本文注意参考了《CAN入门书》,源于此书图片不再特殊标注
目录
- 3.1 总线错误的种类
- 3.1.1 位错误
- 3.1.2 ACK错误
- 3.1.3 填充错误
- 3.1.4 CRC错误
- 3.1.5 格式错误
- 3.2 错误帧结构
- 3.3 错误状态
- 3.3.1 主动错误状态
- 3.3.2 被动错误状态
- 3.3.3 BUSOFF状态
- 3.4 错误帧的发送时机
- 3.5 小结
错误帧内容比较多,单独一讲
3.1 总线错误的种类
一共5种:
- 位错误
- ACK错误
- 填充错误
- CRC错误
- 格式错误
3.1.1 位错误
根据第二节介绍的 回读机制 节点发送自己电平的同时也会回读总线上的实际电平,如果不同,则记一个位错误,有三种情况除外:
- 仲裁时检测到电平不同
- ACK槽检测到电平不同
- 该节点发送被动错误标志
前两点好理解,不理解的同学复习 第二节 ,第三种先挖个坑,后面来填。
3.1.2 ACK错误
当节点发出报文后,回读ACK槽电平没有检测到显示位,则表明总线上没有节点接收到此报文,本节点就会记一个ACK应答错误
3.1.3 填充错误
先讲解一个知识点 位填充原则
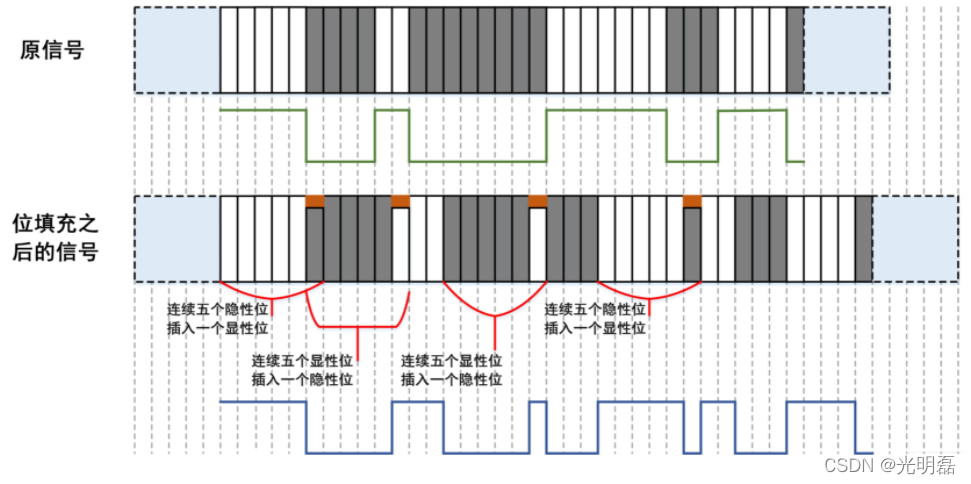
CAN总线没有CLOCK时钟线,收发两方就需要统一波特率,即使这样由于两方晶振误差、传输误差、计量误差等因素还是会可能造成时钟计算的偏移,这就需要利用数据显性、隐性边沿变化不同的进行时钟校准,用于保证采样准确,上述校准有个缺陷,如果出现连续较长的单一电平,比如一直发隐性1,则无法根据边沿进行时钟校准,为解决这个问题,CAN协议规定,当记性相同的电平连续出现5次时,则后面强制插入一个极性相反的位,作用域是SOF~CRC(不包括CRC界定符)
图片源自
- 对于发送方,如果出现连续5位同性电平,则下一位强行插入一个相反电平,再继续发送后面数据,需要注意新插入的一位也参与是否连续电平的计数
- 对于接收方,如果出现连续5位同性电平,则删除下一位,再继续发送后面数据,需要注意删除位参与后面是否连续电平的计数
回到填充错误,如果在SOF~CRC帧段检测到6个及以上同极性电平位,则记一个填充错误。
3.1.4 CRC错误
如果接收方在SOF~DATA帧段主动计算的CRC值和发送方发送的CRC段值不同,则记一个填充错误。
3.1.5 格式错误
如果接收方在各段检测到了不符合协议非法值,则记一个格式错误。
非法值包括:
- CRC界定符、ACK界定符、EOF
- 错误帧界定符
- 过载帧界定符
3.2 错误帧结构
错误帧的发出有两种情况:
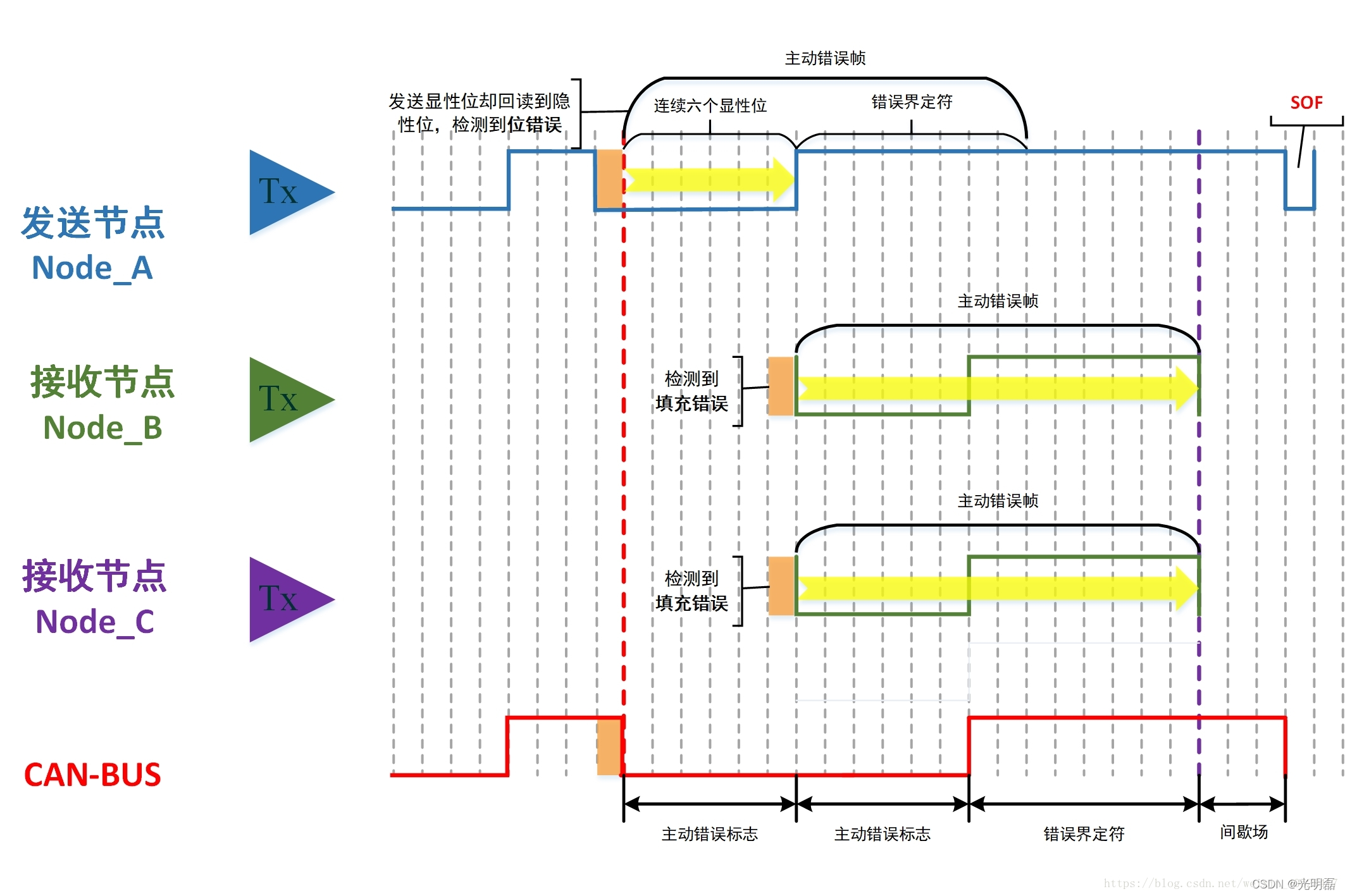
- (被动发出)总线出现上述5种错误,其他节点检测到了,会立马发出错误帧,理论上所有节点都会同时发出错误帧
- (主动发出)发送节点数据发一半想丢弃刚发的数据也会发错误帧
图片源自
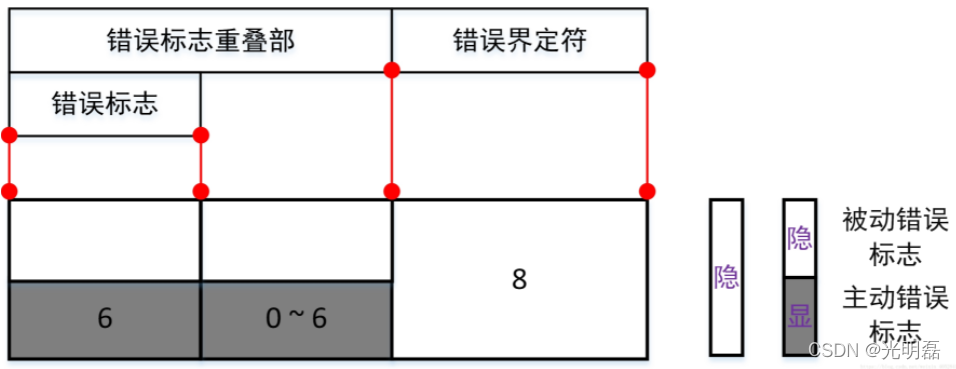
错误帧是由错误标志位和错误界定符组成,错误标志有两种:主动错误标志(6个连续显性位)和被动错误标志(6个连续隐性位),节点处于主动错误状态时(TEC≤127 & REC≤127)发送的错误帧是带主动错误标志,处于被动错误状态时发送错误帧带被动错误标志,节点错误状态后面回介绍,错误界定符是由8个连续隐性位构成。
图片源自
错误标志重叠:对于错误帧的发出情况1不会有错误标志重叠,对于情况2,发送节点Q主动发出错误帧后,连续六个同极性电平会违法“位填充原则”导致其他节点在节点Q发完错误标志位后立马发出自己的错误帧,而其他节点错误帧中如果有主动错误标志,就会造成显性错误标志位不止6位,最大可以达12位的情况,然后大家一起再发送8位的错误界定符。
3.3 错误状态
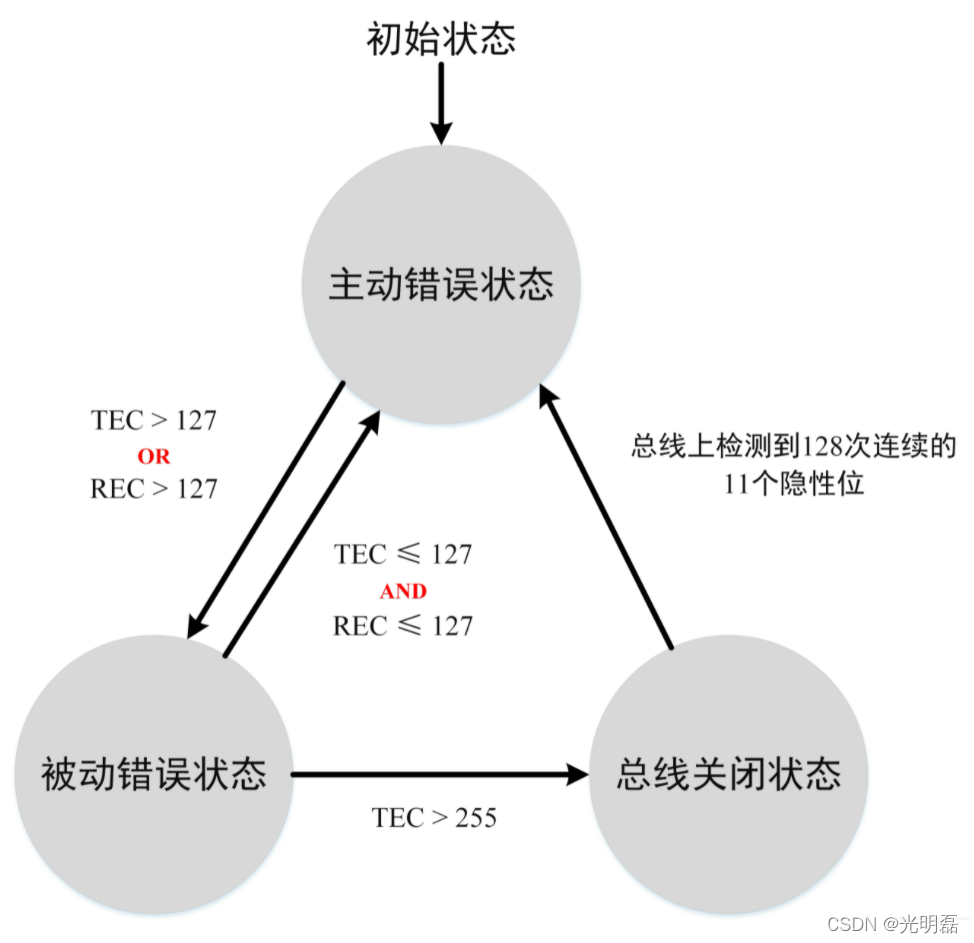
错误状态分为3种,且满足特定条件后可转换状态:
任何节点状态都处于上述3种之一,哪怕从来没出错的节点也是处于主动错误状态,CAN节点错误状态转换是基于发送错误计数器TEC和接收错误计数器REC进行的
 图片源自
图片源自
.计数器具体技计数规则如下
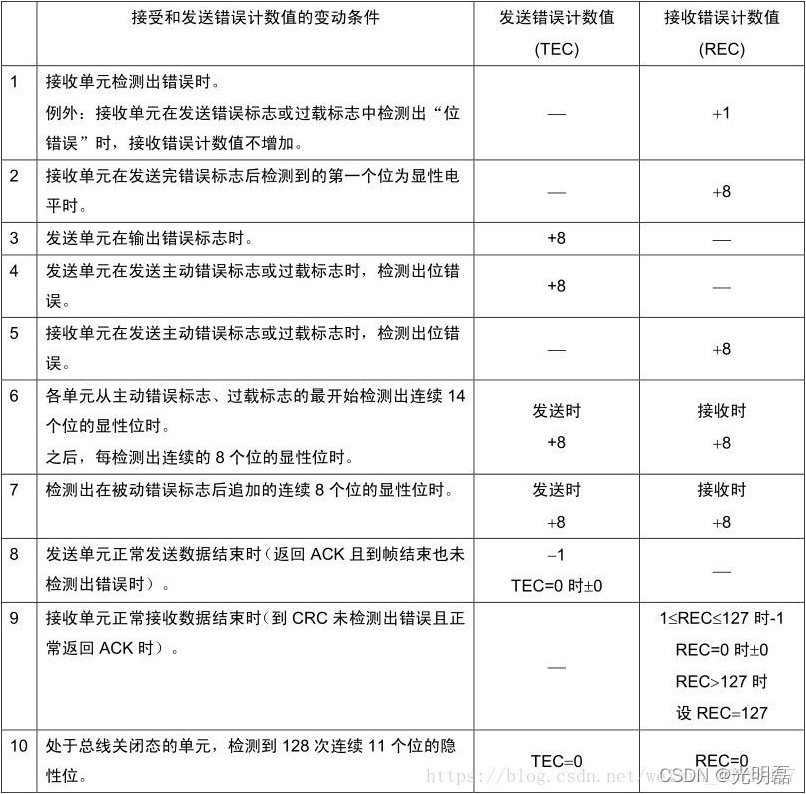 图片源自
图片源自
3.3.1 主动错误状态
当TEC ≤ 127 and REC ≤ 127时,节点处于主动错误状态,此状态下发送的错误帧的含6个显性位的主动错误标志,主动状态下的节点发送的错误帧会破坏总线数据,通知其他节点,也说明这个节点是可靠的。
3.3.2 被动错误状态
当TEC > 127 or REC > 127时,节点处于被动错误状态,此状态下发送的错误帧的含6个隐性位的被动错误标志,被动状态下的节点发送的错误帧不会破坏总线数据,不影响其他节点活动,也说明这个节点是不可靠的。
3.3.3 BUSOFF状态
当发送节点发送数据始终无法成功,TEC > 255时,该节点就会切换到BUSOFF状态,总线关闭不再收发任何报文,也不影响总线其他节点收发数据,处于离线状态,当检测到128次总线空闲(11个连续隐性位)时,TEC和REC置0,回到主动错误状态。
3.4 错误帧的发送时机
节点检测到错误会在错误产生的下一个位发出错误帧,但CRC错误除外,要的等ACK界定符发出后再发错误帧。
需要注意的是,被动错误状态下的发送节点是不可靠节点,如果主动发出被动错误标志的错误帧,6个连续隐性电平后,其他节点就知道这个节点有问题,他们就会做好总线竞争的准备,而这个发送节点需要在发送完错误帧后,发送一个被动错误状态下特有的帧间隔(下节会讲),这个帧间隔除了正常的3个连续隐性位,后会追加8个连续隐性位,作为延迟传送段,这样就会产生连续11个隐性位造成总线空闲,其他节点就可以参与竞争了。
3.5 小结
错误帧一直是比较绕,但始终绕不过去的那个点,工作中遇到的涉及的采样点,busoff, 都和它相关,希望大家耐心啃下来。
>>返回总目录
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)