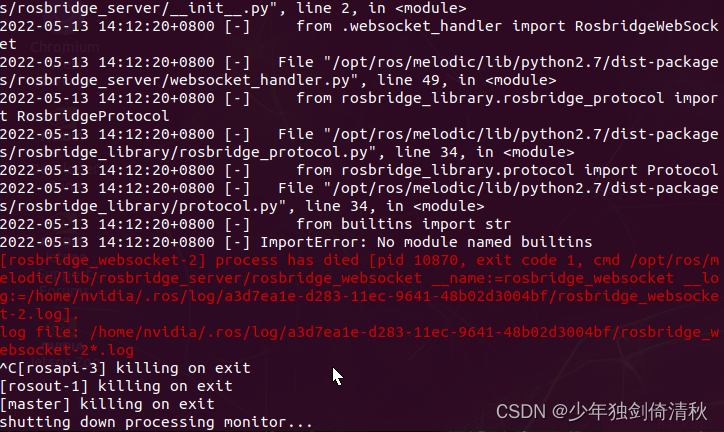
解决方法:
pip install future
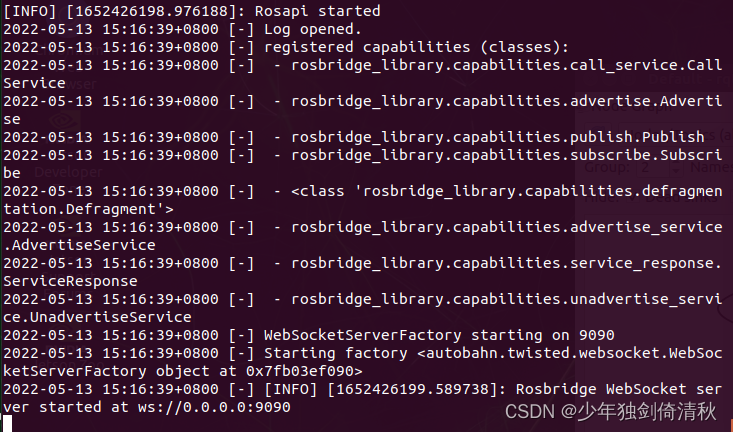
运行命令:
roslaunch rosbridge_server rosbridge_websocket.launch
正常运行起来之后,会到这一步
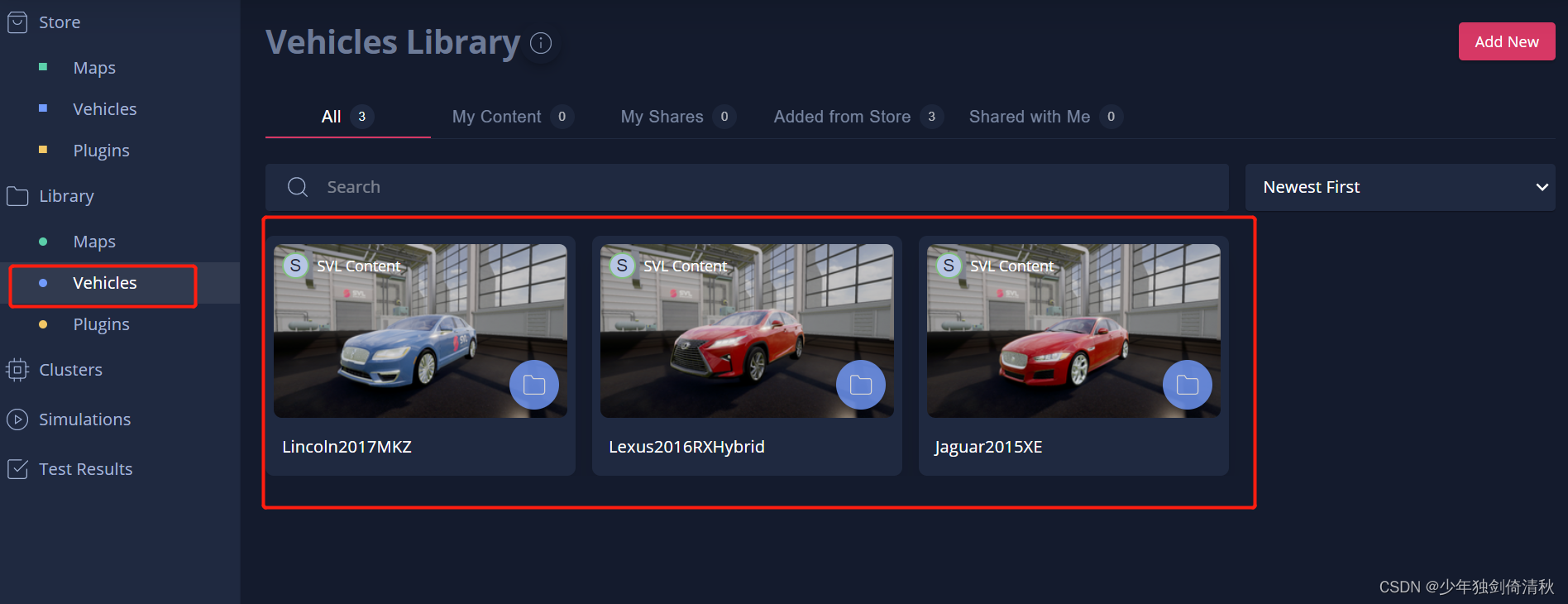
6、配置LGSVL仿真环境
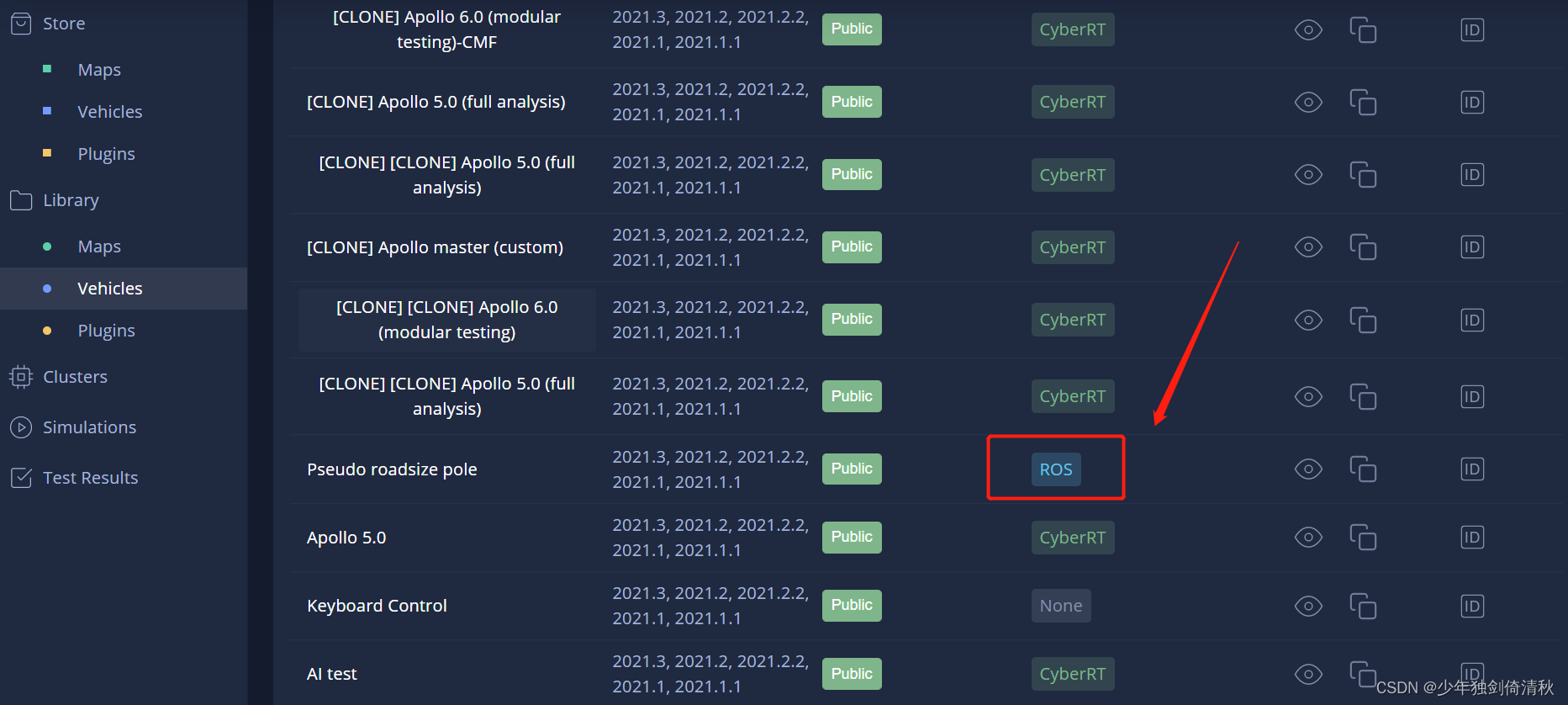
先选择一个自己喜欢的车辆,直接点击
点击这里,可以安装传感器以及配置传感器参数
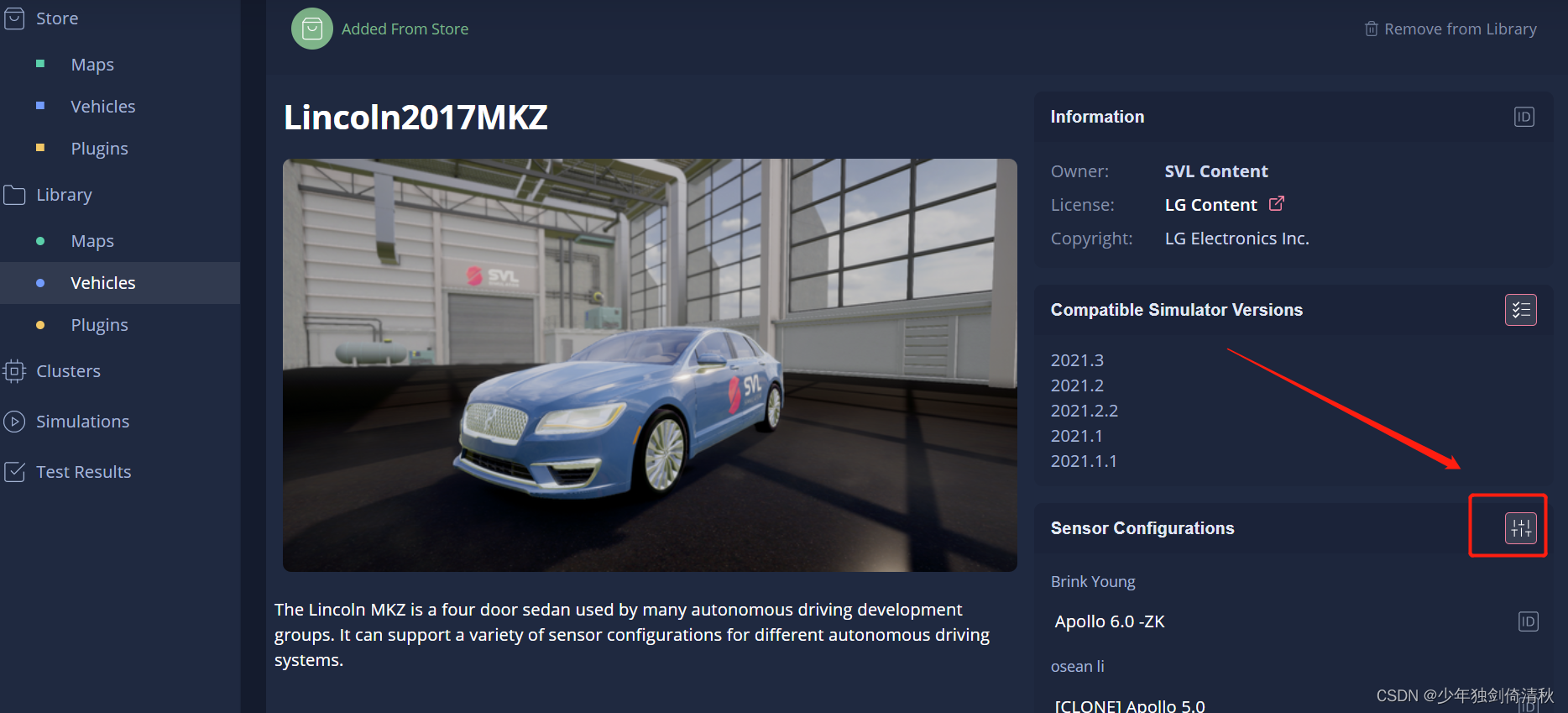
因为我是用的是ROS,所以选择bridge类型是ROS的,点击这个按钮可以复制其他人上传的传感器配置,来配置自己的传感器。
在这里插入图片描述](https://img-blog.csdnimg.cn/4ffca946f5394a2eae79a8af59b443f4.jpeg)
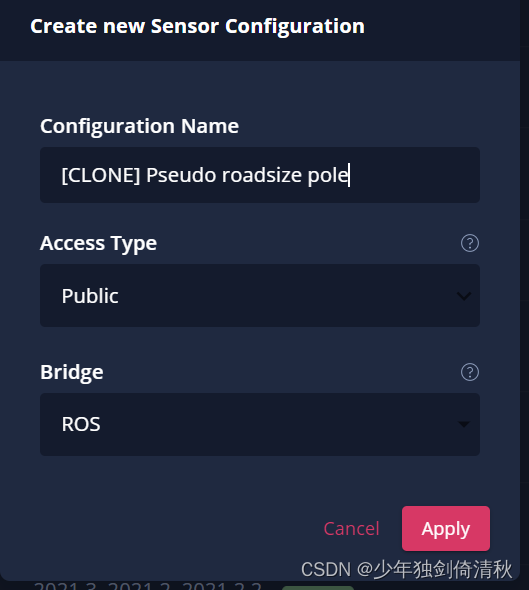
创建名称,是否公开,Bridge类型
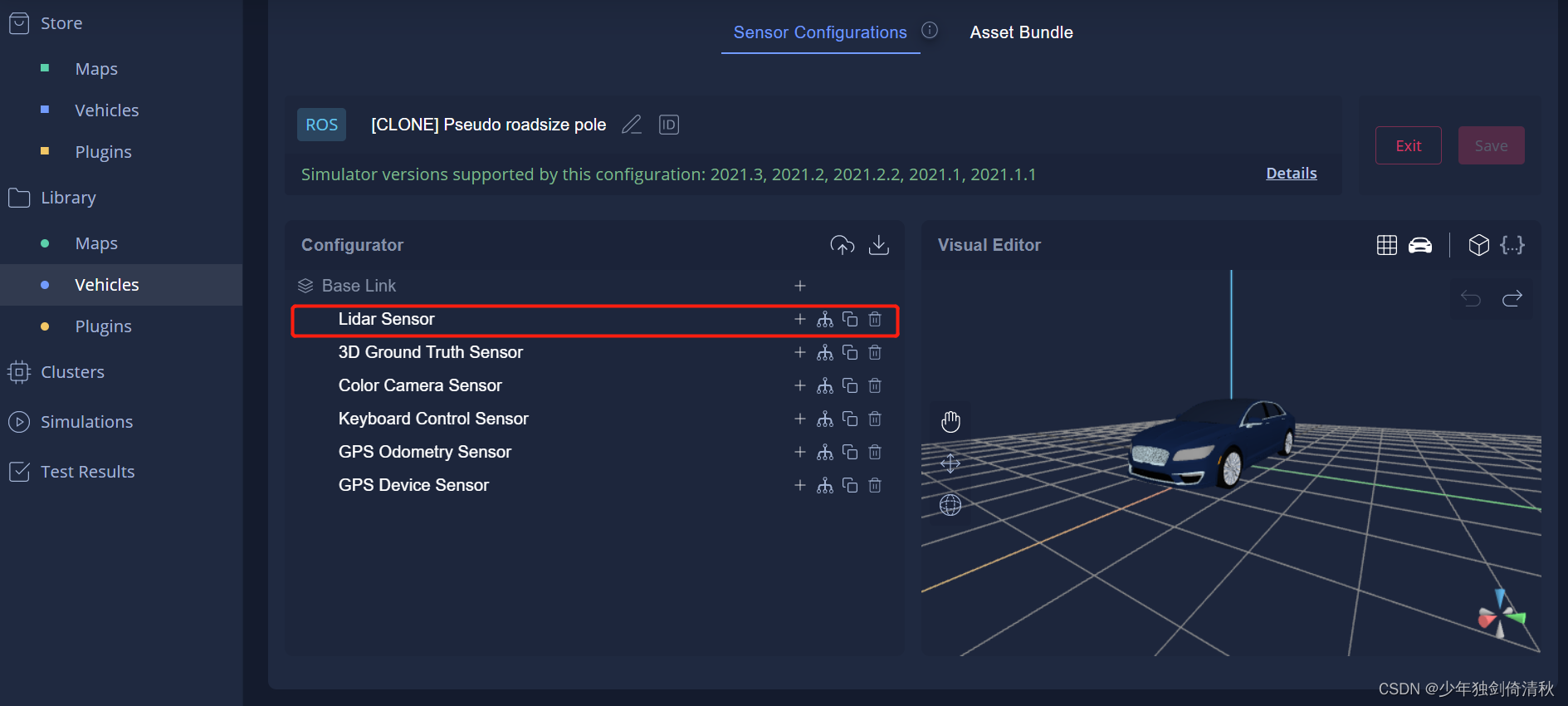
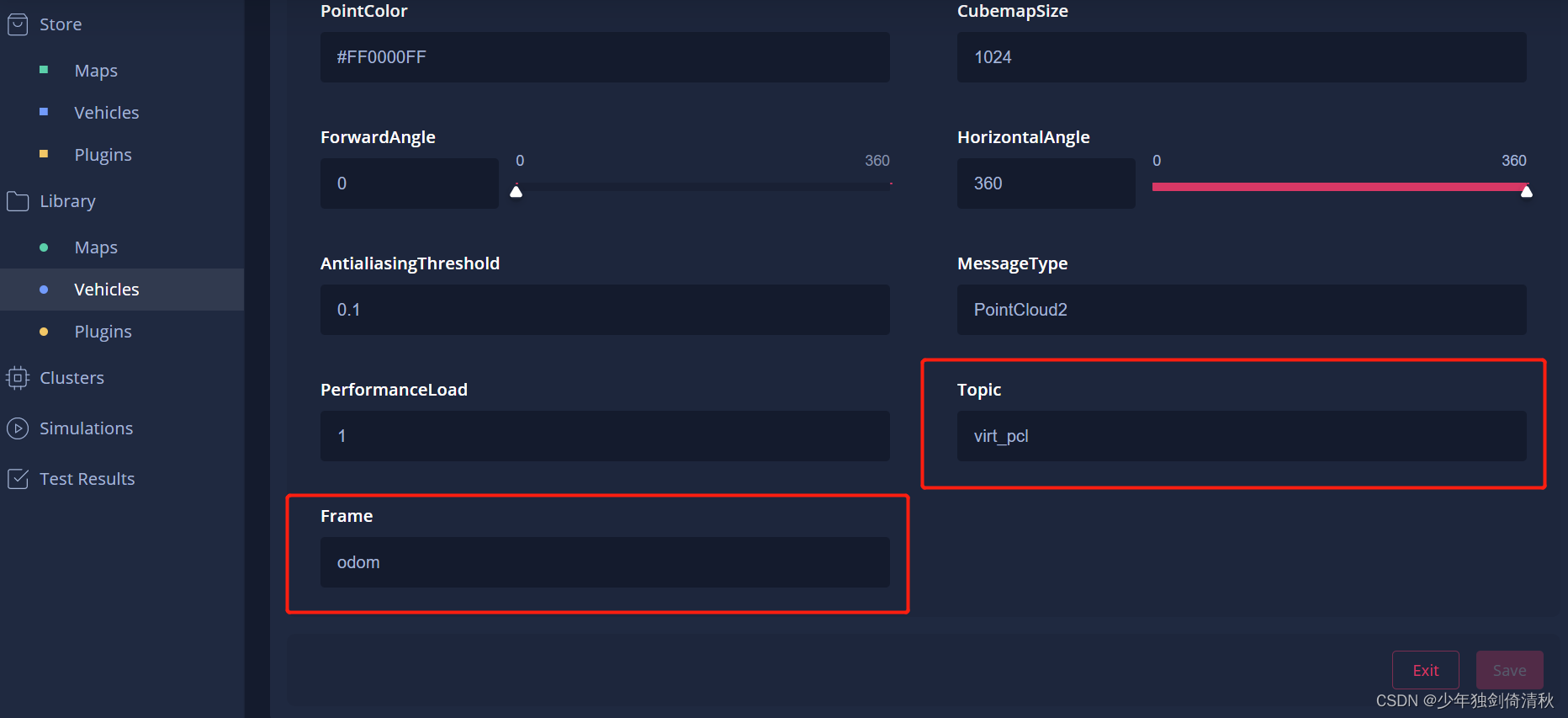
以激光雷达传感器为例
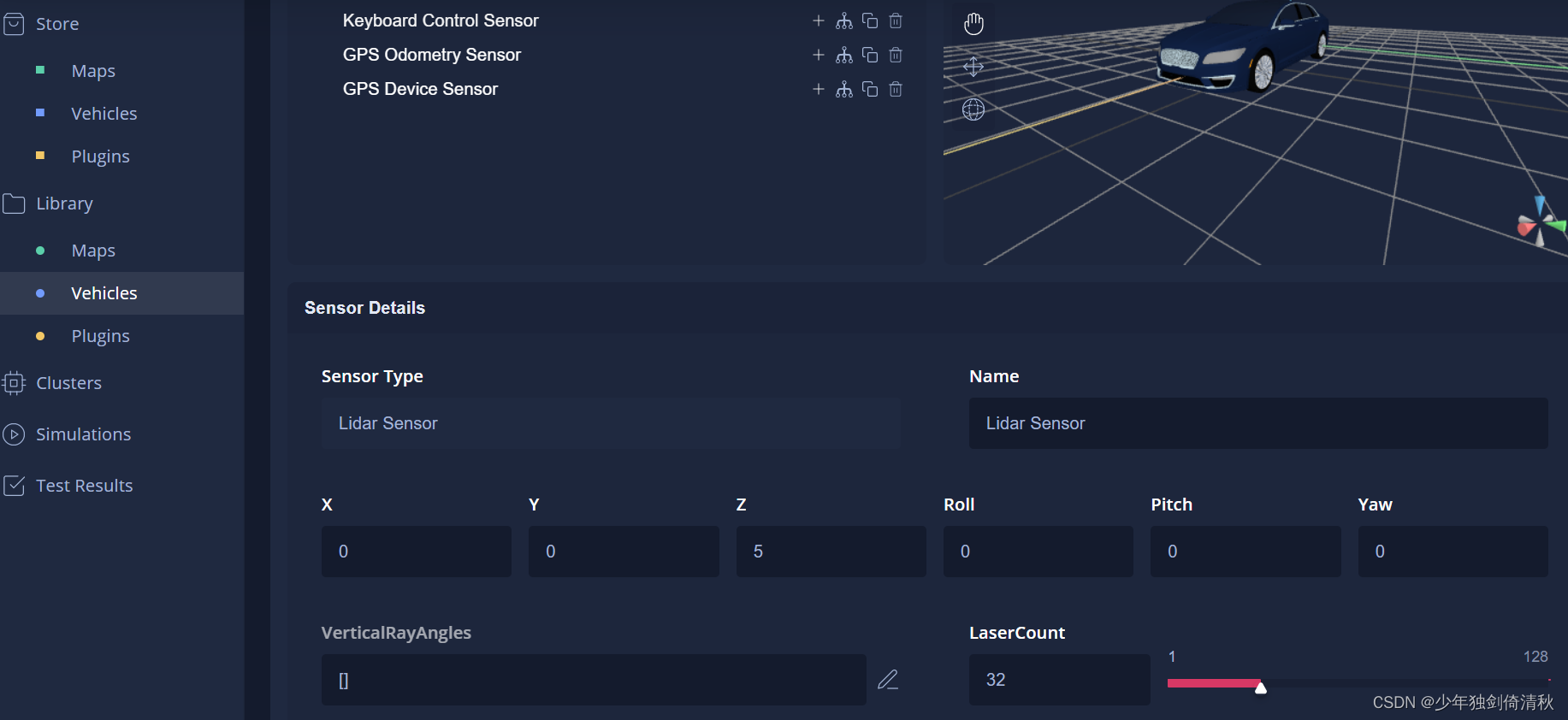
配置Frame和Topic,方便在Rviz中接收。还可以配置激光雷达具体硬件参数。修改好之后点击右下角的保存。
然后点击
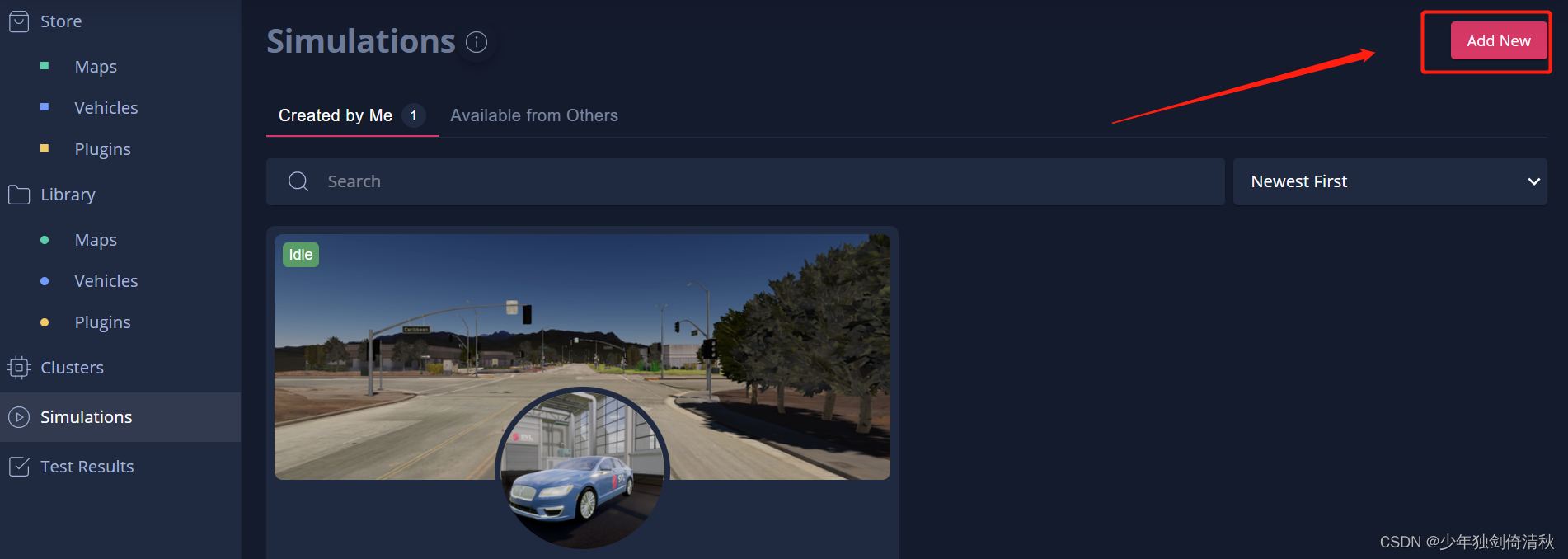
创建名称,选择自己的cluster,下一步
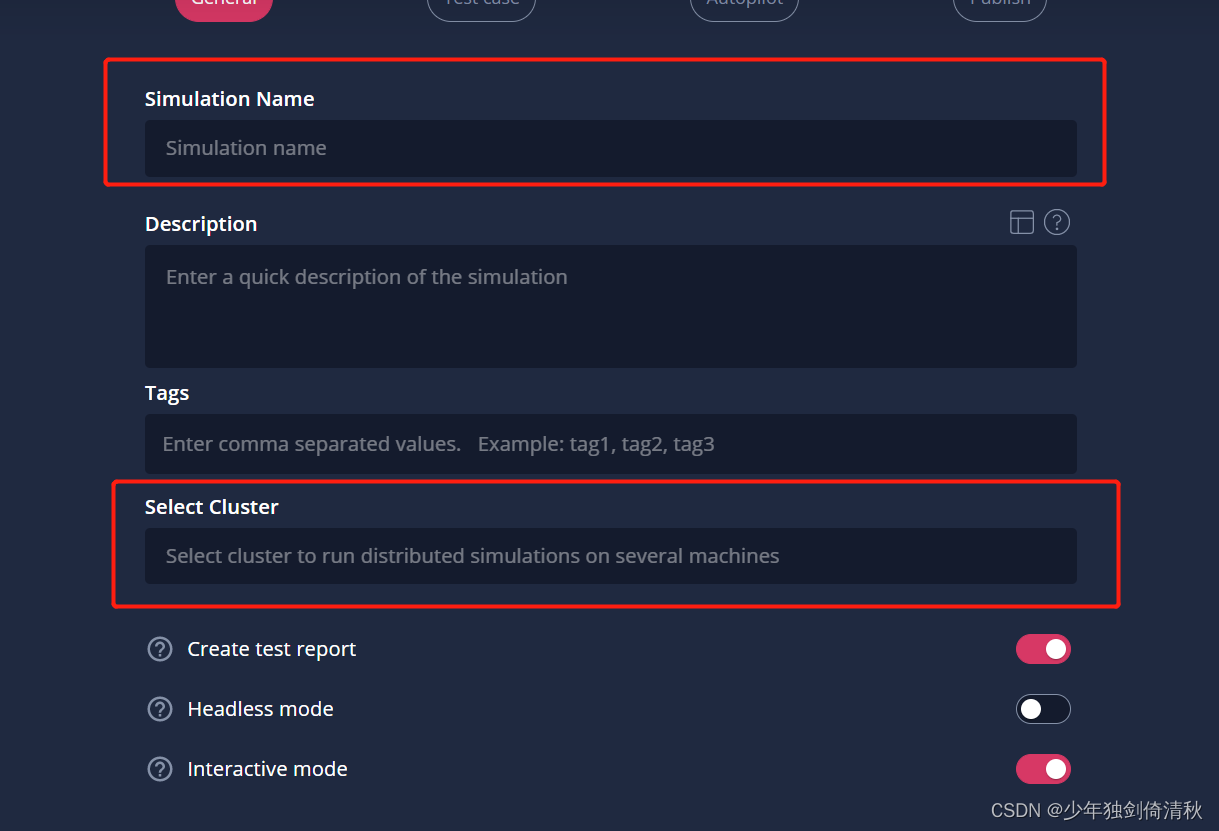
我选择的是这个
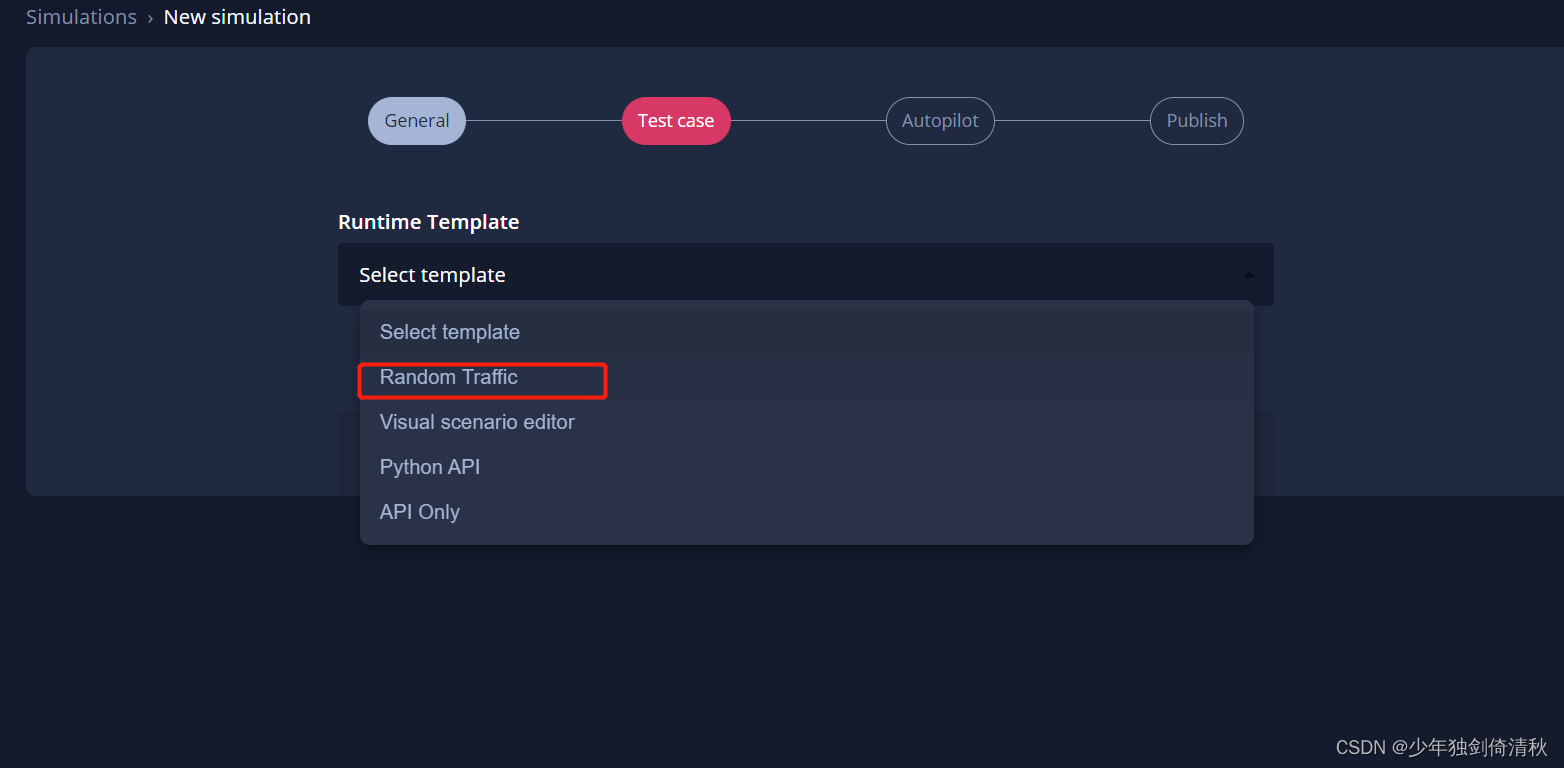
选择地图,选择配置好的车型,选择配置好的传感器
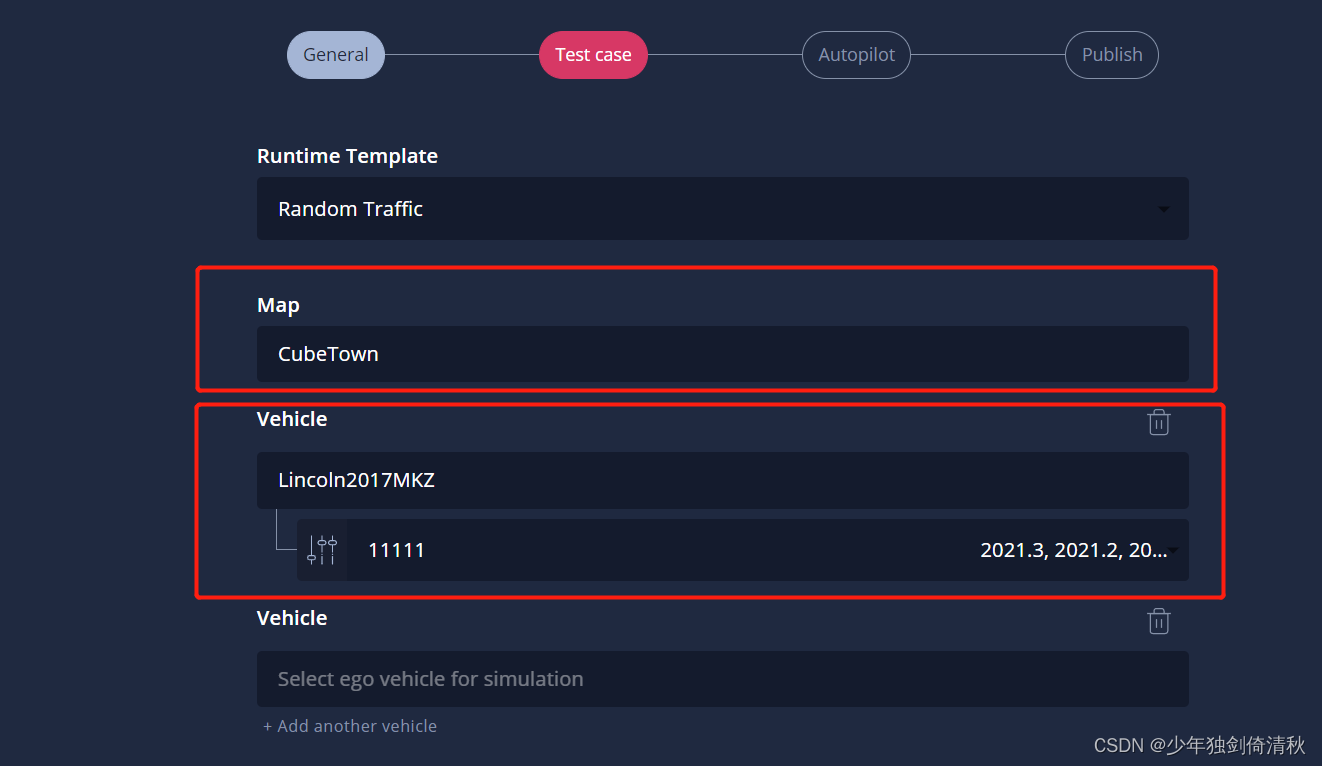
然后下一步
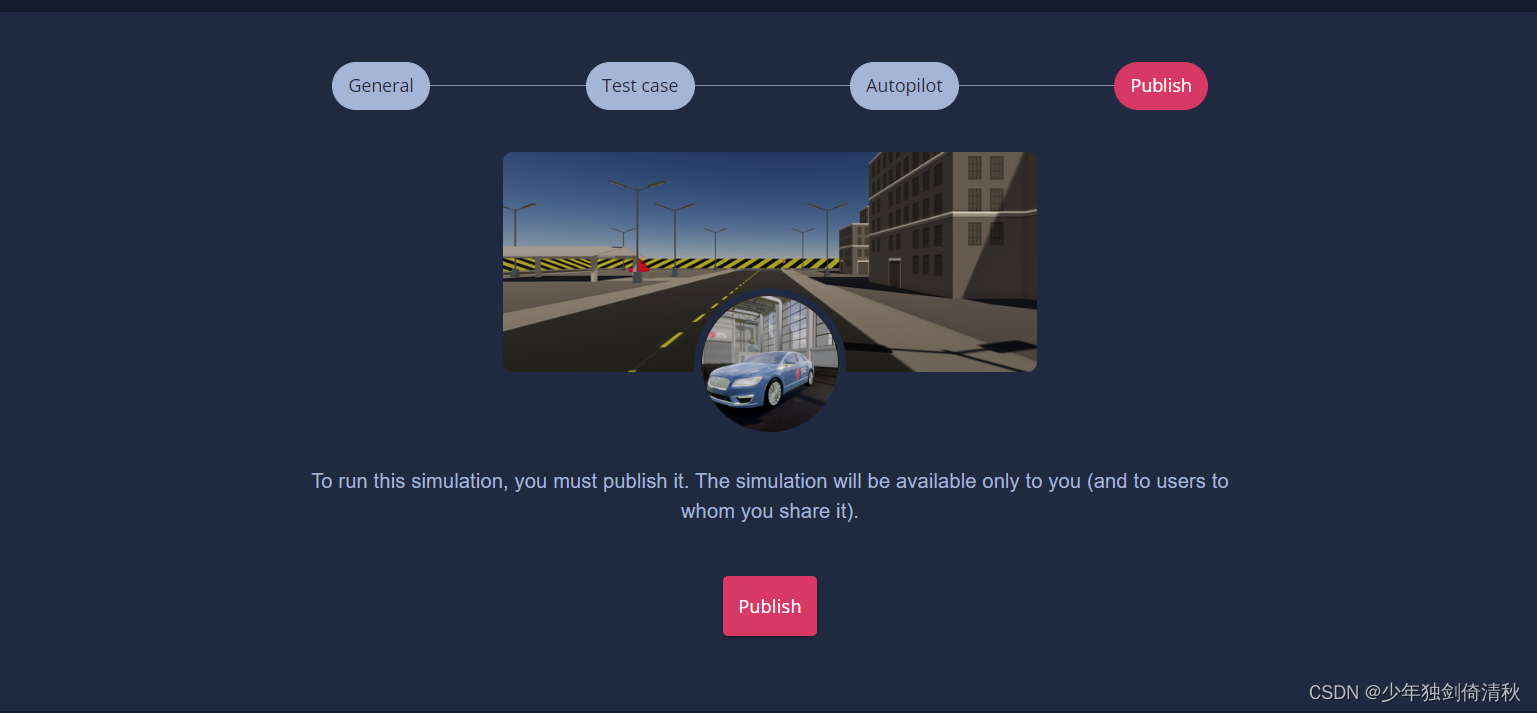
7、最最最最最重要的一步!!!
选择ROS,右边的Bridge输入Xavier的ip地址。端口默认9090。
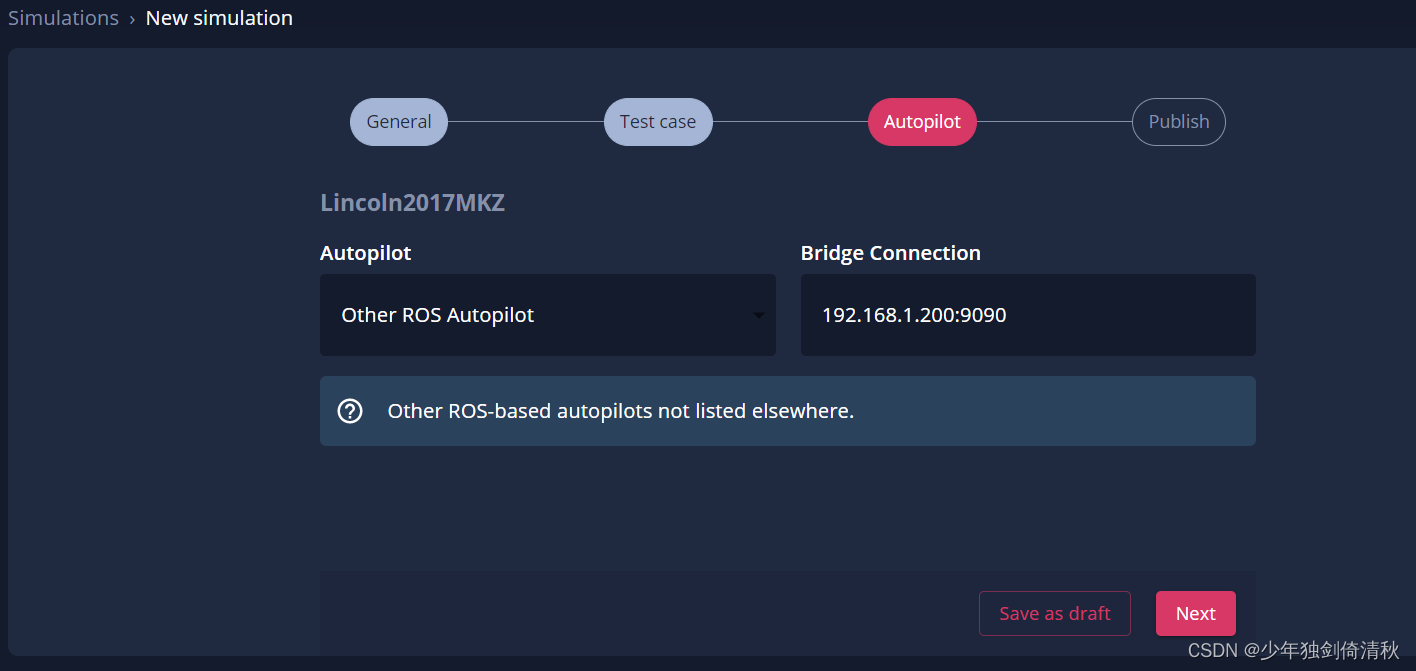
接下来发布
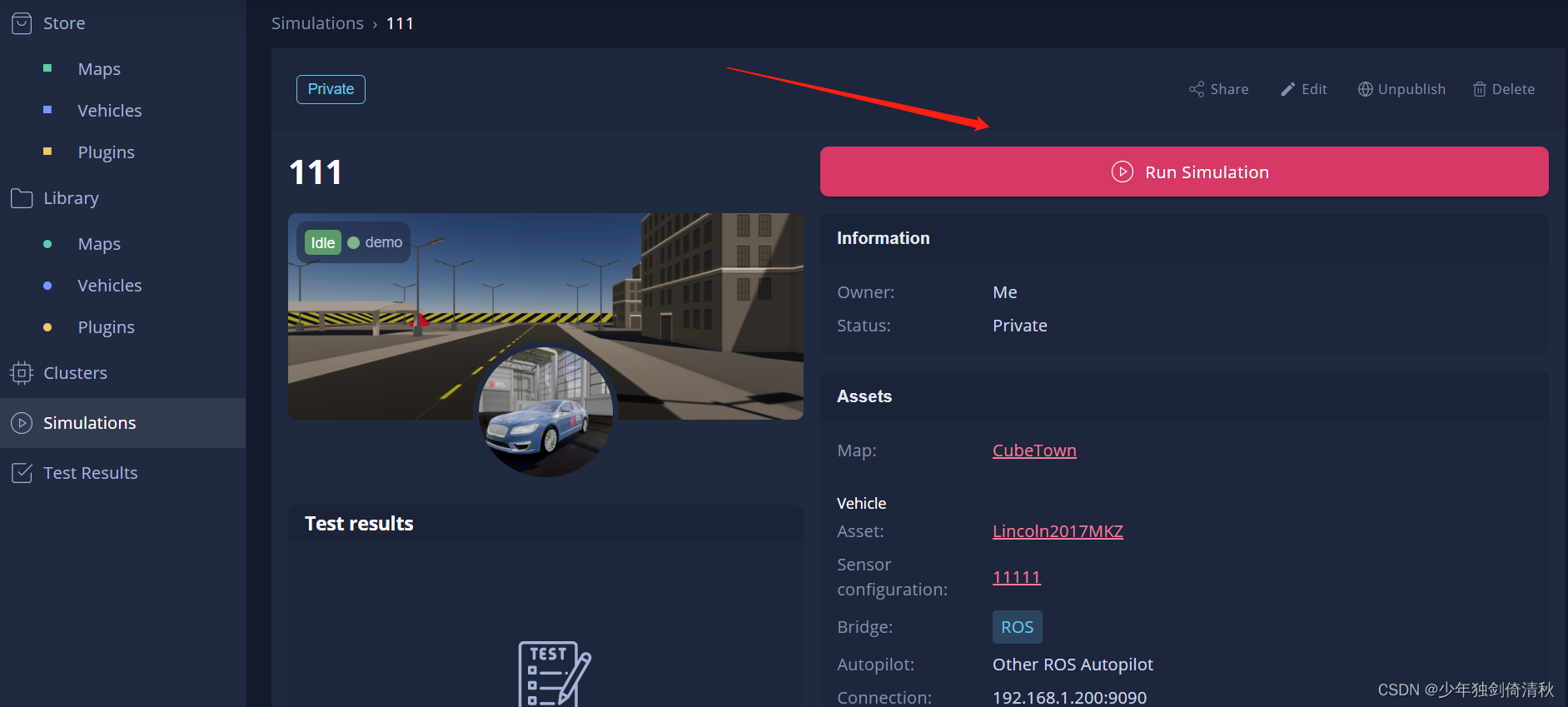
打开LGSVL软件,在网页上点击这个按钮(如果这个按钮是灰色的,让LGSVL软件重新联网)
8、联合仿真
运行起来LGSVL之后,Xavier中运行程序的终端就一直打印输出
打开Rviz,修改Frame,添加点云话题
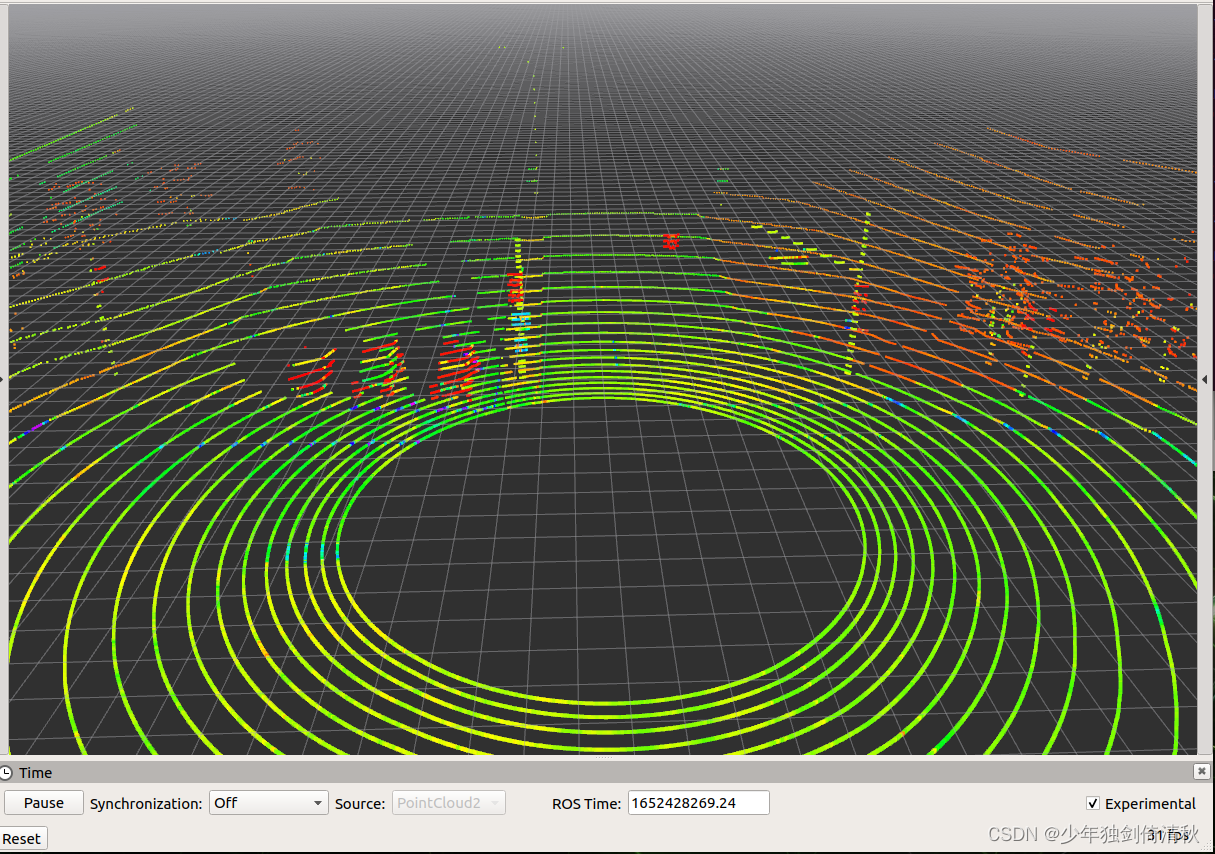

还可以对视觉、定位等传感器进行仿真。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)