遥控器任务框架
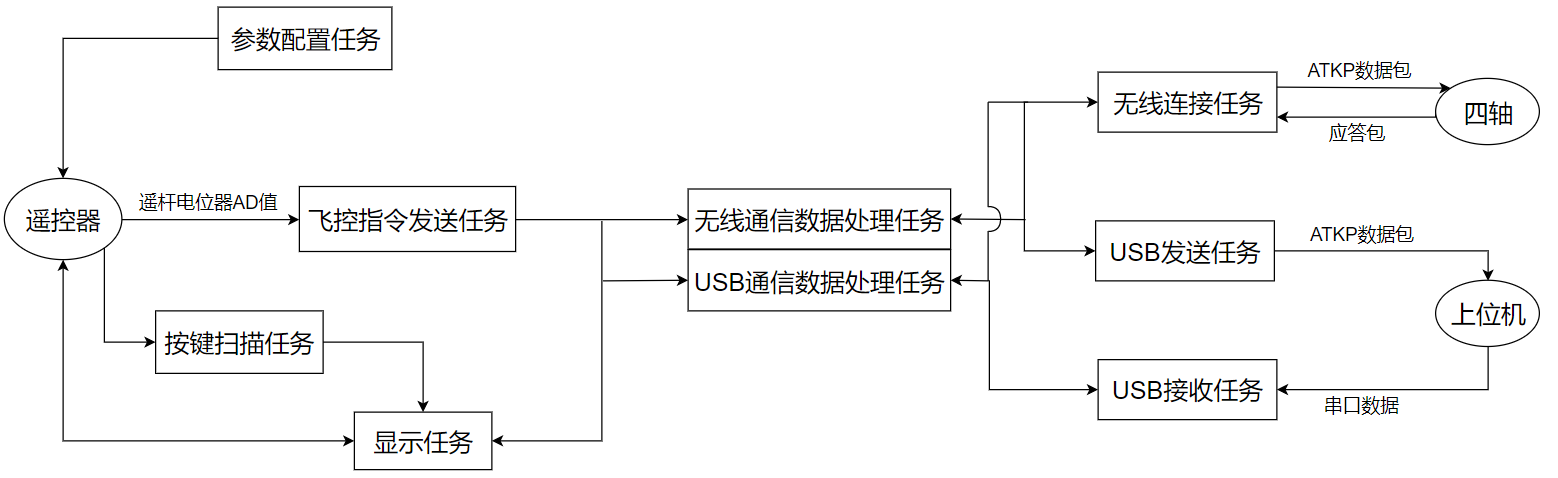
参数配置任务主要功能是保存参数。
按键扫描任务主要功能是扫描按键。
显示任务主要功能是显示界面。
飞控指令发送任务主要功能是将采集摇杆电位器的 AD 值转换为姿态控制命令,并以 10ms的周期通过 radiolink 链路发送给四轴。
无线通信数据处理任务主要功能是处理四轴返回的应答包数据,处理完之后再通过usblink 链路转发给上位机。
USB通信数据处理任务主要功能是处理上位机发下来的 ATKP 数据包,处理完之后通过radiolink 链路转发给四轴。
无线连接任务主要功能是发送 ATKP 数据包给四轴,并接收四轴返回的应答包。
usb发送任务主要功能是给 ATKP 数据包加上帧头和校验并发送给上位机。
usb接收任务主要功能是接收上位机发下来的串口数据,按照 ATKP 格式打包。
遥控器系统框架
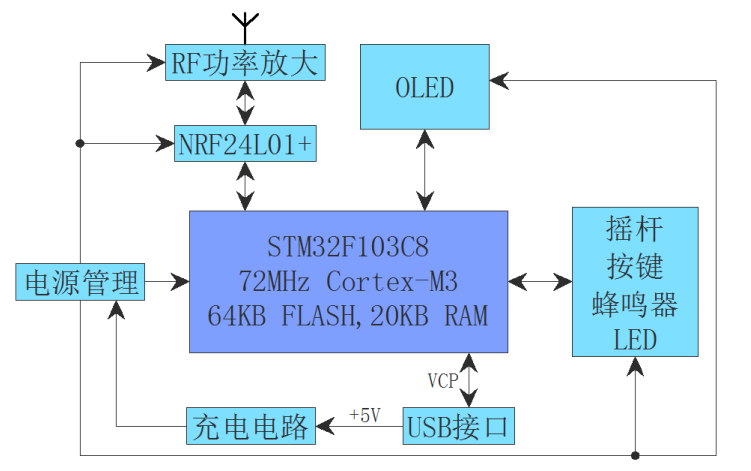
MiniFly 遥控器采用了 STM32F103C8T6 作为控制 MCU,外围硬件主要有蓝色 0.96 寸OLED、NRF24L01+、RF 功率放大、2.4G 天线、摇杆、按键、蜂鸣器、LED 等。
一控多机 → 地面站 ?
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)